/уУ Тут Т f//f/7/ // sffTfff/fft ЯМрГХ&
nf
ffr/fir 4/7 «W
J77
15 tf
ЯМрГХ&
J77
15 tf
314
, Изобретение относится к судостроению, в частности к судам для завозки и перекладки якорей.
Цель изобретения - повышение эффективности и безопасности использования судна для завозки и перекладки якорей.
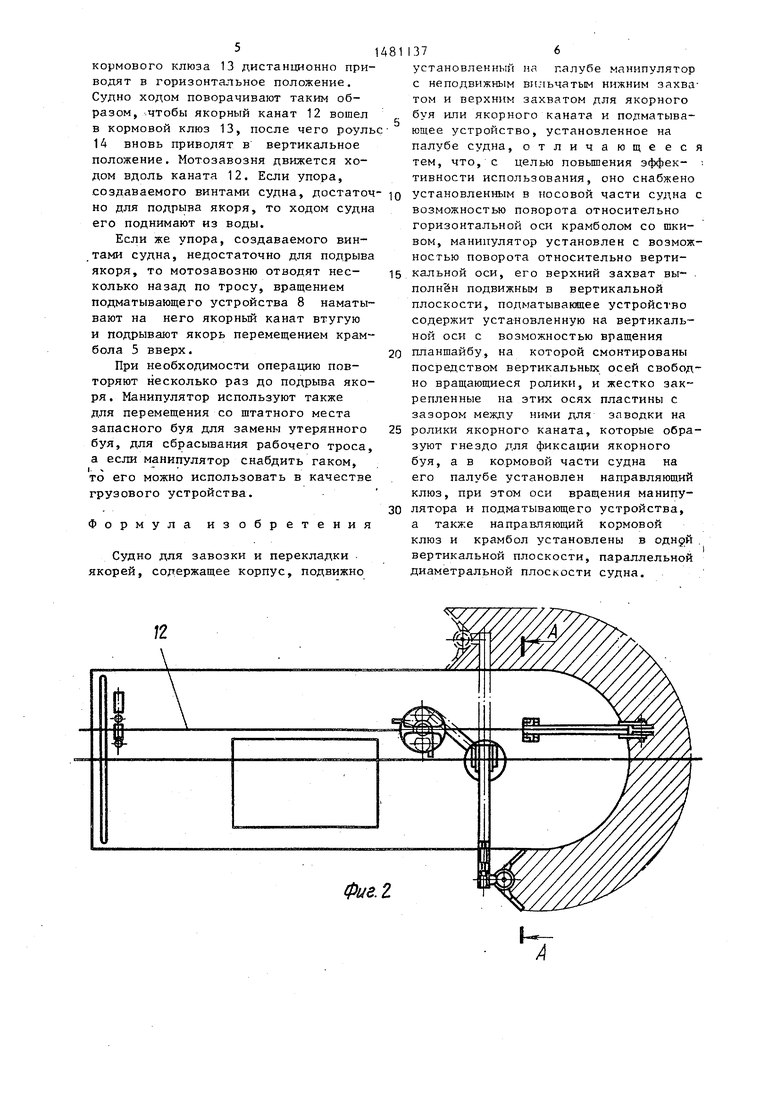
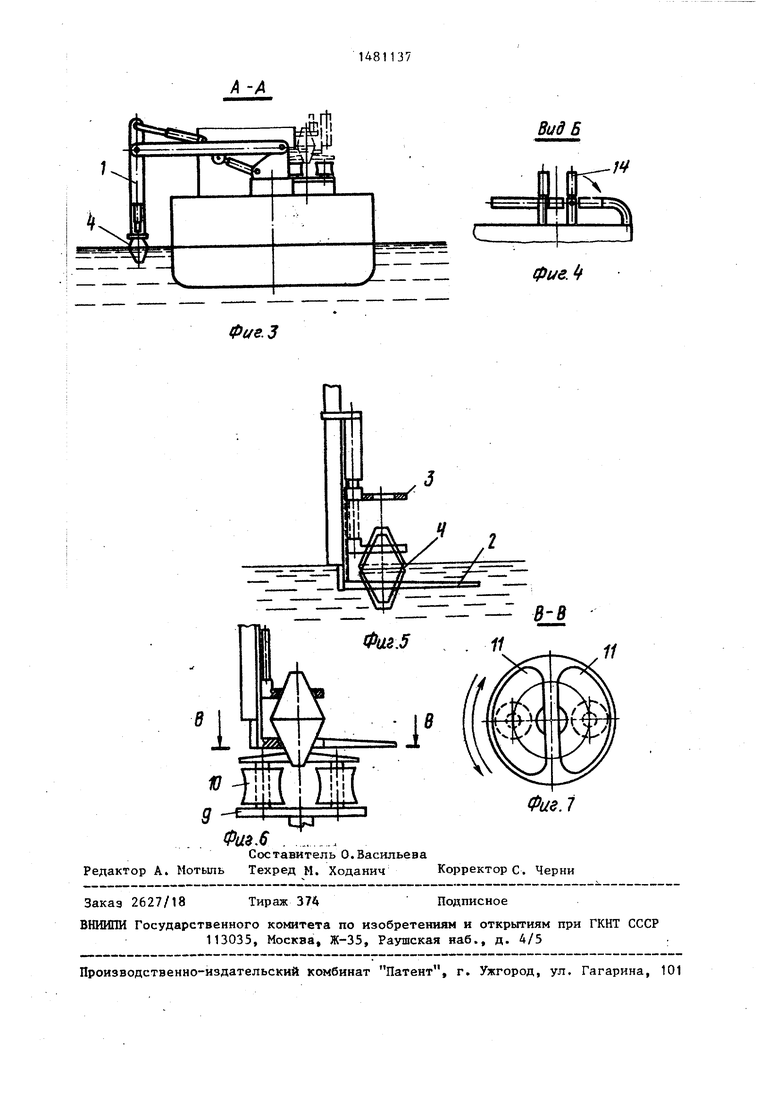
На фиг. 1 изображено судно, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг, 2; на фиг. 4 - вид Б на фиг. 1; на фиг. 5 - положение буя в мани- пуляторе; на фиг. 6 - фиксация буя в гнезде подматывающего устройства; на фиг. 7 - разрез В-В на фиг. 6.
