Изобретение относится к станкостроению, а именно к автоматическим транспортно-загрузочным устройствам станков и автоматических линий, и является усовершенствованием известного устройства по авт. св. № 1423345Цель изобретения - повышение надежности устройства путем исключения попадания в гнезда ротора неправильно ориентированных деталей.
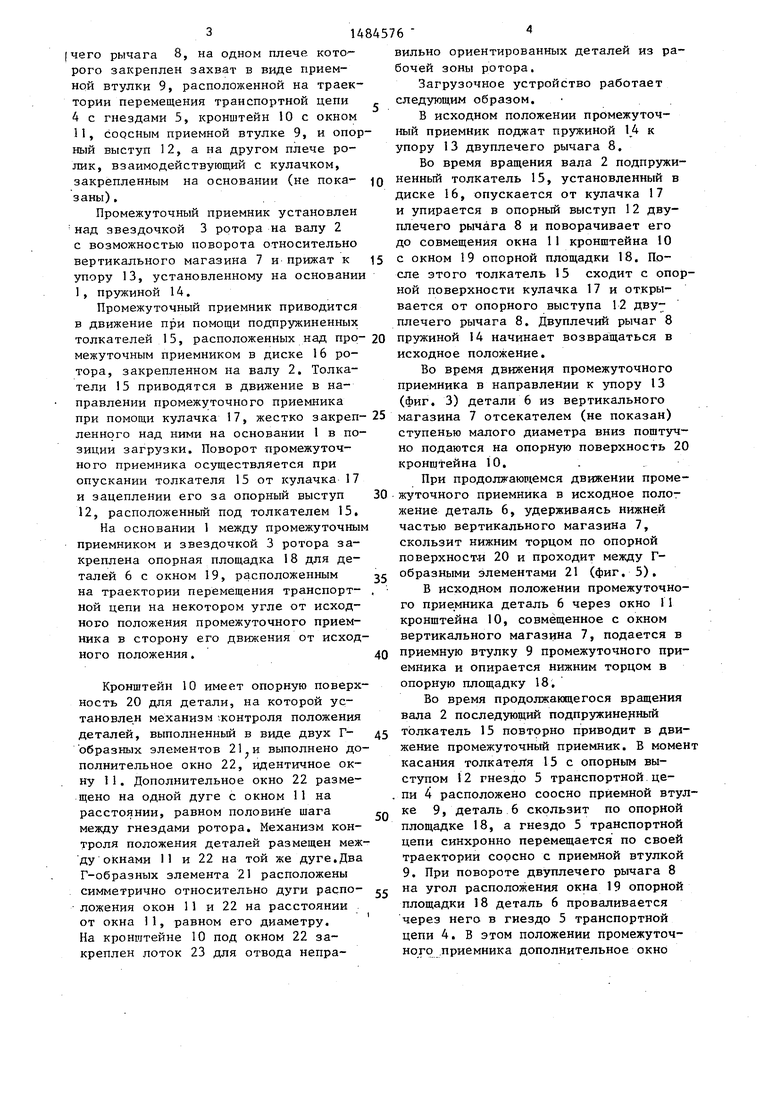
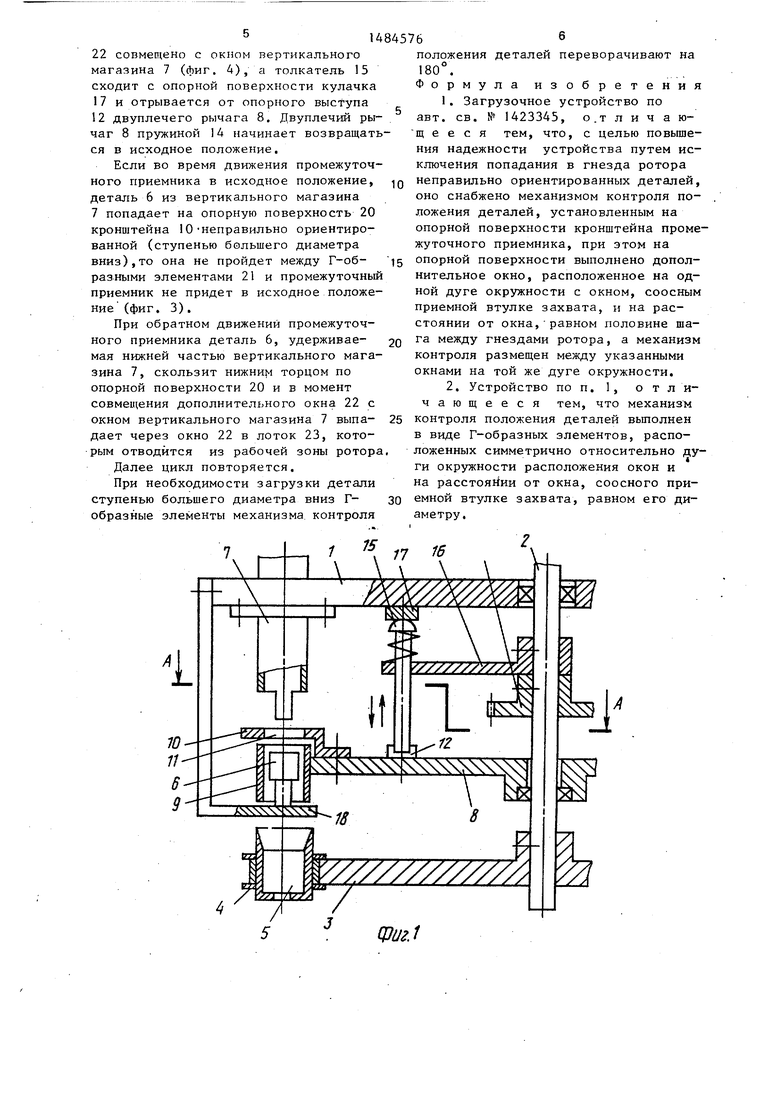
