314845534
призмами 8 входит шток 15 гидроци- ет рычаги 10 и сводит призмы 8. За- линдра. При опускании приспособления- тем шток 15 опускается и буртиком спутника 1 под действием его веса и зажимает призмы 8 через корпус на веса детали- толкатель I1 повора ива- основании рабочей позиции. 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Металлорежущий станок | 1990 |
|
SU1830333A1 |
| Автоматическая линия спутникового типа | 1985 |
|
SU1505757A1 |
| ПОЛУАВТОМАТИЧЕСКАЯ ЛИНИЯ СБОРКИ КАРДАННЫХ ВАЛОВвс?^со;озн^.ПАШи1и-Г..л;';Г'''Б^^БЛИО: ^.•'-' | 1973 |
|
SU366054A1 |
| Линия спутникового типа | 1989 |
|
SU1646798A1 |
| Устройство для автоматической смены спутников на металлорежущем станке | 1986 |
|
SU1400851A1 |
| Устройство для смены,фиксации и зажима приспособлений-спутников | 1980 |
|
SU867604A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ПРОТЯГИВАНИЯ ПАРАЛЛЕЛЬНЫХ НАРУЖНЫХ ПОВЕРХНОСТЕЙВС':СС.ОЗНАЯ I | 1973 |
|
SU366939A1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| Линия для сборки узлов | 1989 |
|
SU1722771A1 |
| Многопозиционный агрегатный станок | 1986 |
|
SU1340991A1 |
Изобретение относится к обработке материалов резанием, а именно к устройствам для установки приспособлений-спутников в автоматических линиях. Изобретение позволяет сократить время зажима приспособления-спутника. В корпусе 7 механизма зажима размещены с возможностью перемещения навстречу друг другу две призмы 8, в пазах 22 которых размещены вертикальные полки 24 Г-образных рычагов 10, оси 9 которых жестко связаны с корпусом 7 механизма зажима, а горизонтальные полки рычагов 10 установлены в пазу 23 толкателя 11, подпружиненного относительно корпуса 7. Причем рычаг 10 и верхняя часть толкателя 11 размещены в полости 12 приспособления-спутника 1. Нижняя подпружиненная часть толкателя 11 расположена в пазу корпуса 7 и выступает в верхнем поднятом положении приспособления-спутника 1 за пределы нижней границы корпуса. Призмы 8 выполнены с возможностью охвата штока 15 гидроцилиндра в месте его проточки 16, а буртики 17 штока 15 выполнены с возможностью взаимодействия с опорными поверхностями 21 призм 8. Перемещаемое по роликам приспособление-спутник 1 на рабочей позиции поступает на вертикально-подвижные участки направляющих, расположенных под каждым роликом приспособления-спутника 1. При этом в зазор между призмами 8 входит шток 15 гидроцилиндра. При опускании приспособления-спутника 1 под действием его веса и веса детали толкатель 11 поворачивает рычаги 10 и сводит призмы 8. Затем шток 15 опускается и буртиком зажимает призмы 8 через корпус на основании рабочей позиции. 5 ил.
Изобретение относится к обработке материалов резанием, а именно к устройствам для установки приспособ- лений-спутников в автоматических и поточно-механизированных линиях.
Цель изобретения - уменьшение времени на закрепление спутника.
