Изобретение относится к подъемно-транспортной технике, в частности к грузозахватным устройствам.
Цель изобретения - повышение надежности.5
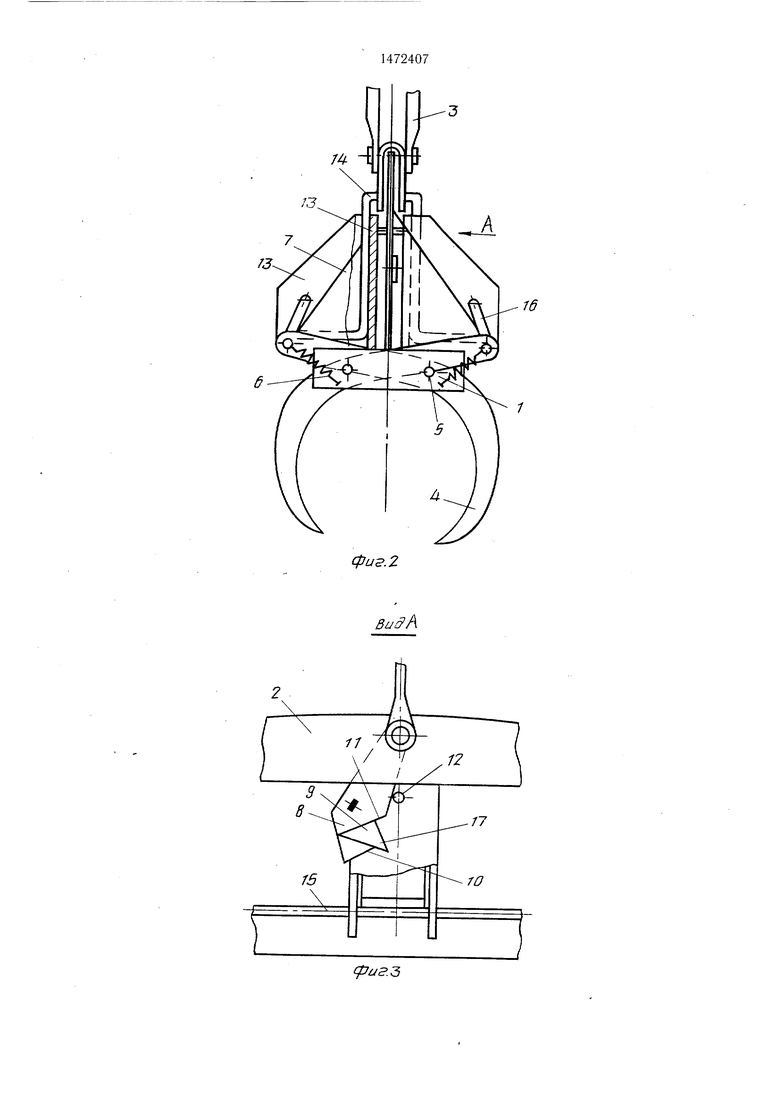
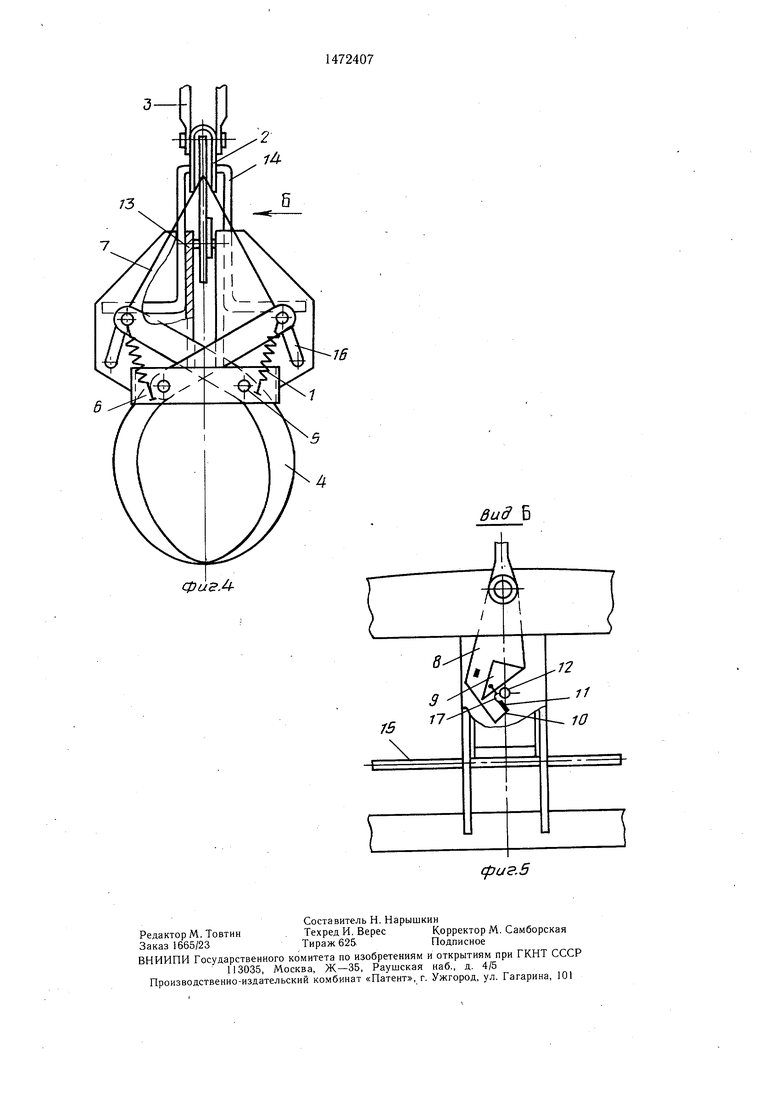
На фиг. 1 показано грузозахватное устройство, общий вид; на фиг. 2 - грузозахватное А стройство в момент захвата груза; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - грузозахватное устройство в момент освобож- . дения груза; на фиг. 5 - вид Б на фиг. 4.
Грузозахватное устройство содержит траверсу 1, закрепленный на ней шарнирный параллелограмм 2 с прицепной петлей 3, шар- нирно установленные на траверсе клещевины
ме захвата клещевины 4 захватывают груз, при этом тяги 15 перемещаются в крайнее верхнее положение.
При опускании устройства с грузом шарнирный параллелограмм 2 складывается, при этом кронштейны 14, перемещаясь в вертикальных направляющих 13, нижними концами доходят до тяг 15, находящихся в крайнем верхнем положении и выполняющих роль ограничителей хода. Тяги 15 препятствуют дальнейщему перемещению кронштейнов 14 и крюка 8 вниз независимо от лродолжающегося опускания грузозахватного органа. После захода оси 12 в паз 11 крюка 8 устройство поднимают, при этом кле4, установленные на осях 5 траверсы 1 в 15 щевины 4 разжимаются посредством пружин
6. Груз освобождается, а тяги 15 занимают крайнее нижнее положение.
плоскостях, расположенных перпендикулярно плоскости параллелограмма. Свободные концы клещевин 4 притягиваются к траверсе 1 посредством пружин 6 и связаны со звеньями параллелограмма 2 гибкими тягами 7.
