10
31482870
Изобретение относится к устройстам для транспортирования изделий чеез ванны с жидкостью при различной технологической обработке изделий, в частности при моечной очистке,
Цель изобретения - повышение производительности устройства,
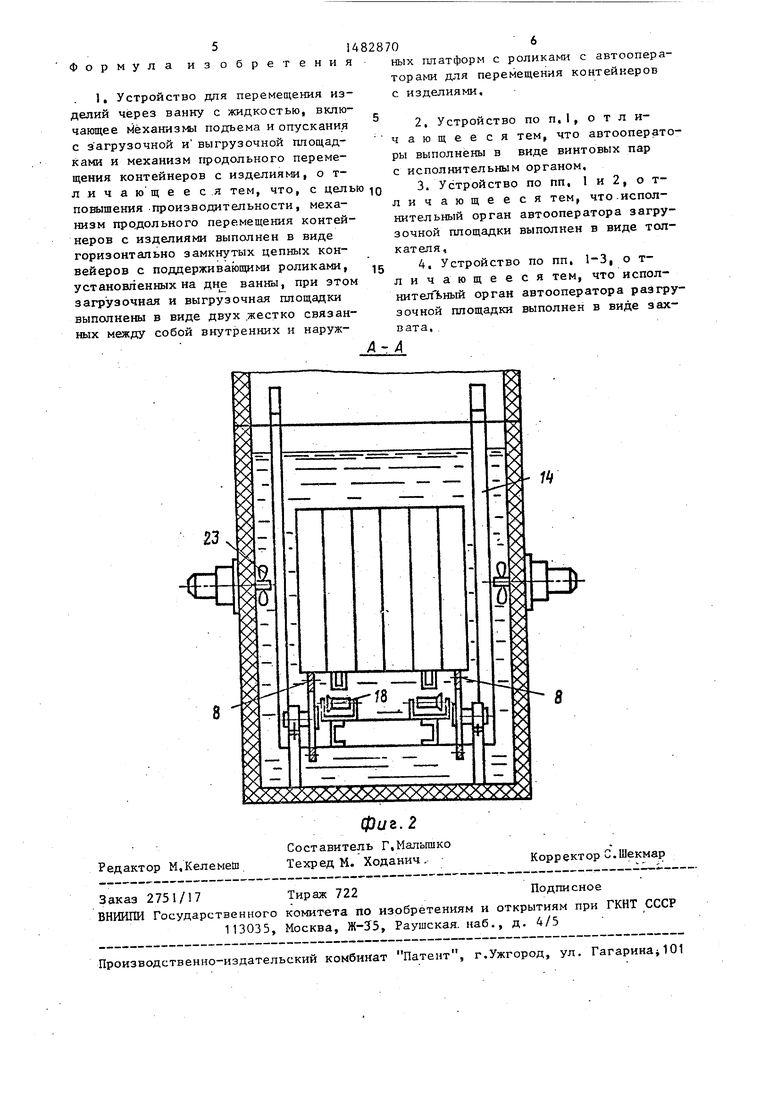
На фиг,1 схематично показано устройство для перемещения изделий через ванну, общий вид; на фиг,2 - разрез А-А на фиг.1.
Устройство для перемещения иэде- лий через ванну с жидкостью содержит ванну 1 с крышками 2, кожух 3 с окном 4 для прохода контейнеров 5 с изделиями внутрь ванны 1, установленный в зоне загрузки кожух 6 с окном 7 для выхода контейнеров) 5 из ванны 1, и установленный на дне ванны 1 20 механизм продольного перемещения кон15
тейнеров с изделиями, выполненный в виде горизонтально замкнутых цепных конвейеров 8 с поддерживающими роликами 9. У окна 4 размещена загрузочная площадка 10, а у окна 7 размещена разгрузочная площадка 11, Загрузочная и разгрузочная площадки 10 и 11 установлены на механизмах 12 и 13 подъема и опускания и выполнены в виде двух жестко связанных между со- /бой внутренних и наружных платформ 14и 15, 16 и 17 с роликами 18 и ав .тооператорами 19 и 20 для перемещения контейнеров с изделиями.
Автооператоры 19 и 20 выполнены в виде винтовых пар, причем автооператор загрузочной площадки 10 имеет исполнительный орган в виде толкателя 21, а автооператор 20 разгрузочной площадки 11 - исполнительный орган в виде захвата 22.
На внутренних боковых стенках ван40 22 начнет двигаться до конечного выключателя 34, установленного таким образом, чтобы захват 22 зашел в зацепление с контейнером 5, Дойдя до конечного выключателя 34, захват
ны 1 установлены активаторы 23 для создания направленного потока жидкое- jg 22 переключит направление вращения ти и подогреватели 24 для нагревадвигателя автооператора 20, и захват 22 начнет двигаться в обратном направлении. При движении захвата 22 в обратном направлении он переместит контейнер 5 с внутренней платформы 15 на наружную платформу 17.
