Изобретение относится к промышленному транспорту и может быть использовано для управления конвейерами, крана- ми-штабелерами, автооператорами, тележками для межоперационных, передач, оборудования с замкнутыми трассами движения.
Цель изобретения - повышение эффективности работы за счет избирательности программ.
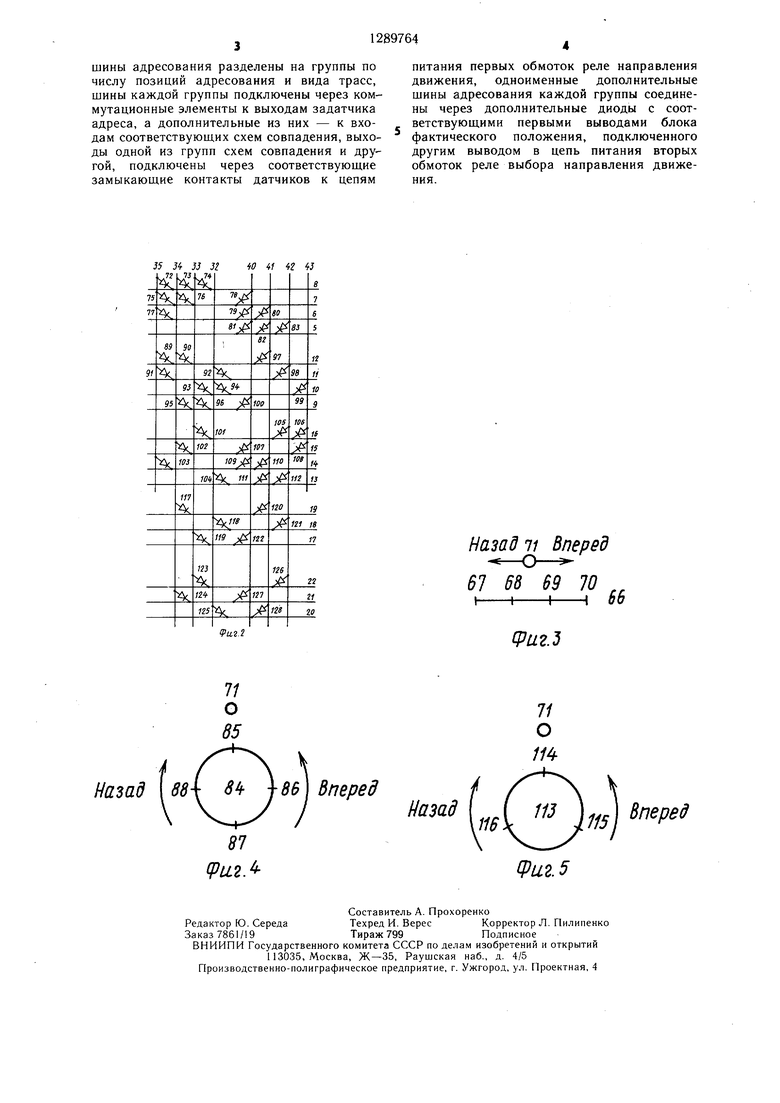
На фиг. 1 приведена принципиальная электрическая схема устройства для автоматического выбора направления движения объекта; на фиг. 2 - диодные комбинационные структуры программной матрицы для различных программ при задании мест адреса-вызова; на фиг. 3-5 - типы трасс, реализуемые диодными комбинационными структурами.