6. Груз освобождается, а тяги 15 занимают крайнее нижнее положение.
Формула изобретения
20
Грузозахватное устройство, содержащее раму с жестко закрепленными в ее центральной части вертикальными направляющими, шарнирно закрепленные на поперечинах рамы клещевины, расположенную продольно
пластиной 9. Крюк 8 нижней гранью 10 и 25 над рамой и связанную с подъемом машины пазом И взаимодействует с осью 12, при- траверсу, кинематически связанную конца- крепленной к направляющим 13. На парал- ми с верхними концами клещевин, жестко лелограмме 2 закреплены кронштейны 14, закрепленные на ее боковых частях и вертикально расположенные кроншчейны, размещенные в вертикальных направляющих рамы, орган раскрытия клещевин, механизм фиксации положения, включающий щарнир- но закрепленный на траверсе крюк, жестко связанную с рамой в центральной ее части поперечно горизонтальную ось для взаимодействия с крюком, отличающееся тем, что, с целью повыщения надежности, на поперечных сторонах вертикальных направляющих выполнены наклонные от вертикальной оси симметрии пары, а устройство снабжено тягами, расположенными средними
да я крюк 8, при этом ось 12 выходит из па- 40 частями в наклонных пазах вертикальных за 11, освобождая пластину 9, которая пово- направляющих продольно в одной плоскости рачивается до упора 17, перекрывая- паз 11.и жестко закрепленными своими концами на
Тяги 15 в этот момент находятся в крайнемверхних частях соответствующих клещевин
нижнем положении и не препятствуют пере- для взаимодействия с нижними концами мещению кронштейнов 14 вниз. При подъе- кронштейнов.