На фиг. I показано предлагаемое устройство, разрез; на фиг. 2 - разрез А-А на фиг. 1 (исходное положение промежуточного приемника при правильно ориентированной детали); на фиг. 3 - то же, при неправильно
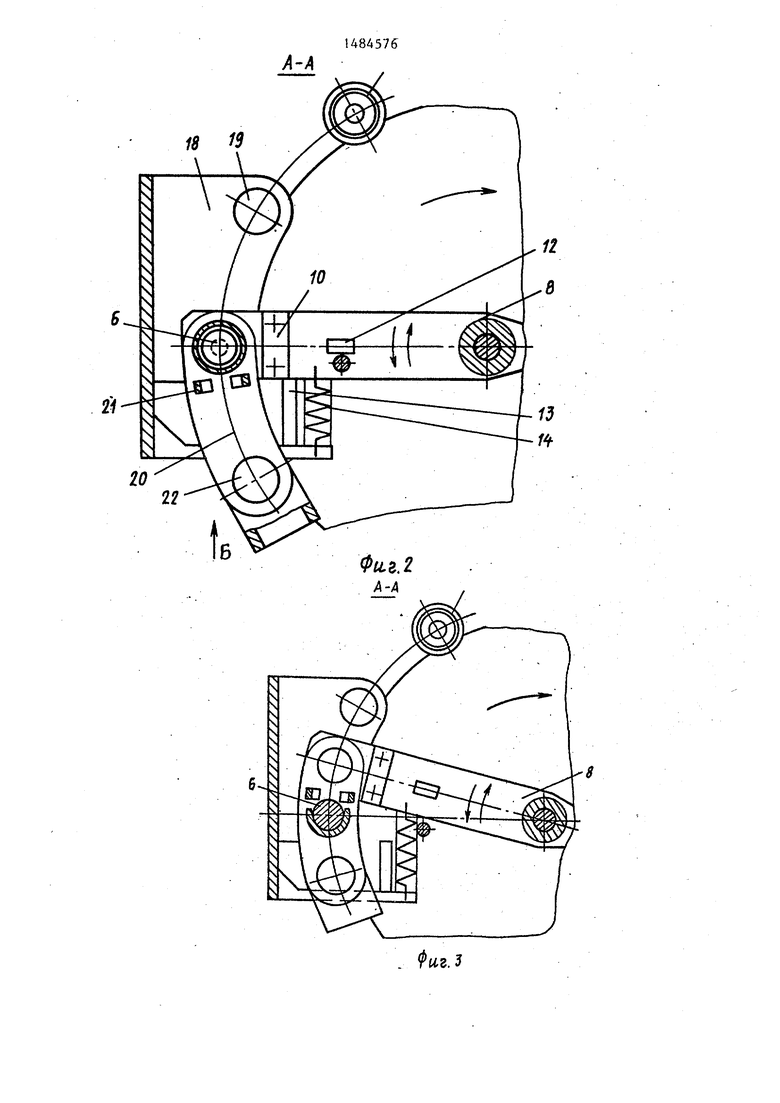
ориентированной детали; на фиг. 4 - то же, при сбросе неправильно ориентированных деталей; на фиг. 5«- вид Б на фиг. 2.
Загрузочное устройство содержит основание 1 с установленным в нем валом 2 ротора, включающего звездочку 3 и транспортную цепь 4 с гнездами (носителями) 5 для деталей 6, например ступенчатых валиков.