Устройство состоит из задатчика адреса (не показан), блока фактического положения объекта, выполненного в виде датчиков, установленных на позициях адресования с возможностью взаимодействия с объектом, шин адресования, например шин 1-4 задания адреса - вызова, шин 5-8 тупиковой трассы, шин 9-12 кольцевой четной трассы при задании адреса и шин 13-16 при задании вызова, шин 17-19 кольцевой нечетной трассы при задании адреса и пин 20-22 при задании вызова. Подсистемы шин 5-8, 9-12, 13-16, 17--19, 20-22 через коммутационные элементы 23-27 (например, кнопки с фиксацией) подключены соответственно к шинам 1-4. Замыкаюшие контакты 28-31 датчиков положения подключены к подсистеме шин 32-35 положения, замыкаюш,ие контакты 36-39 этих же датчиков - к подсистеме шин 40-43 и каждая образует обшую точку с соответст- вуюш.ими исполнительными катушками реле «Назад, «Вперед выбора направлений движения, а выводы возвратных катушек этих же реле через контакты 44-47 датчиков положения подключены к соответствующим анодам (катодам) систем разделительных диодов 48-52, 53-57, 58-62, 63-65, у которых катоды (аноды) подключены соответственно к подсистемам шин 5-8, 9-12, 13-16, 17-19 и 20-22. Программная матрица для тупиковой трассы 66 при задании мест адреса-вызова 67-70 для подвижного объекта 71 (фиг. 3) образована комбинационной структурой диодов 72-83 (фиг. 2), дл-я кольцевой четной трассы 84 (фиг. 4) при задании мест адреса 85-88 (фиг. 4) - структурой диодов 89-100 (фиг. 2), а при задании мест вызова - структурой диодов 101 -112 (фиг. 2), для кольцевой нечетной трассы 113 (фиг. 5) при задании мест адреса 114-116 (фиг. 5) - структурой диодов 117-122 (фиг. 2), а при задании мест вызова - структурой диодов 123-128 (фиг. 2).
Устройство работает следуюшим образом. Элементами 23-27 выбирается тип трассы и программа ее работы (для кольцевых трасс). Например, включением элемента 23
устанавливается работа устройства с тупиковой трассой 66 с местами задания адреса- вызова 67-70 для подвижного объекта 71 (фиг. 3). При нахождении объекта 71 на месте 67 замкнуты контакты 28, 36 и 44 датчика положения. Задается адрес места 70.
На шину 4 с места 67 задания адреса подается отрицательный (положительный) потенциал, который через шину 5, диод 81, шину 40 и контакт 36, поступает на вывод исполнительной катушки реле - следует команда «Вперед. Объект 71 перемещается и, дойдя до места адреса 70, замыкает контакты 31, 39 и 47 датчика положения. Теперь отрицательный (положительный) потенциал с шины 5 через диод 63 и контакт 47 поступает на выводы возвратных катушек реле направления - следует отмена команды «Вперед и объект 71 прекращает перемещение, теперь объект 71 с места 70 нужно вызвать, например, на место 68. С места вызова 68 через шину 2, элемент 23, шину 7, диод 75, шину 35 и контакт 31 на вывод исполнительной катушки реле подается отрицательный (положительный) потенциал - следует команда «Назад. Объект 71 перемещается и, дойдя до места вызова 68, замыкает контакты 29, 37 и 45 датчика положения. Отрицательный (положительный) потенциал с шины 7 через диод 53 и контакт 45 поступает на выводы возвратных катушек реле направлений - следует отмена команды «Назад и объект 71 прекраш,ает перемещение.
Работа системы управления для трассы 84 с местами задания адреса-вызова 85-88, трассы 113 с местами задания адреса-вызова 114-116 аналогична работе системы управления для трассы 66.
Формула, изобретения
Устройство для автоматического выбора направления движения объекта, содержащее задатчик адреса, шины адресования, подключенные к входам схем совпадения и через диоды к одним из выводов блока фактического положения объекта, и реле выбора направления движения, отличающееся тем, что, с целью повышения эффективности
работы за счет избирательности программ, оно снабжено коммутационными элементами, дополнительными шинами адресования, схемами совпадения и диодами, реле выбора направления движения выполнено двухобмоточными, а блок фактического положения объекта - в виде датчиков с замыкающими контактами, установленных на позициях адресования с возможностью взаимодействия с объектом, причем вне
шины адресования разделены на группы по числу позиций адресования и вида трасс, шины каждой группы подключены через коммутационные элементы к выходам задатчика адреса, а дополнительные из них - к входам соответствующих схем совпадения, выходы одной из групп схем совпадения и другой, подключены через соответствующие замыкающие контакты датчиков к цепям
Риг.2
питания первых обмоток реле направления движения, одноименные дополнительные шины адресования каждой группы соединены через дополнительные диоды с соответствующими первыми выводами блока фактического положения, подключенного другим выводом в цепь питания вторых обмоток реле выбора направления движения.
