Изобретение относится к автоматике промышленного транспорта, может быть использовано для управления конвейерами, кра- нами-штабелерами, автооператорами, тележками для межоперационных передач, оборудованием с замкнутыми трассами движения и является усовершенствованием устройства по авт.. св. № 1289764.
Цель изобретения - упрощение устройства при увеличении позиций адресования.
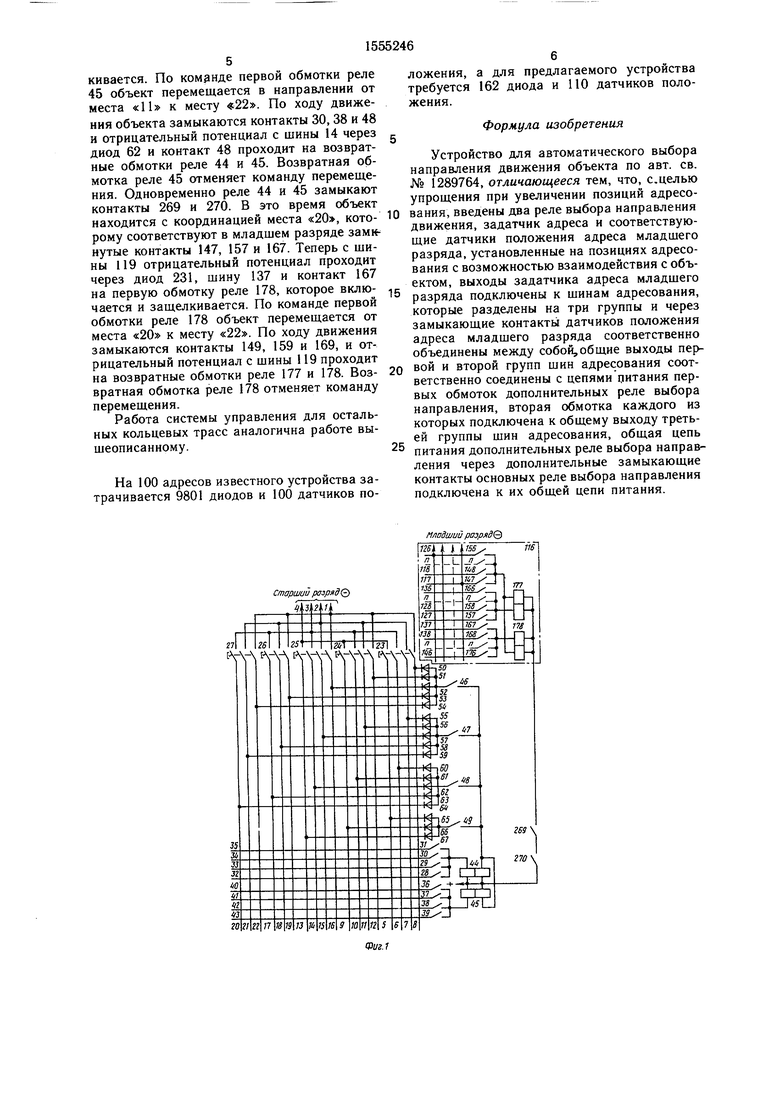
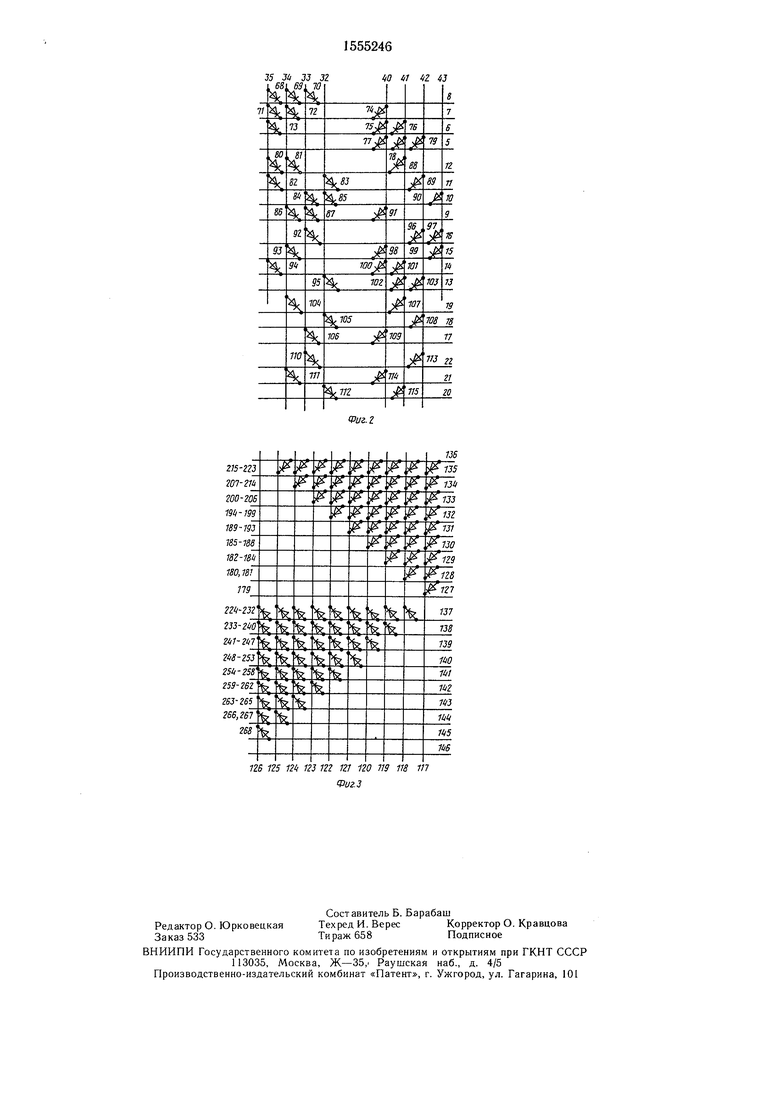
На фиг. 1 приведена электрическая принципиальная схема устройства для автоматического выбора направления движения объекта; на фиг. 2 - диодные комбинационные структуры программных матриц для различных программ при задании старших разрядов мест адреса-вызова; на фиг. 3 -
диодная комбинационная структура программной матрицы младшего разряда.
Устройство для автоматического выбора направления движения объекта состоит из задатчика адреса (не показан), блока фактического положения объекта, выполненного в виде датчиков, установленных на- позициях адресования с возможностью взаимодействия с объектом, с установкой задат- чиком и блоком, чисел старшего разряда, например десятков, определяющих позиции адресования и положения в десятичной системе счисления, шин адресования, например шин 1-4 задания адреса-вызова, шин 5-8 тупиковой трассы, шин 9-12 кольцевой четной трассы при задании адреса и шин 13- 16 при задании вызова, шин 17-19 кольцевой нечетной трассы при задании адреса
СП СП СП N9
Јь ОЭ
Ю
и шин 20-22 при задании вызова. Подсистемы шин 5-8, 9-12, 13-16, 17-19 и 20-22 через коммутационные элементы 23-27 (например, кнопки с фиксацией) подключены соответственно к шинам 1-4, зазонтальных шин 127-136 и 137-146 (фиг. 1 и 2) пространственно одинаковы.
Устройство работает следующим образом.
Элементами 23-27 выбираете } тип трассы и ее программа работы (для кольцевых