Вертикальный магазин 7 закреплен на основании 1 в позиции загрузки и расположен над ротором на траектории перемещения транспортной цепи 4с . гнездами (носителями) 5. Промежуточ-1 ный приемник выполнен в виде двупле4 00 4ь СЛ J
ОЭ
14)
его рычага 8, на одном плече кото-- ого закреплен захват в виде приемой втулки 9, расположенной на траектории перемещения транспортной цепи 4 с гнездами 5, кронштейн 10 с окном И, соосным приемной втулке 9, и опорный выступ 12, а на другом плече ролик, взаимодействующий с кулачком,
на основании (не пока- JQ
закрепленным заны).
Промежуточный приемник установлен над звездочкой 3 ротора на валу 2 с возможностью поворота относительно вертикального магазина 7 и прижат к упору 13, установленному на основании 1, пружиной 14.
Промежуточный приемник приводится в движение при помощи подпружиненных
15
JQ
484576 4
вильно ориентированных деталей из рабочей зоны ротора.
Загрузочное устройство работает следующим образом.
В исходном положении промежуточный приемник поджат пружиной Н к упору 13 двуплечего рычага 8.
Во время вращения вала 2 подпружиненный толкатель 15, установленный в диске 16, опускается от кулачка 17 и упирается в опорный выступ 12 двуплечего рычага 8 и поворачивает его до совмещения окна 11 кронштейна 10 с окном 19 опорной площадки 18. После этого толкатель 15 сходит с опорной поверхности кулачка 17 и открывается от опорного выступа 12 двуплечего рычага 8. Двуплечий рычаг 8
15
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1987 |
|
SU1423345A1 |
| Загрузочное устройство | 1990 |
|
SU1745507A1 |
| Загрузочное устройство | 1991 |
|
SU1815134A1 |
| Загрузочное устройство | 1978 |
|
SU749627A1 |
| Устройство для передачи изделий | 1982 |
|
SU1093486A1 |
| Ротор ориентации штучных деталей | 1980 |
|
SU906666A2 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| УСТРОЙСТВО ВТОРИЧНОЙ ОРИЕНТАЦИИ ПЛОСКИХ ДЕТАЛЕЙ | 1998 |
|
RU2129945C1 |
| Устройство для расфасовки и упаковки сыпучих материалов в коробки | 1981 |
|
SU969598A1 |
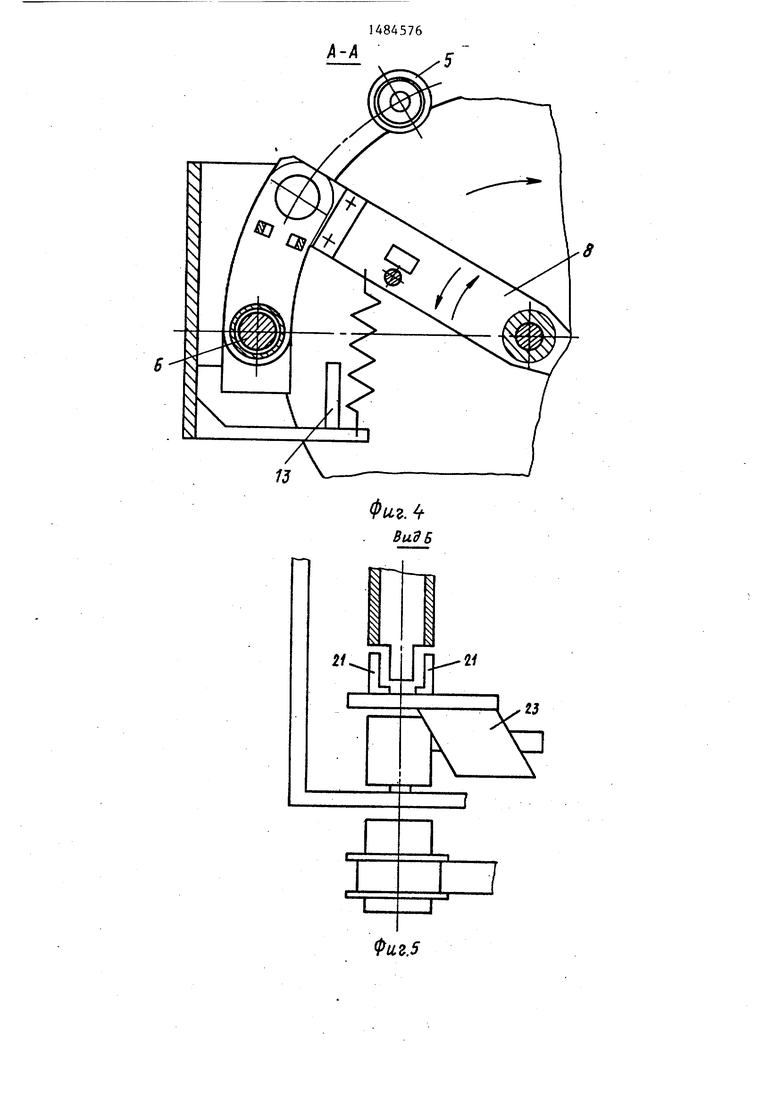
Изобретение относится к области станкостроения, а именно к автоматическим транспортно-загрузочным устройствам станков и автоматических линий. Цель изобретения - повышение надежности в работе устройства путем исключения попадания в гнезда робота неправильно ориентированных деталей. На опорной поверхности кронштейна 10 промежуточного приемника (двуплечего рычага 8) установлен механизм контроля положения деталей 6 и выполнены окна, первое из которых соосно приемной втулке захвата промежуточного приемника, а второе дополнительное окно предназначено для сброса неправильно ориентированных деталей, расположено на одной дуге окружности с первым окном и на расстоянии от него, равном половине шага между гнездами 5 ротора. При загрузке ступенчатых деталей механизм контроля их положения выполняется в виде двух симметрично расположенных Г-образных элементов. Правильно ориентированная деталь 6 проходит между Г-оборазными элементами и через промежуточный приемник попадает в гнезда ротора. Неправильно ориентированная деталь сбрасывается Г-образными элементами через второе окно в лоток. 1 з.п. ф-лы, 5 ил.