Назад 11 Вперед
67 68 69 70 111
fPU2.3
66
71 О
85
88
4 86 Вперед
-и / 87
иг.
Назад
Вперед
(риг. 5
Составитель А. Прохоренко
Редактор Ю. СередаТехред И. ВересКорректор Л. Пилипенко
Заказ 7861/19Тираж 799Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4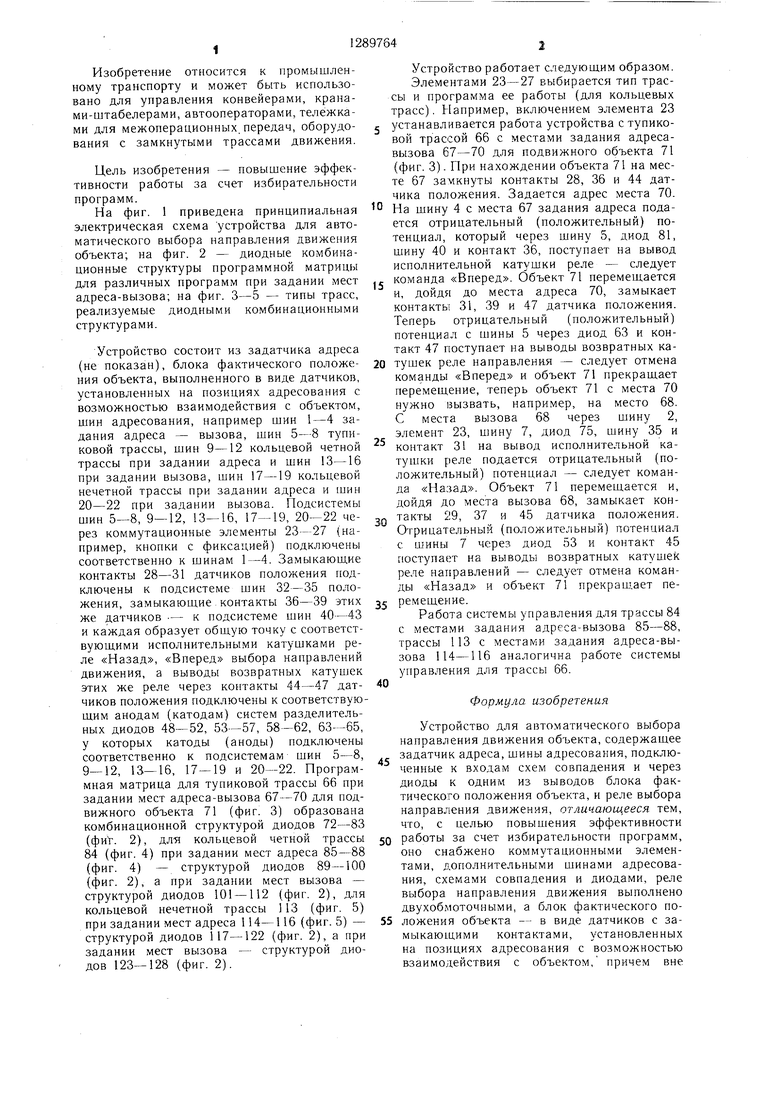
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1555246A2 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1539148A1 |
| Устройство для автоматического выбора направления движения объекта | 1989 |
|
SU1669827A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1461722A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1509316A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1490062A1 |
| Устройство для автоматического выбора направления движения объекта | 1983 |
|
SU1146260A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1456348A1 |
| Устройство для адресования транспортного средства с электроприводом | 1983 |
|
SU1184767A1 |
Изобретение относится к проМышленно- му транспорту и позволяет за счет избирательности программ осуществлять выбор направления движения объекта. Для этого тип трасс ы и программа ее работы (для кольцевых трасс) выбирается