Судно для завозки и перекладки якорей содержит манипулятор 1, снабженный неподвижным 2 и подвижным 3 захватами и способный поворачиваться |в горизонтальной плоскости на 360 ° |для увеличения зоны захвата буя 4, крамбол 5 со шкивом 6, имеющий воз- можность перемещения в вертикальной ,плоскости посредством гидроцилиндров 7 для подрыва якоря, тяговый эле- мент - подматывающее устройство 8, содержащее вращающуюся в обоих направлениях относительно вертикальной оси планшайбу 9S на которой разме- |щены два свободно вращающихся ролика 1 10, снабженных неподвижными относи- тельно их осей пластинами 11, образующими гнездо для фиксации якорног
буя 4. Между пластинами имеется зазор для заводки якорного каната 12. На корме установлен клюз 13 с дистанционно убирающимся н вертикальным роульсом 14 для направления движения якорного каната 12, Пуйреп обозначен позицией 15, а якорь - позицией 16.
Работа судна при подрыве якоря за буй осуществляется следующим образом.
При подходе судна к бую 4 манипулятором 1 опускают неподвижный вильчатый захват 2 так, чтобы он оказался
ниже ватерлинии, подвижный захват 3 при этом поднят в верхнее положение
Работая винтами и рулями судна, а также изменяя положение вильчатого захвата 2, манипулятором 1 добиваютс попадания буя 4 в неподвижный вильчатый захват 2 и фиксируют в нем буй подвижным захватом 3. Манипулятором 1 поднимают буй из воды и, обнося его через нос судна, заводят буйреп 15 в ручей шкива 6 крамбола 5, нахо
5
5
0
0
5
дящегося в нижнем положении, и перемещают его к подматывающему устройству 8, а затем устанавливают в гнез- , до подматывающего устройства 8. При этом буй удерживается захватами 2, и 3. Затем включают подматывающее устройство на выбирание буйрепа.
Если якорь 16 находится в грунте Q не слишком глубоко и тягового усилия, развиваемого устройством 8, достаточно для его подрыва, буйреп 15 выбирается на ролики 10, якорь поднимается до шкива 6, крамбол 5 переводится в верхнее положение, а якорь в таком положении переводят на новое место укладки.
Если якорь глубоко ушел в грунт и тягового усилия подматывающего уст- 0 ройства 8 недостаточно, то на ролики 10 устройства 8 выбирают максимально возможную по тяговой характеристике длину буйрепа, после чего производят стопорение устройства 8, например, посредством гидрозамка. Крамболу 5 сообщают вертикальное движение, подрывая якорь. При необходимости крамбол вновь опускают, после чего производят подмотку буйрепа и производят повторный подрыв якоря. Операцию возможно повторять необходимое число раз.
По приходе на новое место укладки якоря подматывающее устройство вращают в обратную сторону, обеспечивая отдачу якоря.
Для предотвращения чрезмерного раскручивания подматывающее устройство может быть приторможено при отдаче якоря , например, путем дросселирования слива рабочей жидкости - гидромотора привода.
После освобождения роликов подматывающего устройства от шлагов 5 буйрепа (длина буйрепа всегда сущест- венно больше глубины укладки якоря), буй, который удерживается захватами, выносят манипулятором за борт и отдают.
Работа судна при подрыве якоря за якорный канат осуществляется следующим образом.