мыкающие контакты 28-31 датчиков поло- 5 трасс). Например, включением элемента 23
устанавливается работа с тупиковой трассой. Объект находится на месте, которое закодировано в единицах датчиком с контактами 149, 159 и 169, что соответствует «2, 10 в десятках - с контактами 31, 39 и 49, что соответствует «3. Задатчиком адреса устанавливается в младшем разряде отрицательный потенциал на шине 118, что соответствует «1, а в старшем разряде - на шине
жения подключены к подсистемам шин 32- 35 положения, замыкающие контакты 36-39 этих же датчиков - к подсистеме шин 40- 43, причем каждая образует общую точку с соответствующими исполнительными катушками реле 44 и 45 «Назад и «Вперед выбора направления движения, а выводы возвратных катушек этих же реле через контакты 46-49 датчиков положения подключены к соответствующим анодам (катодам) 15 7, что соответствует «1. Таким образом, объ- систем разделительных диодов 50-54, 55- ект находится на месте «32, а адресован
на место «И. С шины
7 отрицательный потенциал проходит через диод 71 и контакт 31 на первую обмотку реле 44, которое включается и защелкивается. По команде реле 44 объект перемещается в направлении от места «32 к месту «11. По ходу движения замыкаются контакты 30, 38 и 48. При замыкании контактов 29, 37 и 47
59, 60-64 и 65-67, у которых катоды (аноды) подключены соответственно к подсистемам шин 5-8, 9-12, 13-16, 17-19 и 20-22.
Программная матрица (фиг. 2) для тупи- 20 ковой трассы при задании мест адреса-вы зова образована комбинационной структурой
диодов 68-79, для кольцевой четной трассы при задании мест адреса - структурой диоf f f tW | M,M« UAIUJ жж J.J.uiV l,4.LjtH.LUt/t - U-irt I1LJ1 t 11
дов 80-91, а при задании мест вызова - дит55 и контакт
структурой диодов 92-103, для кольцевой,,,, лг „ ..
