Изобретение относится к техноло гической оснастке предприятий строй- индустрии, а именно к средствам перемещения, и фиксации форм-вагонеток на автоматизированных конвейерных линияхJ преимущественно при изготовлении железобетонных изделий широкой номенклатуры.
Целью изобретения является новы- шение производительности устройства.
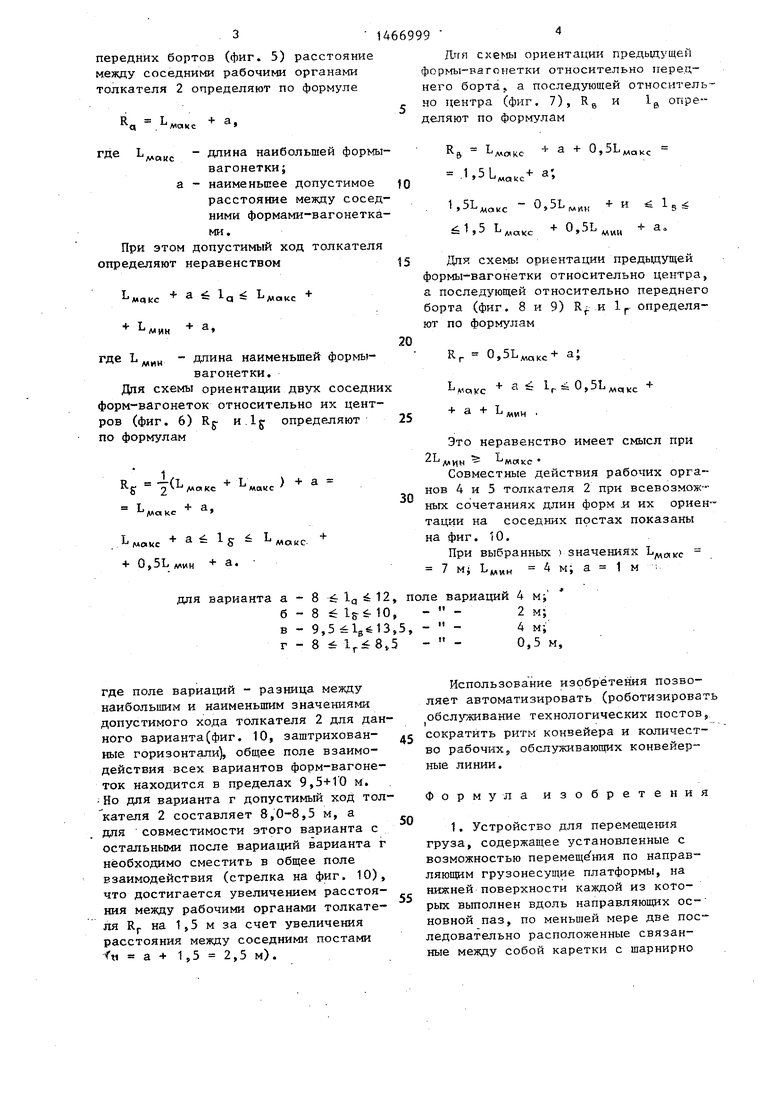
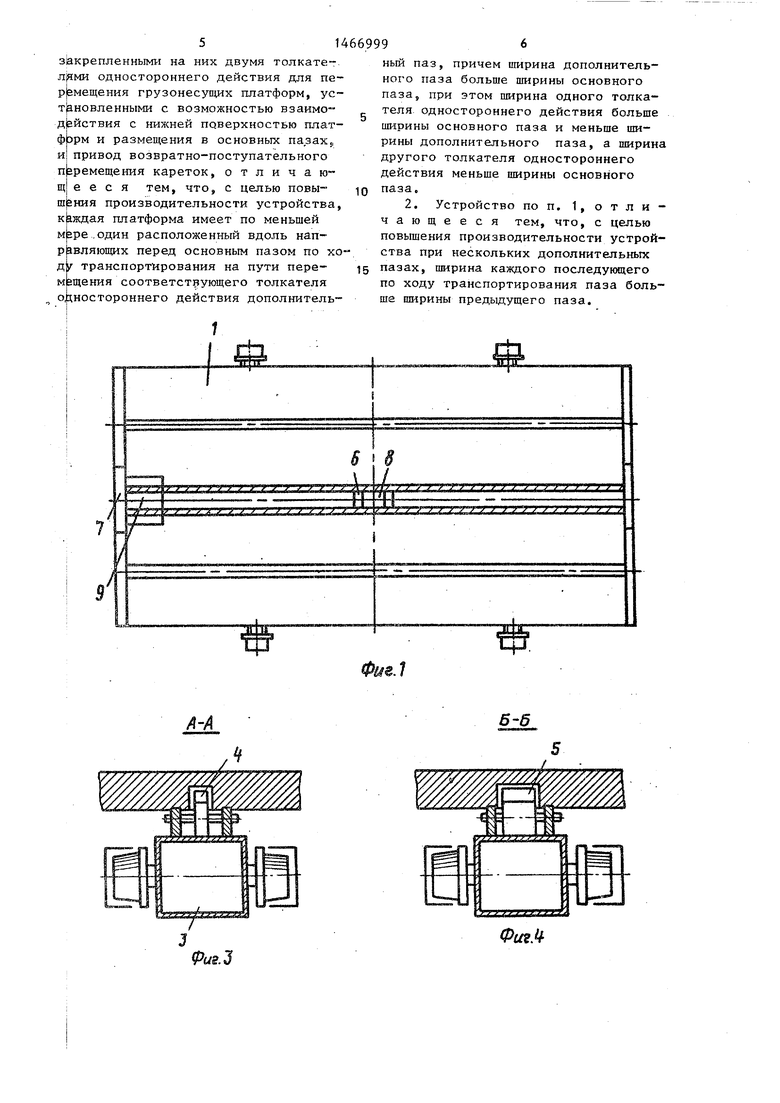
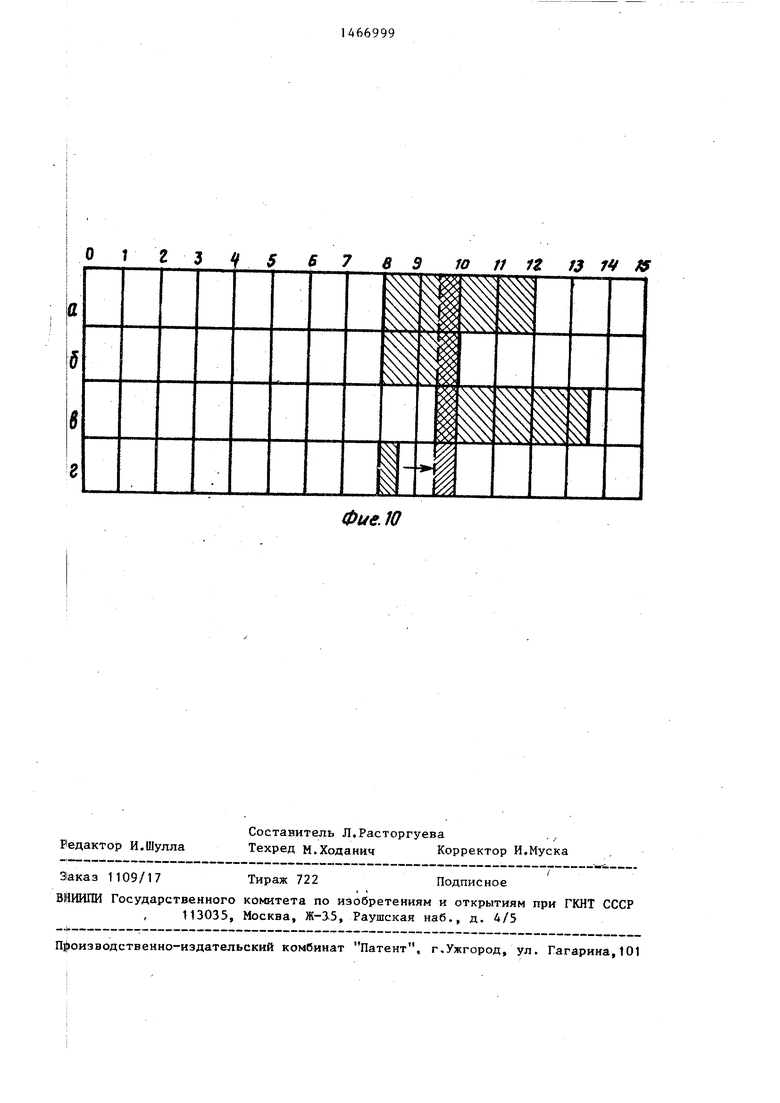
На фиг. 1 показана форма-вагонетка, вид снизу; на фиг, 2 - устройство для перемещения форм-вагонеток, фрагмент, вид сбоку; на фиг. 3 - сечение А-А на фиг. 2 (устройство с ориентацией формы вагонетки на кон- вейере относительно ее центра); на фиг. 4 - сечение Б-Б на фиг. 2 (устройство с ориентацией относительно переднего борта)j на фиг. 5 - схема ориентации двух соседних форм-вагонеток относительно их передних бортов ; на фиг. 6 - схема ориентации двух соседних форм-вагонеток относи- I тельно их центров; на фиг. 7 - схема ориентации предыдущей формы-вагонетки относительно переднего борта, а последующей относительно центра; на фиг. 8 и 9 - схемы ориентации пре- дьщущей формы-вагонетки относительно центра, а последующей относительно переднего борта соответственно; на I фиг, 10 - график совместимости дейст
ВИЙ рабочих органов толкателя при различных сочетаниях форм-вагонеток соседних постов.
