Y/ // // / / / / j ,f/ / /7/ /y// /y/ /// / -f 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подвижным объектом | 1987 |
|
SU1594102A1 |
| Устройство для управления открывания створок | 1985 |
|
SU1364683A1 |
| Устройство для управления движением кабины подъемника | 1984 |
|
SU1355581A1 |
| Устройство для управления движением кабины подъемника | 1979 |
|
SU1028589A1 |
| Устройство для автоматического регулирования температуры в вагонах рефрижераторного поезда | 1980 |
|
SU1004162A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1980 |
|
SU943149A2 |
| Устройство для управления движением кабины и открыванием дверей лифта | 1980 |
|
SU977346A1 |
| Устройство для управления шнекороторным экскаватором | 1988 |
|
SU1629417A1 |
| Устройство для укладки каната на барабан лебедки | 1979 |
|
SU874592A1 |
| Устройство для открывания и закрывания ворот | 1985 |
|
SU1283345A1 |
Изобретение относится к складскому хозяйству и может быть использовано для управления приводом элеваторного стеллажа. Цель изобретения - повышение надежности. Устройство содержит позиционно-согласующий блок 6, соединенный через муфту 4 и понижающий редуктор 5 с электродвигателем 1, который посредством электромагнитной муфты 2 и понижающего редуктора 3 соединен с приводной звездочкой 8 цепи 7 элеваторного стеллажа. Электромагнитная муфта 2 выполняет функцию механизма корректировки зоны нечувствительности электродвигателя 1. Устройство содержит также блок управления движением цепи 7 (цепного контура), включающий в себя реле времени и двухпозицион- ное реле с двумя обмотками прямого и обратного направлений движения. Устройство обеспечивает при прямом и обратном перемещениях цепи 7 остановку подвижного объекта (полки стеллажа) в одном и том же положении. 1 3.п. ф-лы, 4 ил. i СЛ
Фиг.1
10
20
25
Изобретение относится к складскому хозяйству и может быть использо- вано для управления реверсивным элек- тродвигателем элеваторного склада.
Целью изобретения является повышение надежности устройства.
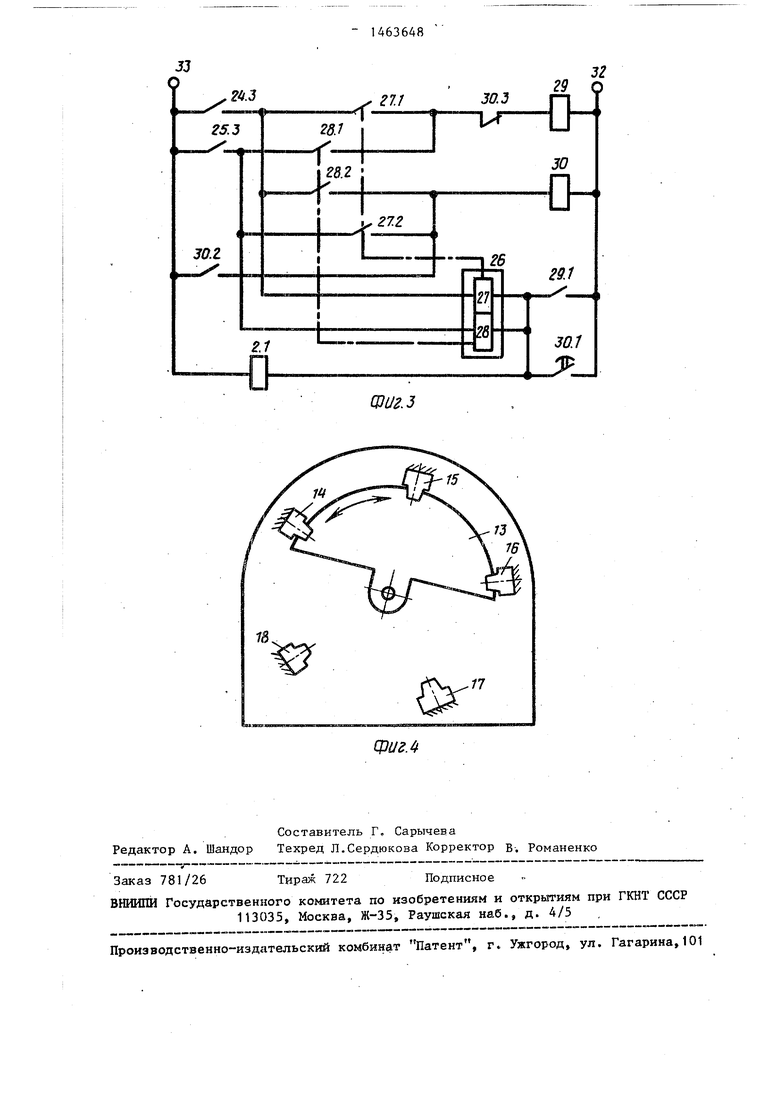
На фиг. 1 схематично изображен элеваторный стеллаж, вид; на фиг. 2 - электрическая схема управ- | ления; на фиг. 3 - электрическая схема механизма корректировки; на фиг. 4 - схема расположения датчиков позиционно-согласующего блока.