толкателей 15, расположенных над про- 20 пружиной 14 начинает возвращаться в
межуточным приемником в диске 16 ротора, закрепленном на валу 2. Толкатели 15 приводятся в движение в направлении промежуточного приемника
при помощи кулачка 17, жестко закреп- 25 магазина 7 отсекателем (не показан)
ленного над ними на основании 1 в позиции загрузки. Поворот промежуточного приемника осуществляется при опускании толкателя 15 от кулачка 17 и зацеплении его за опорный выступ 12, расположенный под толкателем 15.
На основании 1 между промежуточным приемником и звездочкой 3 ротора закреплена опорная площадка 18 для деталей 6 с окном 19, расположенным на траектории перемещения транспорт- ной цепи на некотором угле от исходного положения промежуточного приемника в сторону его движения от исходного положения.
Кронштейн 10 имеет опорную поверхность 20 для детали, на которой установлен механизм -контроля положения деталей, выполненный в виде двух Г- образных элементов 21 и выполнено дополнительное окно 22, идентичное окну 11. Дополнительное окно 22 размещено на одной дуге с окном 11 на расстоянии, равном половине шага между гнездами ротора. Механизм контроля положения деталей размещен между окнами 11 и 22 на той же дуге.Два Г-образных элемента 21 расположены симметрично относительно дуги распо- ложения окон 11 и 22 на расстоянии от окна И, равном его диаметру. На кронштейне 10 под окном 22 закреплен лоток 23 для отвода непраисходное положение.
Во время движения промежуточного приемника в направлении к упору I3 (фиг. 3) детали 6 из вертикального
ступенью малого диаметра вниз поштучно подаются на опорную поверхность 20 кронштейна 10.
При продолжающемся движении промежуточного приемника в исходное положение деталь 6, удерживаясь нижней частью вертикального магазина 7, скользит нижним торцом по опорной поверхност-и 20 и проходит между Г- образными элементами 21 (фиг. 5),
В исходном положении промежуточного приемника деталь 6 через окно 11 кронштейна 10, совмещенное с окном вертикального магазина 7, подается в приемную втулку 9 промежуточного приемника и опирается нижним торцом в опорную площадку 18.
Во время продолжающегося вращения вала 2 последующий подпружиненный толкатель 15 повторно приводит в движение промежуточный приемник. В момен касания толкателя 15 с опорным выступом 12 гнездо 5 транспортной цепи 4 расположено соосно приемной втулке 9, деталь 6 скользит по опорной площадке 18, а гнездо 5 транспортной цепи синхронно перемещается по своей траектории соосно с приемной втулкой 9. При повороте двуплечего рычага 8 на угол расположения окна 19 опорной площадки 18 деталь 6 проваливается через него в гнездо 5 транспортной цепи 4. В этом положении промежуточного приемника дополнительное окно
Фиг.1
-оF:
со
04
СЬN$
А-А
Фиг. 4
Buff6
| Загрузочное устройство | 1987 |
|
SU1423345A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