Устройство для перемещения груза содержит установленные с возможностью перемещения грузонесущие ппатформы, в частности формы вагонетки 1, многопостовой толкатель 2 циклического действия с приводом возвратно- поступательного перемещения (не показан) . Толкатель 2 содержит по меньшей мере две последовательно расположенные связанные между собой грузо ведущие каретки 3 с рабочими органами 4 и 5 в виде шарнирно закрепленных на каретках 3 толкателей одностороннего действия (по одному на каждой каретке). Рабочие органы 4 и 5 воздействуют на упоры 6 и 7, которые являются одними из стенок основ™ ного 8 и дополнительного 9 пазов, выполненных на нижней поверхности платформ. Рабочие органы 4 и 5 установлены с возможностью взаимодействия с нижней поверхностью платформ и
Q
5 0 5 0
5
Q
0
5
размещения в основном 8 и дополнительном 9 пазах. Основной паз 8 расположен в центре днища формы-вагонетки, а дополнительный паз 9 - преимущественно у передних бортов форм-вагонеток на их продольной оси.
Грузонесущие платформы установлены с возможностью перемещения по направляющим 10. Каждая платформа имеет по меньшей мере один расположенный вдоль направляющих 10 перед основным пазом 8 по ходу транспортирования на пути перемещения соответствующего толкателя одностороннего действия дополнительный паз 9. Причем щирина дополнительного паза 9 больше ширины основного паза 8, при этом ширина одного рабочего органа 5 (толкателя одностороннего действия) больше ширины основного паза 8 и меньше ширины дополнительного паза. А ширина другого рабочего органа 4 (толкателя одностороннего действия) меньше ширины основного паза 8. При этом при нескольких дополнительных пазах 9 ширина каждого последующего по ходу транспортирования паза 9 больше ширины предыдущего паза 9.
Устройство работает следугацим образом.
При движении кареток 3 многопостового толкателя 2 вперед посредством привода узкие рабочие органы 4 попадают в пазы 8 и воздействуют на упоры 6, а широкие рабочие органы 5 скользят на своем пути мимо узких пазов 8, далее попадают в широкие пазы 9 и воздействуют на упоры 7,тем самым перемещают формы-вагонетки. Толкатель 2, придя в крайнее переднее положение, сориентирует каждую форму-вагонетку на всех постах относительно центра либо переднего ее борта.
При обратном движении кареток 3 толкателя 2 все рабочие органы 4 и 5 утапливаются, отжимаясь накпонной плоскостью от упоров форм-вагонеток. Расстояние между соседними рабочими органами определяют при конструировании конвейерной линии. Например, при наличии у формы-вагонетки только двух упоров в центре и у переднего борта могут возникнуть четьфе варианта размещения (ориентации) двух соседних форм-вагонеток (см. фиг. 5-9).