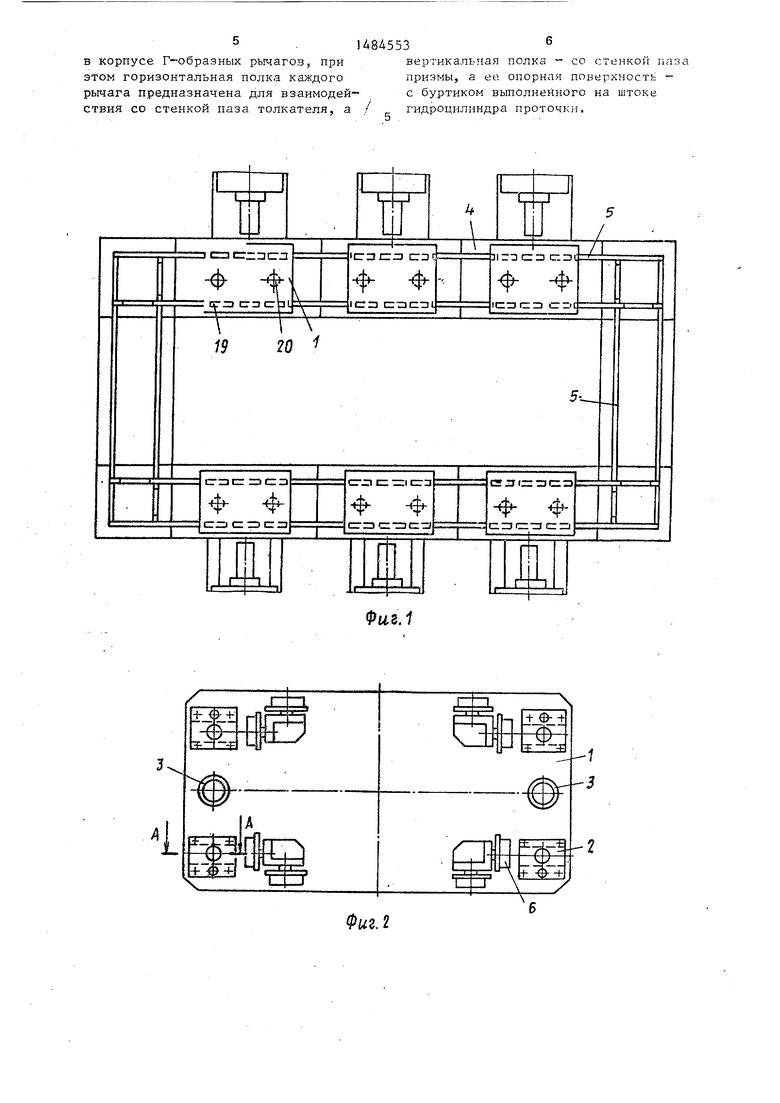
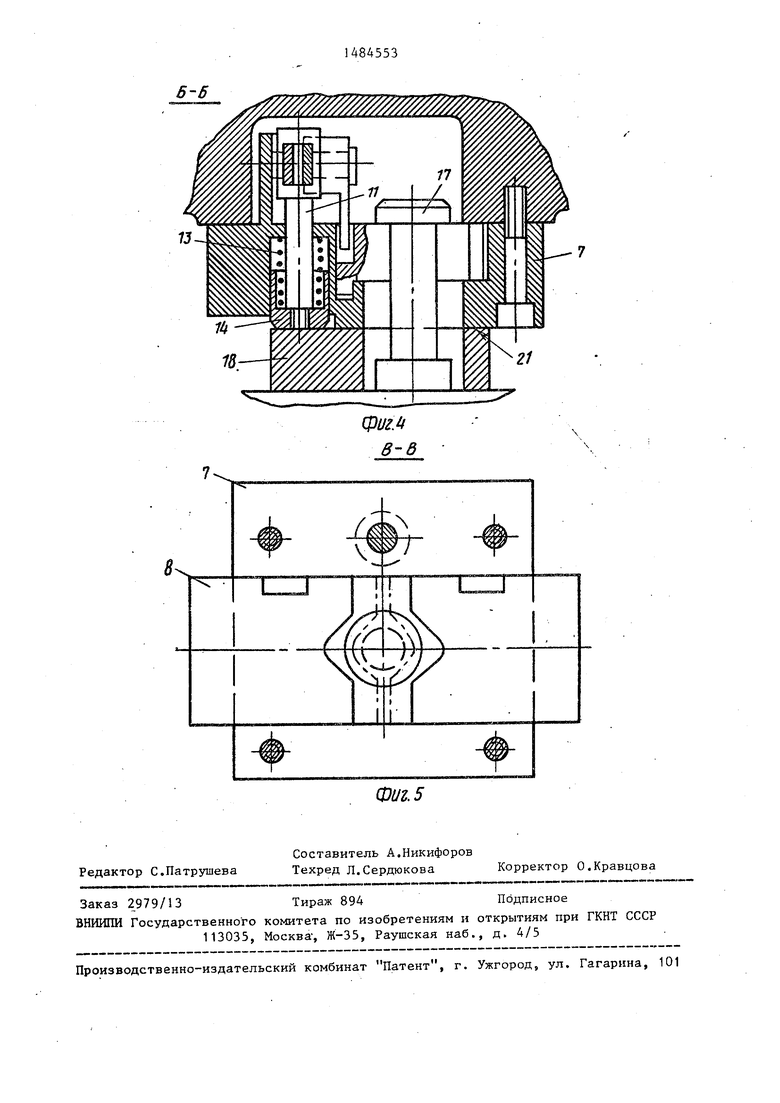
На фиг.1 изображена линия, общий вид; на фиг„2 «- приспособление-спут- ник, вид снизу; на фиг.З - разрез А-А на фиг.2; на фиг.4 - разрез В-Б на фиг,35 на фиг,5 - разрез В-В на фиг.З (призма в разведенном состоянии).