нечетной трассы при задании мест адреса - вРатные обмотки и 45 РДле 44 °™е- rr - - -гняет команду перемещения. Одновременно реле 44 и 45 замыкают соответственно контакты 269 и 270. В это время объект находится с координацией места «19, которому соответствуют в младшем разряде замкнутые контакты 156, 166 и 176. Теперь с шины 118 отрицательный потенотрицательный потенциал с шины 7 прохоструктурой диодов 104-109, а при задании мест вызова - структурой диодов 110- 115.
Дополнительный блок 116 выбора направления движения содержит задатчик адреса (не показан), датчики положения адреса младшего разряда, установленные на позициях адресования, с возможностью взаимо30
циал проходит через диод 222 и контакт 166 на первую обмотку реле 178, которое вклюдействия с объектом, с установкой адреса 35 чается и защелкивается. По команде реле в виде чисел младшего разряда, например178 объект перемещается от места «19 к
месту «11. По ходу движения поочередно замыкаются контакты 155, 165, 175 - 149, 159, 169. При замыкании контактов 148, 158 и 168 отрицательный потенциал с шины 40 118 через контакт 148 проходит на возвратные обмотки реле 177 и 178. Реле 177 отменяет команду перемещения.
Теперь, например, включением элемента
единиц, определяющих позиции адресования и положения в десятичной системе счисления, шины адресования, например шины 117-126 задания адреса-вызова, подсистемы шин 127-136 и 137-146, к которым через соответствующие замыкающие контакты 147-156, 157-166 и 167-176 датчиков положения адреса младшего разряда подключены соответственно совместно вторые и раздельно первые обмотки реле 177 и 178 выбора 4R 25 устанавливается работа устройства с направления движения, при этом программ- кольцевой четной трассой при вызове. Пусть ная матрица на диодах 179-268 соответ- объект находится на месте, которое закоди- ствует однозначно программной матрице ровано в единицах датчиком с контактами тупиковой трассы, а общая цепь питания148, 158 и 168, что соответствует «1, в деобмоток реле 177 и 178 выбора направле1 сятках - датчиком с контактами 29, 37 ния младшего разряда подключена к об- 50 и 47, что соответствует «1. Задатчиком ад- щей цепи питания через замыкающие контакты 269 и 270 обмоток реле 44 и 45 старшего разряда.
Программная матрица (фиг. 3) имеет обозначения вертикальных шин 117-126 при горизонтальной пространственной маркировке, 55 вызван на место «22. С шины 14 отрица.- что соответствует вертикальным шинам бло- тельный потенциал проходит через диод 101 ка 116 (фиг. 1) при вертикальной пространственной маркировке, а обозначения гориреса устанавливается в младшем разряде отрицательный потенциал на шине 119, что соответствует «2, а в старшем разряде - на шине 14, что соответствует «2. Таким образом, объект находится на месте «11, а
на шину 41 и через контакт 37 на первую обмотку реле 45, которое включается и защелзонтальных шин 127-136 и 137-146 (фиг. 1 и 2) пространственно одинаковы.
Устройство работает следующим образом.
Элементами 23-27 выбираете } тип трассы и ее программа работы (для кольцевых
трасс). Например, включением элемента 23
7, что соответствует «1. Таким образом, объ- ект находится на месте «32, а адресован
на место «И. С шины
7 отрицательный потенциал проходит через диод 71 и контакт 31 на первую обмотку реле 44, которое включается и защелкивается. По команде реле 44 объект перемещается в направлении от места «32 к месту «11. По ходу движения замыкаются контакты 30, 38 и 48. При замыкании контактов 29, 37 и 47
,M« UAIUJ жж J.J.uiV l,4.LjtH.LUt/t - U-irt I1LJ1 t 11
дит55 и контакт
отрицательный потенциал с шины 7 прохо30
месту «11. По ходу движения поочередно замыкаются контакты 155, 165, 175 - 149, 159, 169. При замыкании контактов 148, 158 и 168 отрицательный потенциал с шины 118 через контакт 148 проходит на возвратные обмотки реле 177 и 178. Реле 177 отменяет команду перемещения.