Механизм фиксации положения клещевин 4 содержит шарнирно установленный на траверсе 1 крюк 8, снабженный поворотной
перемещающиеся в направляющих 13 и взаимодействующие с тягами 15, соединяющи- ми попарно свободные конЦы параллельных клещевин 4. Тяги 15 проходят через наклонные пазы 16, выполненные по образующей перемещения тяг 15 на поперечных сторонах вертикальных направляющих 13. На крюке 8 выполнен упор 17 для ограничения хода , поворотной пластины 9.
Грузозахватное устройство работает следующим образом.
При опускании его на груз шарнирный параллелограмм 2 складывается, освобожме захвата клещевины 4 захватывают груз, при этом тяги 15 перемещаются в крайнее верхнее положение.
При опускании устройства с грузом шарнирный параллелограмм 2 складывается, при этом кронштейны 14, перемещаясь в вертикальных направляющих 13, нижними концами доходят до тяг 15, находящихся в крайнем верхнем положении и выполняющих роль ограничителей хода. Тяги 15 препятствуют дальнейщему перемещению кронштейнов 14 и крюка 8 вниз независимо от лродолжающегося опускания грузозахватного органа. После захода оси 12 в паз 11 крюка 8 устройство поднимают, при этом клещевины 4 разжимаются посредством пружин
6. Груз освобождается, а тяги 15 занимают крайнее нижнее положение.