Устройство для управления реверси-15 вньм электродвигателем 1 элеваторного стеллажа, соединенного с помощью электромагнитной муфты 2, имеющей катупшу 2.1, с понижающим редуктором 3 стеллажа и с помощью муфты 4 с понижающим редуктором 5, содержит позиционно-согласующий блок 6. Пони- жаклций редуктор 3 посредством цепи 7 соединен с приводной звездочкой 8, при вращении которой могут перемещаться подвещенные на цепи 9 объекты (подвески) 10, предназначенные для промежуточного хранения изделий. Корпус стеллажа имеет загрузочное окII JV
. 1 .
Электромагнитная муфта 2 выполняет функцию механизма корректировки.
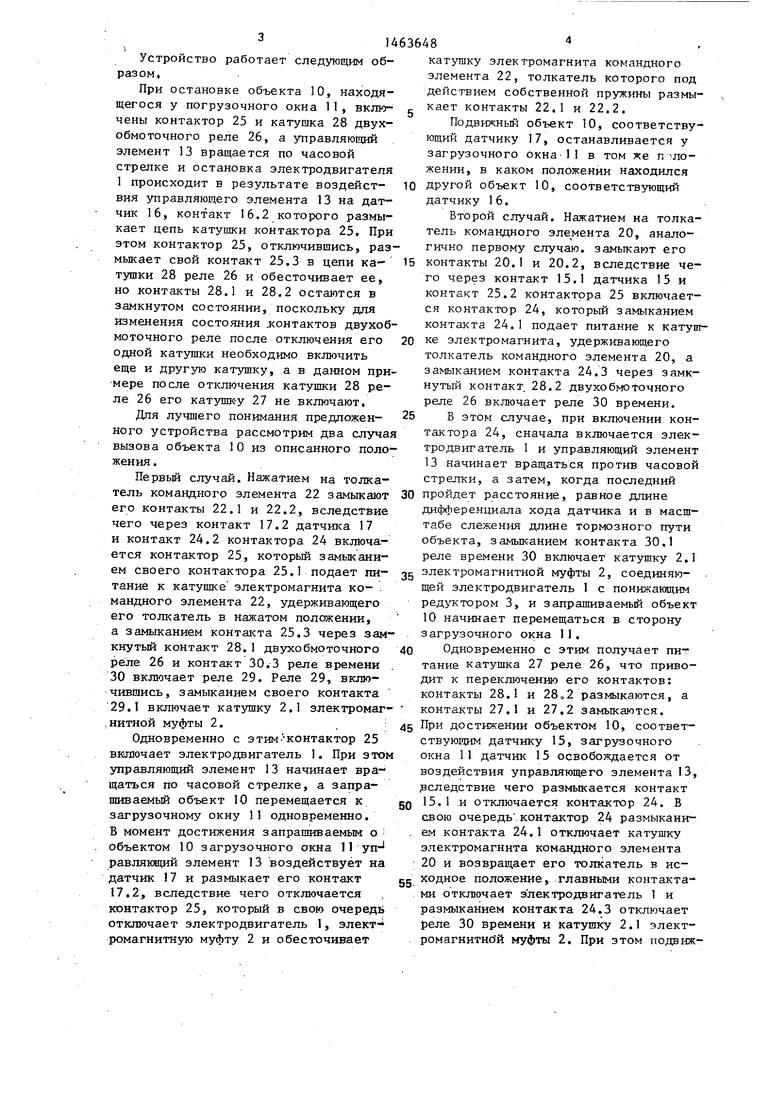
Позиционно-согласующий блок 6, предназначенный для определения положения запрашиваемого объекта 10, ав- 35 томатического выбора направления вращения электродвигателя 1 и остановки объекта против загрузочного окна 1 1 , содержит звездочку 12, кинематически связанную с понижающим редуктором 40 5, управляющий элемент 13, вьшолнен- ный в виде кинематически связанного со звездочкой 12 полукруга, смонтированного с возможностью взаимодействия с размещенными по окружности дат-45 чиками 14, снабженными герметизированными магнитоуправляемыми контактами 14.1, 14.2; 15., 15П, 15.2; 16, 16.1, 16.2; 17, 17.1, 17.2; 18, 18.1 и 18.2 соответственно. Контакты 14.1
50
55
0
20
25
15 JV
354045
,
50
55
с контактами 24.1, 24.2 и 24.3 и контактор 25 с контактами 25, 25.2 и
Двухпозиционные реле 26 с катуш- ками 27 с контактами 27.1, 27.2 и реле 28 с контактами 28.1 и 28.2 предназначено для запоминания сигнала направления вращения электродвигателя 1, что необходимо при включении его в обратном направлении.