Теперь, например, включением элемента
5 устанавливается работа устройства с кольцевой четной трассой при вызове. Пусть объект находится на месте, которое закоди- ровано в единицах датчиком с контактами 148, 158 и 168, что соответствует «1, в десятках - датчиком с контактами 29, 37 и 47, что соответствует «1. Задатчиком ад-
вызван на место «22. С шины 14 отрица.- тельный потенциал проходит через диод 101
реса устанавливается в младшем разряде отрицательный потенциал на шине 119, что соответствует «2, а в старшем разряде - на шине 14, что соответствует «2. Таким образом, объект находится на месте «11, а
вызван на место «22. С шины 14 отрица.- тельный потенциал проходит через диод 101
на шину 41 и через контакт 37 на первую обмотку реле 45, которое включается и защелкивается. По комэнде первой обмотки реле 45 объект перемещается в направлении от места «11 к месту «22. По ходу движения объекта замыкаются контакты 30, 38 и 48 и отрицательный потенциал с шины 14 через 5 диод 62 и контакт 48 проходит на возвратные обмотки реле 44 и 45. Возвратная обмотка реле 45 отменяет команду перемещения. Одновременно реле 44 и 45 замыкают контакты 269 и 270. В это время объект находится с координацией места «20, которому соответствуют в младшем разряде замкнутые контакты 147, 157 и 167. Теперь с шины 119 отрицательный потенциал проходит через диод 231, шину 137 и контакт 167 на первую обмотку реле 178, которое вклю- 15 чается и защелкивается. По команде первой обмотки реле 178 объект перемещается от места «20 к месту «22. По ходу движения замыкаются контакты 149, 159 и 169, и отрицательный потенциал с шины 119 проходит
10
ложения, а для предлагаемого устройства требуется 162 диода и 110 датчиков положения.
Формула изобретения
Устройство для автоматического выбора направления движения объекта по авт. св. № 1289764, отличающееся тем, что, с.целью упрощения при увеличении позиций адресования, введены два реле выбора направления движения, задатчик адреса и соответствующие датчики положения адреса младшего разряда, установленные на позициях адресования с возможностью взаимодействия с объектом, выходы задатчика адреса младшего разряда подключены к шинам адресования, которые разделены на три группы и через замыкающие контакты датчиков положения адреса младшего разряда соответственно объединены между собой,общие выходы перрицательныи потенциал с шины ,1У проходи,во„ шин ования соот.
на возвратные обмотки реле 177 и 178 Воз 20Јсоед нены с цепями питания первратная обмотка реле 178 отменяет команду обмот(ж дополнительных реле выбора
перемещения.направления, вторая обмотка каждого из
которых подключена к общему выходу третьей группы шин адресования, общая цепь 25 питания дополнительных реле выбора направления через дополнительные замыкающие
Работа системы управления для остальных кольцевых трасс аналогична работе вышеописанному.
На 100 адресов известного устройства затрачивается 9801 диодов и 100 датчиков поконтакты основных реле выбора направления подключена к их общей цепи питания.
ложения, а для предлагаемого устройства требуется 162 диода и 110 датчиков положения.
Формула изобретения
Устройство для автоматического выбора направления движения объекта по авт. св. № 1289764, отличающееся тем, что, с.целью упрощения при увеличении позиций адресования, введены два реле выбора направления движения, задатчик адреса и соответствующие датчики положения адреса младшего разряда, установленные на позициях адресования с возможностью взаимодействия с объектом, выходы задатчика адреса младшего разряда подключены к шинам адресования, которые разделены на три группы и через замыкающие контакты датчиков положения адреса младшего разряда соответственно объединены между собой,общие выходы перво„ шин ования соот.
которых подключена к общему выходу третьей группы шин адресования, общая цепь питания дополнительных реле выбора направления через дополнительные замыкающие
контакты основных реле выбора направления подключена к их общей цепи питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1539148A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1289764A1 |
| Устройство для автоматического выбора направления движения объекта | 1989 |
|
SU1669827A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1778052A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1490062A1 |
| Устройство для адресования транспортного средства с электроприводом | 1987 |
|
SU1431988A2 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1461722A1 |
| Устройство для адресования транспортного средства с электроприводом | 1983 |
|
SU1184767A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1509316A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1518249A1 |
Изобретение относится к автоматике промышленного транспорта и может быть использовано для управления оборудованием с замкнутыми трассами движения. Цель изобретения - упрощение устройства при увеличении позиций адресования. Для этого устройство дополнительно снабжается блоком выбора направления движения, который содержит задатчик адреса, шины задания адреса-вызова, подсистемы шин, которые через замыкающие контакты установленных на позициях адресования с возможностью взаимодействия с объектом датчиков положения адреса младшего разряда соответственно объединены в три группы и подключены к двум дополнительным реле выбора направления движения. Программная матрица на диодах однозначно соответствует программной матрице тупиковой трассы. Общая цепь питания обмоток реле младшего разряда подключена к общей цепи питания через замыкающие контакты обмоток реле выбора направления движения блока фактического положения объекта. Тип трассы и программа ее работы выбираются коммутационными элементами, которые подключены к шинам задания старшего разряда адреса. При выборе направления движения объекта для различных программ перемещения при задании мест адреса-вызова использована единая система управления. 3 ил.
Младший разряд©
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1289764A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