Неподвижным вильчатым захватом 2 манипулятора 1 якорный канат 12 поднимают над носовой оконечностью судна и укладывают в ручей шкива 6$ находящегося в нижнем положении, и вводят в зазор подматывающего устройства 8. Вертикальный роульс 14
5
0
51
кормового клюза 13 дистанционно приводят в горизонтальное положение. Судно ходом поворачивают таким образом, чтобы якорный канат 12 вошел в кормовой клюз 13, после чего роуль 14 вновь приводят в вертикальное положение. Мотозавозня движется ходом вдоль каната 12. Если упора, создаваемого винтами судна, достаточ но для подрыва якоря, то ходом судна его поднимают из воды.
Если же упора, создаваемого винтами судна, недостаточно для подрыва якоря, то мотозавозню отводят нес- колько назад по тросу, вращением подматывающего устройства 8 наматывают на него якорный канат втугую и подрывают якорь перемещением крамбола 5 вверх.
При необходимости операцию повторяют несколько раз до подрыва якоря . Манипулятор используют также для перемещения со штатного места запасного буя для замены утерянного буя, для сбрасывания рабочего троса, а если манипулятор снабдить гаком, то его можно использовать в качестве грузового устройства.
Формула изобретения
Судно для завозки и перекладки якорей, содержащее корпус, подвижно
5 0
5
0
1376
установленный на г.алубе манипулятор с неподвижным вильчатым нижним захва том и верхним захватом для якорного буя или якорного каната и подматывающее устройство, установленное на палубе судна, отличающееся тем, что, с целью повышения эффективности использования, оно снабжено установленным в носовой части судна с возможностью поворота относительно горизонтальной оси крамболом со шкивом, манипулятор установлен с возможностью поворота относительно вертикальной оси, его верхний захват вы- полн ён подвижным в вертикальной плоскости, подматывающее устройство содержит установленную на вертикальной оси с возможностью вращения планшайбу, на которой смонтированы посредством вертикальных осей свободно вращающиеся ролики, и жестко закрепленные на этих осях пластины с зазором между ними для заводки на ролики якорного каната, которые образуют гнездо для фиксации якорного буя, а в кормовой части судна на его палубе установлен направляющий клюз, при этом оси вращения манипулятора и подматывающего устройства, а также направляющий кормовой клюз и крамбол установлены в однрн вертикальной плоскости, параллельной диаметральной плоскости судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подматывающее устройство судна для завозки и перекладки якорей | 1989 |
|
SU1752646A1 |
| Транспортное средство для завозки якорей земснарядов | 1977 |
|
SU695889A1 |
| ЯКОРНИЦА | 2024 |
|
RU2828998C1 |
| Устройство для перекладки рабочих якорей земснарядов | 1988 |
|
SU1588628A1 |
| Устройство для стабилизации лихтеров в кормовом проеме лихтеровоза | 1978 |
|
SU742251A1 |
| УСТРОЙСТВО для ПОДРЕЗКИ ЯКОРНЫХ ТРОСОВ и ПОДРЫВА ЯКОРЕЙ ЗЕМСНАРЯДОВ | 1969 |
|
SU241299A1 |
| Судовое грузовое устройство для подъема и перекладки якорей | 1976 |
|
SU610717A1 |
| Тросозаглубитель | 1985 |
|
SU1291489A1 |
| Автоматическое якорное устройство для безэкипажного катера | 2022 |
|
RU2777140C1 |
| Устройство для перекладки якорей земснаряда | 1978 |
|
SU751707A1 |
Изобретение относится к судну для завозки и перекладки якорей. Цель изобретения - повышение эффективности и безопасности использования судна для завозки и перекладки якорей. Предлагаемое судно для завозки и перекладки рабочих якорей содержит корпус, энергетическую установку, подвижно установленный на палубе манипулятор 1 с вильчатым неподвижным нижним захватом и верхним захватом для якорного буя или якорного каната, подматывающее устройство 8, установленное на палубе судна, и установленный в носу крамбол 5 со шкивом 6. Манипулятор 1 установлен с возможностью кругового поворота в горизонтальной плоскости, его верхний захват выполнен подвижным в вертикальной плоскости. Подматывающее устройство 8 содержит установленную на вертикальной оси с возможностью вращения планшайбу, на которой смонтированы посредством вертикальных осей два свободно вращающихся ролика и жестко закрепленные на этих осях пластины с зазором между ними для заводки якорного каната 12, которые образуют гнездо для фиксации якорного буя 4. В кормовой части судна на его палубе установлен клюз 13 с вертикальным роульсом. При этом крамбол 5, манипулятор 1, подматывающее устройство 8 и кормовой клюз 13 установлены в одной вертикальной плоскости, расположенной параллельно диаметральной плоскости судна. 7 ил.
Фиг. Z
Фие.З
Физ.6
Составитель О.Васильева Редактор А. Мотыль Техред М. Ходанич
Заказ 2627/18
Тираж 374
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Вид Б
L
К
фие.4
//
Фае.7
Корректоре. Черни
Подписное
| Устройство для подъема и подачи якоря | 1980 |
|
SU935367A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