Реле 29 с контактом 29.Гпредна- значено для включения катушки 2.1 электромагнитной муфты 2 одновременно с электродвигателем 1 в тех случаях, когда направление движения запрашиваемого объекта 10 совпадает с тем направлением движения, в каком двигался находяпщйся у загрузочного окна 11 объект 10 в момент остановки.
В случае несовпадения указанных
направлений включение катушки 2.1 электромагнитной муфты 2 производится при замыкании у реле 30 времени контакта 30.1 после включения элек- . тродвигателя 1 с выдержкой времени, необходимой для, прохождения управля- нщим элементом 13 длины дифференциала хода датчика (в выбранном прототипе длины неподвижного контакта) и в масштабе слежения длины тормозного пути.
Масштабом слежения в предложенном устройстве назьгаается отношение расстояния между смежньми датчиками к расстоянию между соответствующими объектами. Реле 26 и 30 образуют блок управления движением цепи 7 (цепного контура) элеваторного стеллажа,
Клеммы 31 и 32 предназначены для подключения схем и к источнику питания, а клемма 33 - для подключения схемы блока корректировки к схеме управления. Кнопочный выключатель 34 предназначен для отмены поданной команды в случае необходимости.
Устройство работает следующим образом.
При остановке объекта 10, находящегося у погрузочного окна 11, включены контактор 25 и катушка 28 двух- обмоточного реле 26, а управляющий элемент 13 вращается по часовой стрелке и остановка электродвигателя 1 происходит в результате воздейст- 10 ВИЯ управляющего элемента 13 на датчик 16, контакт 16.2 которого размыкатушку электромагнита командного элемента 22, толкатель которого под действием собственной пружины размыкает контакты 22.1 и 22.2.
Подвижный объект 10, соответствующий датчику 17, останавливается у загрузочного окна- 1 1 в том же п жении, в каком положении находился другой объект 10, соответствующий датчику 16.
Второй случай. Нажатием на толкатель командного элемента 20, аналогично первому случаю, замыкают его
кает цепь катушки контактора 25. При
этом контактор 25, отключившись, раз- ,... ..,„... ..
мыкает свой контакт 25.3 в цепи ка- 15 контакты 20.1 и 20.2, вследствие че- тушки 28 реле 26 и обесточивает ее, го через контакт 15.1 датчика 15 и но контакты 28.1 и 28.2 остаются в замкнутом состоянии, поскольку для изменения состояния лсонтактов двухоб- моточного реле после отключения его 20 одной катушки необходимо включить еще и другую катушку, а в данном при- мере после отключения катушки 28 реле 26 его катушк-у 27 не включают.
Для лучшего понимания предложен- 25 ного устройства рассмотрим два случая вызова объекта 10 из описанного положения.
контакт 25.2 контактора 25 включается контактор 24, который замыканием контакта 24.1 подает питание к катушке электромагнита, удерживающего толкатель командного элемента 20, а замыканием контакта 24.3 через замкнутый контакт. 28.2 двухобмоточного реле 26 включает реле 30 времени.