При необходимости ориентации двух соседних форм-вагонеток относительно
3 1466999
передних бортов (фиг. 5) расстояние Дня схемы ориентации предыдущей между соседними рабочими органами формы-вагонетки относительно перед- толкателя 2 определяют по формуле
него борта, а последующей относнтель
но центра (фиг. 7), Rg и Ig определяют по формулам
дпина наибольшей формы Дня схемы ориентации предыдущей формы-вагонетки относительно перед-
него борта, а последующей относнтельно центра (фиг. 7), Rg и Ig определяют по формулам
Rft Ьд,о,кс а + 0,5Ь„„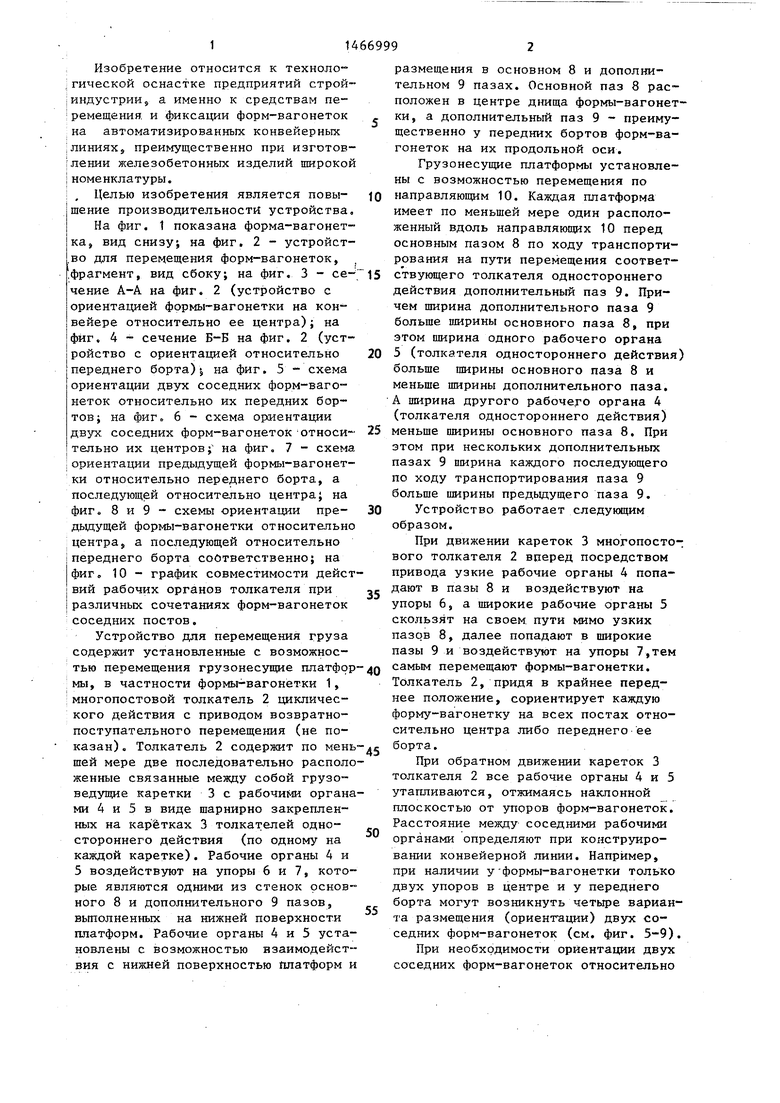
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения форм-вагонеток | 1987 |
|
SU1456341A1 |
| Двухъярусная конвейерная линия для изготовления изделий из бетонных смесей | 1986 |
|
SU1433807A1 |
| Автомат-разгрузчик изделий с сушильной вагонетки | 1982 |
|
SU1033336A1 |
| Цепной безкотлованный толкатель | 1976 |
|
SU596720A1 |
| Канатный толкатель для вагонеток | 1983 |
|
SU1093830A1 |
| Толкатель нижнего действия для обмена вагонеток в клети | 1975 |
|
SU602464A1 |
| Автоматическая линия для разгрузки бетонных элементов на поддонах из сушильных вагонеток | 1982 |
|
SU1115906A1 |
| Толкатель для перемещения вагонеток через стрелочный перевод рельсового пути | 1973 |
|
SU451604A1 |
| Толкатель верхнего действия тоннелепроходческого комплекса | 1988 |
|
SU1645564A1 |
| Толкатель печных вагонеток | 1983 |
|
SU1153218A1 |
Изобретение относится к технологической оснастке предприятий ..стройиндустрии. Цель - повышение произв-сти устройства. Оно включает установленные с возможностью перемещения по направляющим (Н) 10 грузо- несущие платформы (П) 1, по меньшей мере две последовательно расположенные и связанные между собой каретки 3 и привод возвратно-поступательного перемещения кареток 3. На нижней поверхности каждой П 1 вдоль Н 10 выполнен основной паз 8. На каретках 3 шарнирно закреплены толкатели (Т) 4 и 5 одностороннего действия для перемещения П 1, установленные с возможностью взаимодействия с нижней поверхностью П 1 и размещения в пазах 8. Каждая П ,1 имеет по меньшей мере один расположенный вдоль Н 10 перед пазом 8 по ходу транспортирования на пути перемещения соответствующего Т дополнительный паз 9. Ширина паза 9 больше ширины паза 8. и1ирина Т 5 больше ширины паза 8 и меньше ширины паза 9, а ширина Т 4 меньше ширины паза 8. При движении кареток 3 узкие Т 4 попадают в пазы 8, а Т 5 скользят мимо пазов 8 и попадают в пазы 9, перемещая П 1. 1 3.П. ф-лы, 10 ил. с (С ПЯ& 4; 35 ;D
вагонетки;
а - наименьшее допустимое расстояние между соседними формами-вагонетками.