Захват 22, дойдя до конечного выключателя 35, полностью переместит контейнер 5 на наружную платформу 17 и отключит двигатель автооператора 20, а разгрузочная площадка 11
обрабатывающей жидкости 25, Для автоматического управления работой устройства оно имеет конечные выключатели 26 - 35,
следующим обУстройство работает разом,
При включении механизма 12 подъема и опускания загрузочная площадка 10 с установленным на роликах 18 контейнером 5 с изделиями движется вверх до конечного выключателя 26, Включается автооператор 19 загрузочной площадки 10, и контейнер 5 с из50
55
вместе с установленным на ней конт.еи- нером 5 механизмом 13 подъема-опускания опустится вниз.
0
0
делиями толкателем 21 перекатывается на внутреннюю платформу 14. Толкатель 21 автооператора 19 загрузочной площадки 10, дойдя до конечного выключателя 28, переключит направление вращения двигателя автооператора 19, а толкатель 21 начнет двигаться в обратном направлении. Дойдя до конечного выключателя 29, двигатель автооператора 19 отключится, а загрузочная площадка 10 механизмом 12 подъема опустится вниз. Внутренняя платформа 14 (фиг,2) с установлен5 ным на ней контейнером 5 с изделиями опускается ниже верхних ветвей движущихся конвейеров 8, и таким образом контейнер 5 с изделиями устанавливается на конвейеры 8 и движется с ними через ванну 1 к зоне выгрузки,
Конечный выключатель 30 служит
для блокировки механизма 12 подъема
/и опускания, т.е. механизм 12 L/
5 подъема и опускания не включится до тех пор, пока контейнер 5 с изделиями полностью не выйдет из зоны загрузки. Контейнер 5 с изделиями, дойдя до конечного выключателя 31, включит
0 механизм 12 подъема и опускания выгрузочной площадки 1 1 , и она, двигаясь вверх внутренней платформой 15, снимет контейнер 5 с изделиями с конвейеров 8, Выгрузочная площадка 11
г вместе с контейнером 5, установленным на внутренней платформе 15, будет двигаться вверх до конечного выключателя 32, Включается автооператор 20 выгрузочной площадки 11, и захват
0 22 начнет двигаться до конечного выключателя 34, установленного таким образом, чтобы захват 22 зашел в зацепление с контейнером 5, Дойдя до конечного выключателя 34, захват
g 22 переключит направление вращения двигателя автооператора 20, и захвместе с установленным на ней конт.еи- нером 5 механизмом 13 подъема-опускания опустится вниз.
-У -. - Ln.
aft
ОО ХХХХХХХХХ уУУУ Лл
n.
afta
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия Свиноренко для технологической обработки радиоэлементов | 1986 |
|
SU1426755A1 |
| Автоматическая линия для нанесения покрытий на изделия погружением в ванны | 1986 |
|
SU1330056A1 |
| Установка для ионообменной обработки стеклоизделий | 1986 |
|
SU1379260A1 |
| Утсановка для окраски изделий | 1975 |
|
SU651854A1 |
| ПНЕВМАТИЧЕСКАЯ ТРАНСПОРТНАЯ УСТАНОВКА | 2005 |
|
RU2291830C1 |
| Линия для обработки изделий | 1982 |
|
SU1073174A1 |
| Линия для обработки изделий | 1985 |
|
SU1313780A1 |
| Устройство для укладки в пакет плоских изделий | 1987 |
|
SU1579874A1 |
| Автооператор для металлорежущих станков | 1983 |
|
SU1144844A2 |
| Карусельная линия для обработки изделий в ваннах | 1990 |
|
SU1770235A1 |
Изобретение относится к устройствам транспортирования изделий. Цель изобретения - повышение производительности. Устройство включает механизмы 12 и 13 подъема и опускания с загрузочной 10 и разгрузочной 11 площадками (П) и механизм продольного перемещения контейнеров с изделиями. Последний выполнен в виде горизонтально замкнутых цепных контейнеров 8 с поддерживающими роликами 9, установленных на дне ванны 1. При этом П 10 и 11 выполнены в виде двух жестко связанных между собой внутренних 14, 15 и наружных 16 и 17 платформ с роликами 18 и автооператорами 19 и 20 для перемещения контейнеров с изделиями. Автооператоры 19 и 20 выполнены в виде винтовых пар с исполнительными органами. Исполнительный орган П 10 выполнен в виде толкателя 21, а исполнительный орган П 11 в виде захвата 22. При включении механизма 12 П 10 с контейнером 5 движется вверх. Включается автооператор N19, и контейнер 5 с изделиями толкателем 21 перекатывается на платформу 14. Толкатель 21 переключает направление вращения двигателя автооператора 19 и начинает двигаться в обратном направлении. Двигатель автооператора 19 отключается, и П 10 опускается вниз. Платформа 14 с контейнером 5 опускается ниже верхних ветвей движущихся контейнеров 8, и контейнер 5 устанавливается на контейнеры 8 и движется через ванну 1. 3 з.п.ф-лы, 2 ил.
| Транспортирующее устройство моечной машины | 1982 |
|
SU1084221A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Авторское свидетельство СССР | |||
| Устройство для обработки изделий в технологической жидкости | 1983 |
|
SU1123965A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| . | |||