В этом случае, при включении контактора 24, сначала включается электродвигатель 1 и управляющий элемент 13 начинает вращаться против часовой стрелки, а затем, когда последний
Первьй случай. Нажатием на толкаВ этом случае, при включении контактора 24, сначала включается электродвигатель 1 и управляющий элемент 13 начинает вращаться против часовой стрелки, а затем, когда последний
тель командного элемента 22 замьжают 30 пройдет расстояние, равное длине его контакты 22.1 и 22.2, вследствие дифференциала хода датчика и в масштабе слежения длине тормозного пути объекта, замыканием контакта 30.1
чего через контакт 17.2 датчика 17 и контакт 24.2 контактора 24 включается контактор 25, который замьжаниреле времени 30 включает катушку 2.1
ем своего контактора 25.1 подает пи- 35электромагнитной муфты 2, соединяютание к катушке электромагнита ко- .щей электродвигатель 1 с понижающим
мандного элемента 22, удерживающегоредуктором 3, и запрашиваемый объект
его толкатель в нажатом положении, 10 начинает перемещаться в сторону
а замыканием контакта 25.3 через зам-загрузочного окна 11. кнутьй контакт 28.1 двухобмоточного
40
реле 26 и контакт 30.3 реле времени 30 включает реле 29. Реле 29, включившись, замыканием своего контакта 29.1 включает катушку 2.1 электромаг- ,нитной муфты 2.i
Одновременно с э т им контактор 25 включает электродвигатель 1. При этом управляющий элемент 13 начинает вращаться по часовой стрелке, а запрашиваемый объект 10 перемещается к загрузочному окну П одновременно. В момент достижения запрашиваемым о объектом 10 загрузочного окна 11 уп- равлякяций элемент 13 воздействует на датчик 17 и размыкает его контакт 17.2, вследствие чего отключается контактор 25, который в свок очередь отключает электродвигатель 1, элект- ромагнитную муфту 2 и обесточивает
Одновременно с этим получает пиг тание катушка 27 реле 26, что приводит к переключению его контактов: контакты 28.1 и размыкаются, а контакты 27.1 и 27.2 замьпсаются.
45 При достижении объектом 10, соответствующим датчику 15, загрузочного окна 11 датчик 15 освобождается от воздействия управляющего элемента 13, следствие чего размыкается контакт
50 15.1 и отключается контактор 24. В
свою очередь , контактор 24 размыкани- . ем контакта 24.1 отключает катушку электромагнита командного элемента 20 и возвращает его толкатель в исgg ходное положение, главными контакта- ми отключает электродвигатель 1 и размыканием контакта 24.3 отключает реле 30 времени и катушку 2.1 элект- ромагнитно й муфты 2. При этом подвижкатушку электромагнита командного элемента 22, толкатель которого под действием собственной пружины размыкает контакты 22.1 и 22.2.
Подвижный объект 10, соответствующий датчику 17, останавливается у загрузочного окна- 1 1 в том же п жении, в каком положении находился другой объект 10, соответствующий датчику 16.
Второй случай. Нажатием на толкатель командного элемента 20, аналогично первому случаю, замыкают его
,... ..,„... ..
контакты 20.1 и 20.2, вследствие че- го через контакт 15.1 датчика 15 и
контакты 20.1 и 20.2, вследствие че- го через контакт 15.1 датчика 15 и
контакт 25.2 контактора 25 включается контактор 24, который замыканием контакта 24.1 подает питание к катушке электромагнита, удерживающего толкатель командного элемента 20, а замыканием контакта 24.3 через замкнутый контакт. 28.2 двухобмоточного реле 26 включает реле 30 времени.
В этом случае, при включении контактора 24, сначала включается электродвигатель 1 и управляющий элемент 13 начинает вращаться против часовой стрелки, а затем, когда последний
реле времени 30 включает катушку 2.1
загрузочного окна 11.
40
Одновременно с этим получает пиг тание катушка 27 реле 26, что приводит к переключению его контактов: контакты 28.1 и размыкаются, а контакты 27.1 и 27.2 замьпсаются.