коммутационными элементами 23-27, которые подключены к шинам 1-4 задания адреса. При выборе направления движения объекта для различных программ перемещения при задании мест адреса-вызова использована единая система управления. Программная матрица состоит из подсистем шин 5-8, 9-12, 13-16, 17-19 и 20-22, соответствующих числу реализуемых программ, и двух одинаковых подсистем щин 32-35 и 40-43. Каждая из них подключена через замыкающие контакты 28-31 и 36-39 соответствующих датчиков к исполнительным катущкам выбора направлений. Выходы из возвратных катущек образуют общую точку с замыкающими контактами 44-47 датчиков и подключены через них и разделительные системы диодов 48-52, 53-57, 58-62 и 63-65 к подсистемам шин 5-8, 9-12, 13-16, 17-19 и 20-22. Конструкция матрицы обеспечивает любые диодные комбинационные структуры. 5 ил. & (Л N3 СХ) со О5 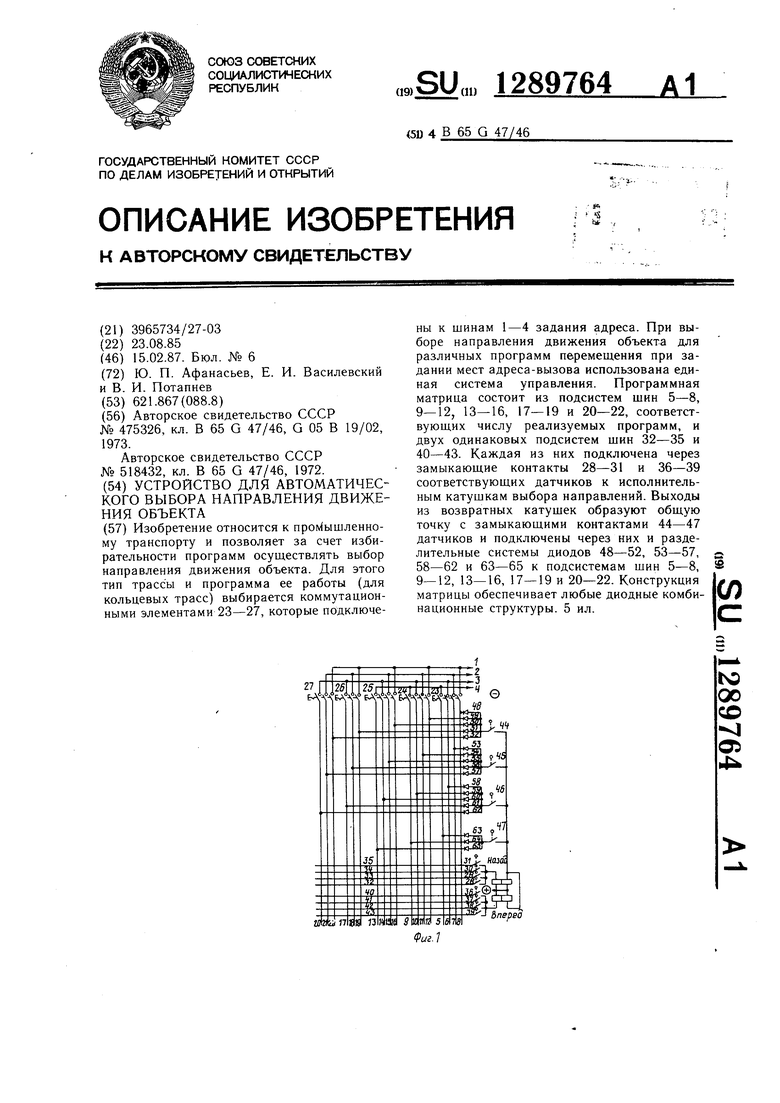
| Устройство для программного реверса движения люлечного конвейера | 1973 |
|
SU475326A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматического управления перемещением подвижного объекта | 1972 |
|
SU518432A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