При этом допустимый ход толкателя определяют неравенством
«а а : |лav.C
а 6 1„ и L; + а.
где L
мин
длина наименьшей формы- вагонетки.
Для схемы ориентации двзос соседних форм-вагонеток относительно их центров (фиг. 6) Rg- и,1 определяют по формулам
R, {(L
АЛСТКСмакс
Ьд.акс - а,
Ьмо.кс - а -S мокс.
+ а Ig 6 L + 0,5L АЛ1ЛН + а.
для варианта а - 8 Ig 12, поле вариаций 4 б - 8 , - - 2м; в - 9,,5, - - 4 м; г - В ,5 - - 0,5 м.
где поле вариаций - разница между наибольшим и наименьшим значениями допустимого хода толкателя 2 для данного варианта(фиг. 10, заштрихован- ные горизонтали), общее поле взаимодействия всех вариантов форм-вагонеток находится в пределах 9,5+10 м. - Но для варианта г допустимый ход тол кателя 2 составляет 8,0-8,5 м, а для совместимости этого варианта с остальными после вариаций варианта г необходимо сместить в общее поле взаимодействия (стрелка на фиг. 10), что достигается увеличением расстоя- кия между рабочими органами толкателя Rj. на 1,5 м за счет увеличения расстояния между соседними постами Ги а + 1,5 2,5 м).
(C
6 1,5 L.., + 0.5Ь„„н
f и
Дпн схемы ориентации предьщущей формы-вагонетки относительно центра, а последующей относительно переднего борта (фиг. 8 и 9) Rf и 1 определяют по формулам
г 0, а;
,,e +
25
+ а + L
мин
0
Это неравенство имеет смысл при
2L,HH МИКС
Совместные действия рабочих органов 4 и 5 толкателя 2 при всевозможных сочетаниях длин форм .и их ориентации на соседних постах показаны на фиг. 10.
При выбранных ) значенияк ,,,,. 7 Mi Ъ„„н 4 м; а 1 м
Использова ние изобретения позволяет автоматизировать (роботизироват обслуживание технологических постов, сократить ритм конвейера и количество рабочих, обслуживающих конвейерные линии.
Формула изобретения
1, Устройство для перемещения груза, содержащее установленные с возможностью перемещй ния по направляющим грузонесущие платформы, на нижней поверхности каждой из которых вьтолнен вдоль направляющих основной паз, по меньшей мере две последовательно расположенные связанные между собой каретки с шарнирно
51
з1акрепленными на них двумя толкате-. лрми одностороннего действия для пе- р|емещения грузонесущих платформ, ус т|ановленными с возможностью взаимо- д|вйствия с нижней поверхностью плат- ф|орм и размещения в основных пазахj, и| привод возвратно-поступательного перемещения кареток, о т л и ч а го- Щ| е е с я тем, что, с целью повы- производительности устройства, каждая платформа имеет по меньшей .один расположенный вдоль нап- р вляющих перед основным пазом по хо д транспортирования на пути пере- мощения соответствующего толкателя одностороннего действия дополнитель
us.
ный паз, причем ширина дополнительного паза больше ширины основного паза, при этом ширина одного толкателя одностороннего действия больше ширины основного паза и меньше ширины дополнительного паза, а ширина другого толкателя одностороннего действия меньше ширины основного паза.
S 8
6-6
Фи.
lo - Яа
Фиг. 6
Фие.7
фиг, 5
Фи€. Ю
| Толкающий штанговый конвейер | 1960 |
|
SU135813A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| СПОСОБ ОТДЕЛЕНИЯ ЛАКОКРАСОЧНЫХ ПОКРЫТИЙ ОТ ПЛАСТМАССОВЫХ ПОВЕРХНОСТЕЙ | 2003 |
|
RU2240875C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