45 При достижении объектом 10, соответствующим датчику 15, загрузочного окна 11 датчик 15 освобождается от воздействия управляющего элемента 13, следствие чего размыкается контакт
50 15.1 и отключается контактор 24. В
свою очередь , контактор 24 размыкани- . ем контакта 24.1 отключает катушку электромагнита командного элемента 20 и возвращает его толкатель в исgg ходное положение, главными контакта- ми отключает электродвигатель 1 и размыканием контакта 24.3 отключает реле 30 времени и катушку 2.1 элект- ромагнитно й муфты 2. При этом подвиж51463648
ньй объект 10, соответств ующий датчи- ;ку 15, останавливается против загру iaoMHoro окна 11 в таком же положении, в каком останавливались другие объ- . акты.
Эапрашиваемьй объект останавлива- |ется в одном и том же положении про- ;тив загрузочного окна независимо от направления движения при остановке ю ,что повьшает надежность работы уст- 1|ройства, Использование электромаг- Iниткой муфты для устранения зоны не- чувствительности (погреишости) упроуправления движением цепного контура элеваторного стеллажа содержит,реле времени и двухлозиционное реле с дву мя обмотк ами прямого и обратного направления движения, одни концы которых объединены и подключены к первому полюсу источника питания через первые замыкающие контакты реле времени и реле включения механизма ор- ректировки, один конец обмотки которого подключен к первому полюсу источника питания, а другой через размыкающий контакт реле времени, объщает конструкцию устройства, так как 5 единенные первые замыкающие контак- - отпадает необходимость в примененииты двухпозицлонного реле и замыкающие контакты контакторов прямого и
специального корректируюп его устрой ства.
Формула из обретения 20
реверсивного включения - к второму полюсу источника питания, конец об- мотки репе времени подключен к перво му полюсу источника питания,- а второй через объединенные вторые замыкающие контакты двухпозиционньк рел и замыкающие контакты контакторов прямого и реверсивного включения - к второму полюсу источника питания, к .которому также подключен второй з мыкающий контакт реле времени, свя- занньй с вторьпч концом обмотки упом нутого реле, при этом другие концы обмоток прямого и обратного направл ния движения двухпозиционного реле связаны с вторым полюсом источника питания через заушающие контакты контакторов прямого и реверсивного включения электродвигателя,
1, Устройство для управления приводом элеваторного стеллгша, имеющим сйязанный е цепным контуром электродвигатель, содержащее механизм кор ректировки зоны нечувствительности электродвигателя,, позидионно-согласующий блок, включающий в себя управляющий элемент, вьшолненньй в виде полукруга5 перекрывающего по меньшей мере половину размещенных по окружности датчиков, электрически связанных с командными элементамиз выполненными в виде кнопочньк выключателей с электромагнитной фиксац,ией, и блок управления движением цепного контура элеваторного стеготажа включающий в себя реле вклкиения механизма корректировки зоны нечувствительности.и контакторы прямого и реверсивного включения электродвигателя, отличающее с я тем, что, с целью повышения надежности, блок
управления движением цепного контура элеваторного стеллажа содержит,реле времени и двухлозиционное реле с двумя обмотк ами прямого и обратного направления движения, одни концы которых объединены и подключены к первому полюсу источника питания через первые замыкающие контакты реле времени и реле включения механизма ор- ректировки, один конец обмотки которого подключен к первому полюсу источника питания, а другой через размыкающий контакт реле времени, объщие контакты контакторов прямого и
5
0
5
реверсивного включения - к второму полюсу источника питания, конец об- . мотки репе времени подключен к первому полюсу источника питания,- а второй через объединенные вторые замыкающие контакты двухпозиционньк реле и замыкающие контакты контакторов прямого и реверсивного включения - к второму полюсу источника питания, к .которому также подключен второй замыкающий контакт реле времени, свя- занньй с вторьпч концом обмотки упомя,- нутого реле, при этом другие концы . обмоток прямого и обратного направления движения двухпозиционного реле связаны с вторым полюсом источника питания через заушающие контакты контакторов прямого и реверсивного включения электродвигателя,
J4« 31
1&-о
y/V
Jf.
Ш
/
:Ч,
r
л/
Jf.
i-f.f
ж
jp.
zf
22
Л
25,1
I
J.
ojj
Д О
/
/7
/5
/Й2
f4,5
4L/
лй-
Ц}и2.3
цзигл
| Устройство для автоматического адресования объекта по кратчайшему пути | 1980 |
|
SU943149A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