Приспособление-спутник 1 имеет четыре механизма 2 зажима, закреп- ленных по углам спутника 1, а также две втулки 3 для фиксации на основании рабочей позиции 4. Спутник 1 может перемещаться по направляющим 5 вдоль и поперек автоматической линии на опорных роликах 6. В корпусе 7 механизма зажима имеются две подвижные призмы 8, связанные через установленные на осях 9 Г-образные рычаги 10 с толкателем 11. Рычаги 10 и толкатель 11 размещены в полости 12 приспособления-спутника 1. Пружина 13 через втулку 14 выжимает толкатель 11 из корпуса 7 и поддерживает призмы 8 в раскрытом состоянии.
В основании рабочей позиции 4 смонтирован гидроцилиндр, шток 15 которого имеет проточку 16 и буртик 17. Базирование спутника 3 производи ся на базовые платики I8 рабочей по- зиции 4. Спутник 1 перемещается по направляющим 19 и фиксируется с помощью фиксаторов 20. Призмы 8 имеют опорные поверхности 21, пазы 22, а толкатель 11 - паз 23. Вертикальные полки 24 и горизонтальные полки 25 рычагов 10 входят в пазы 22 и 25.
Устройство работает следующим образом
Перемещаемый по транспортным на- правляющим 5 на опорных роликах 6 спутник 1 на рабочей позиции 4 наезжает на вертикально-подвижные участки направляющих 19, расположенные по
каждым роликом 6 спутника 1. При этом в зазор между двумя подвижными навстречу друг другу призмами 8 BXO-I дит шток 15 гидроцилиндра. Затем подвижные участки направляющих 19 опускаются и спутник 1 садится втулками 3 на неподвижные цилиндрические фиксаторы 20 на основании рабочей позиции 4. При дальнейшем опускании спутника 1 под действием собственного веса и веса детали подпружиненный толкатель 11, упираясь в базовый платик 18, поднимается вверх, при этом рьпааги 10 поворачиваются и сводят призмы 8, которые охватывают проточку 16 штока 15 таким образом, что онимеет возможность вертикального перемещения, а спутник 1 садится своими опорными поверхностями 21 на базовые платики 18 рабочей позиции 4. Затем шток 15 опускается и буртиком прижимает призмы 8, которые через корпус 7 зажимает спутник 1 на основании рабочей позиции 4.
Отжим спутника происходит в такой последовательности: сначала поднимаются штоки 15 гидроцилиндров зажима спутника, затем на подвижных участках направляющих 19 поднимается спутник 1 с одновременным разведением призм 8 в стороны. Освобожденный шток 15 гидроцилиндра опускается, чтобы не мешать движению спутника 1 по линии.
Формула изобретения
Устройство для базирования и закрепления приспособления-спутника, содержащее размещенные на спутнике механизмы зажима с корпусами и гидроцилиндрами э втулки с фиксаторами и опорные ролики, отличающее- с я тем, что, с целью уменьшения времени на закрепление спутника, каждый механизм зажима выполнен в . i виде двух призм с пазами и опорными поверхностями, подпружиненного толкателя с пазом и шарнирно установленных
514845536
в корпусе Г-образных рычагов, при вершкапьчая полка - со гтенкой ьача этом горизонтальная полка каждого призмы, а ее опорная поверхность - рычага предназначена для взаимодей- с буртиком выполненного на штоке ствия со стенкой паза толкателя, а / г гидроцилиндра проточки.
Э
А
зш
L
ihJLiJ H
Фиг.1
Q-3
-г
3
ШЯ
шп
Фиг.2
6-6
| Дащенко А.И | |||
| и др | |||
| Автоматичес-; кие линии в машиностроении | |||
| Справочник, т.2, М.: Машиностроение, 1984, с | |||
| Огнетушитель | 0 |
|
SU91A1 |