Формула изобретения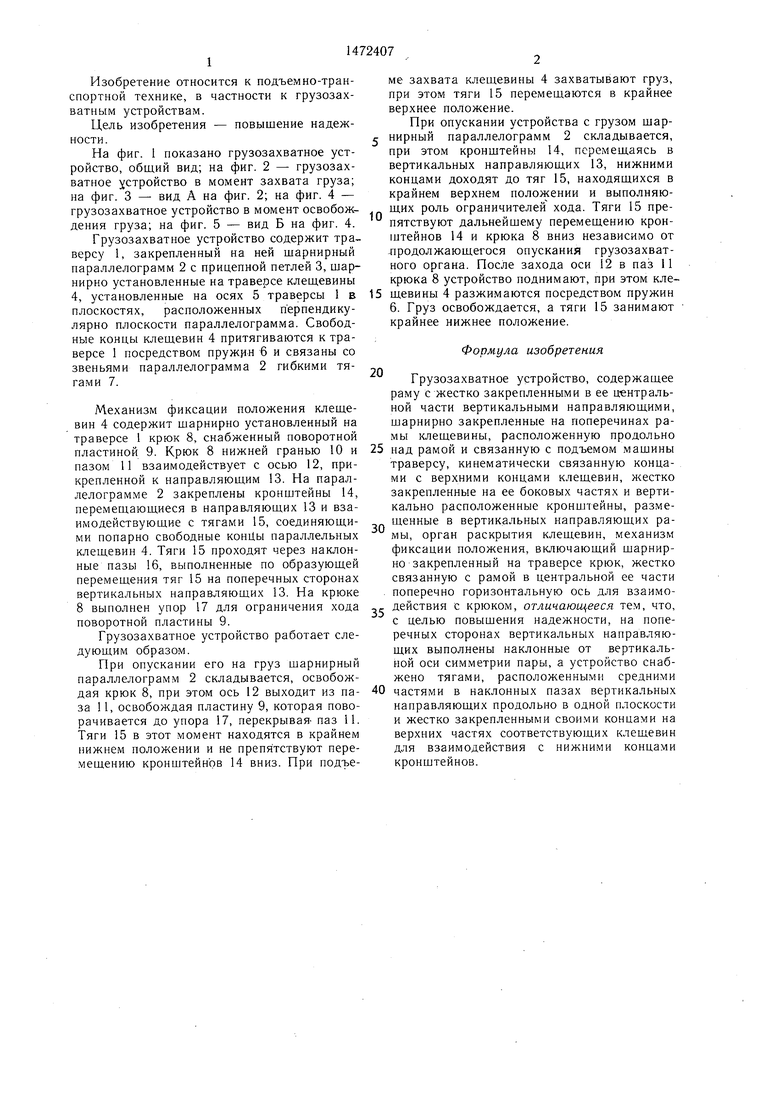
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват | 1982 |
|
SU1008137A1 |
| Грузозахватная балансирная траверса В.П.Зайцева и ее варианты | 1980 |
|
SU984975A1 |
| Грузозахватное устройство | 1989 |
|
SU1720986A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Клещевой захват | 1980 |
|
SU910525A1 |
| Автоматический захват инженера И.В.Илыка | 1979 |
|
SU908733A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| УРАВНОВЕШЕННЫЙ КРАНОВЫЙ ВИЛОЧНЫЙЗАХВАТ | 1971 |
|
SU420535A1 |
| Захват-кантователь | 1980 |
|
SU922032A1 |
Изобретение относится к подъемно-транспортному оборудованию ,в частности, к грузозахватным устройствам. Целью изобретения является повышение надежности. Грузозахватное устройство содержит клещевины 4, вертикальные направляющие 13 для кронштейнов 14 траверсы 1, в которых выполнены наклонные от вертикальной оси симметрии пазы 16 для расположения тяг, связывающих верхние части соответствующих клещевин 4. Тяги ограничивают ход кронштейнов 14 и ход крюка 8, предотвращая тем самым расфиксацию клещевин 4. 5 ил.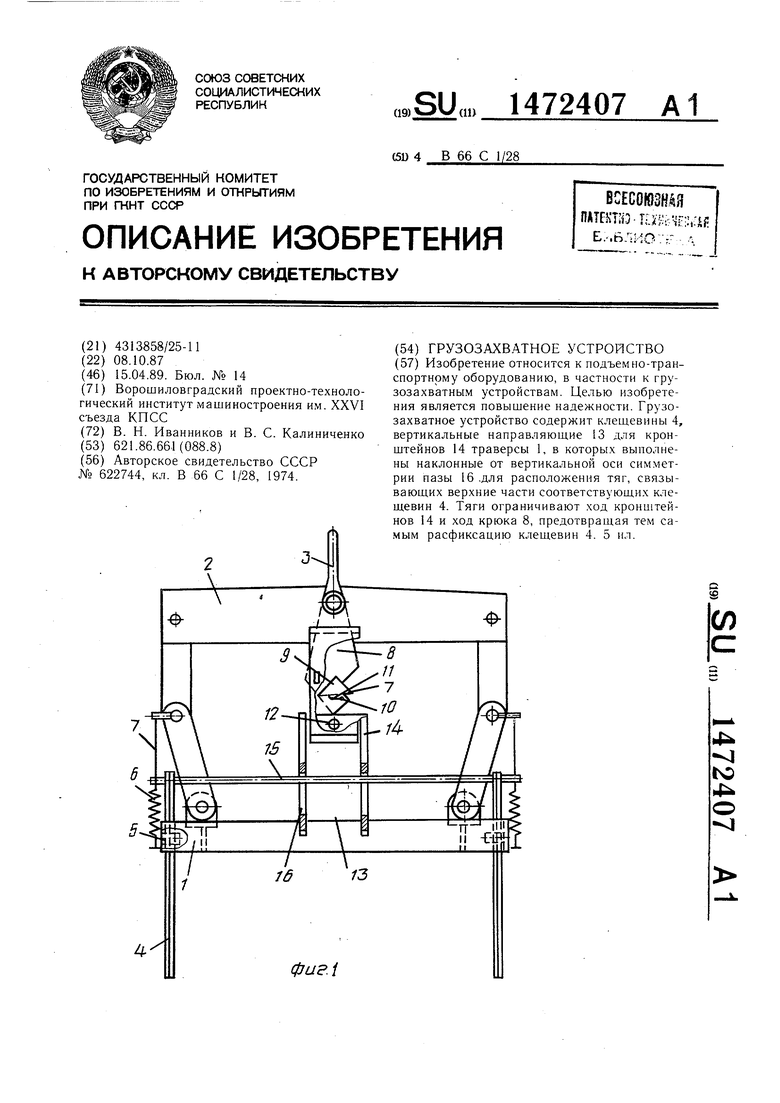
(раг.:5
3
73
7
4
фигЛ
Вид Б
| Автоматический захват | 1974 |
|
SU622744A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
