1
(21)4334837/25-08
(22)30.11.87
(46) 07.07.89. Кюл. N 25
(72) А.Н.Артоболевский, Ю.И.Климухин, К.Р.Глебов и Б.В.Кишнин
(53)621.941.3 (088.8)
(56)Авторское свидетельство СССР № 994147, кл. В 23 В 31/16, 1981.
(54)УСТРОЙСТВО УПРАВЛКИШ CA ;OДEHTрирунл шк ПАТРОно :
(57)Изобретение относится к станкостроению и может быть использовано при закреплении дегалей на станках токарного типа с автоматизированным циклом рбработки. Целью изобретения является повышение производительности и расширение технологических
возможностей за счет возможности учета размера заготовок при раскрытии кулачков патрона и исключения возможности незажатия заготовки, диаметр которой не заложен в программе ЧПУ. В устройство введен механизм фиксирования поверхности заготовки, на торце крторого во взаимно перпендикулярных плоскостях размещены датчики касания. Управляющий вход механизма подключен к выходу схемы управления главным приводом вращения. В устройстве предусмотрена возможность автоматической переналадки станка на обработку заготовок при поступлении их в любом случайном порядке, 2 ил.
ё 
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированное устройство выдачи заготовок | 1987 |
|
SU1459787A1 |
| Устройство для управления робототизированным комплексом | 1985 |
|
SU1278203A1 |
| Устройство для управления многопозиционным объектом | 1989 |
|
SU1734074A1 |
| Загрузочное устройство | 1988 |
|
SU1678572A2 |
| Устройство для размерного контроля детали на станке с ЧПУ | 1986 |
|
SU1393592A1 |
| Устройство для монтажа проволочных перемычек | 1986 |
|
SU1430214A1 |
| Швейный роботизированный комплекс | 1986 |
|
SU1404329A1 |
| Патрон | 1987 |
|
SU1430186A1 |
| Устройство для управления автоматической сменой заготовок на токарных станках с числовым программным управлением | 1985 |
|
SU1275374A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗУБОДОЛБЕЖНЫМ СТАНКОМ | 1991 |
|
RU2025255C1 |
Изобретение относится к станкостроению и может быть использовано при закреплении деталей на станках токарного типа с автоматизированным циклом обработки. Целью изобретения является повышение производительности и расширение технологических возможностей за счет возможности учета размера заготовок при раскрытии кулачков патрона и исключения возможности незажатия заготовки, диаметр которой не заложен в программе ЧПУ. В устройство введен механизм фиксирования поверхности заготовки, на торце которого во взаимно перпендикулярных плоскостях размещены датчики касания. Управляющий вход механизма подключен к выходу схемы управления главным приводом вращения. В устройстве предусмотрена возможность автоматической переналадки станка на обработку заготовок при поступлении их в любом случайном порядке. 2 ил.
Изобретение относится к станкостроению и может быть использовано при закреплении деталей на станках токарного типа с автоматизированным циклом обработки.
Целью изобретения является повышение производительности процесса переналадки патрона и расширение технологических возможностей за счет возможности учета размера заготовок при раскрытии кулачков патрона и исключения возможности незажатия заготовки, диаметр которой не заложен в прог рамме ЧПУ.
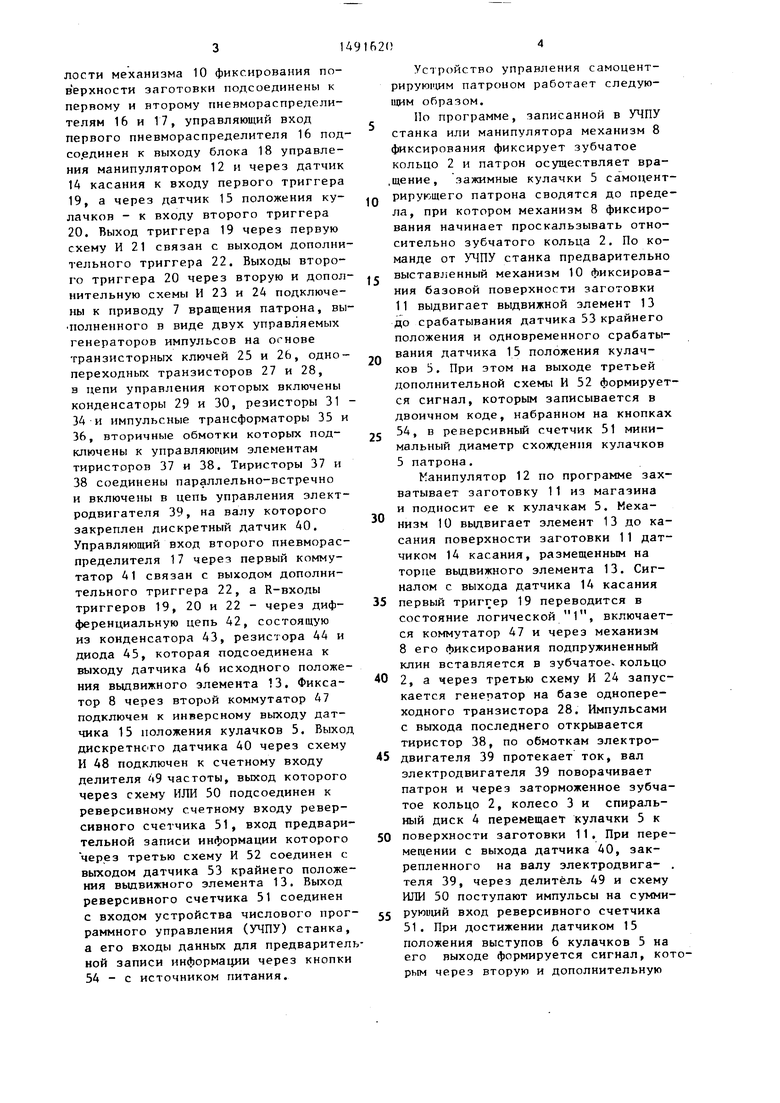
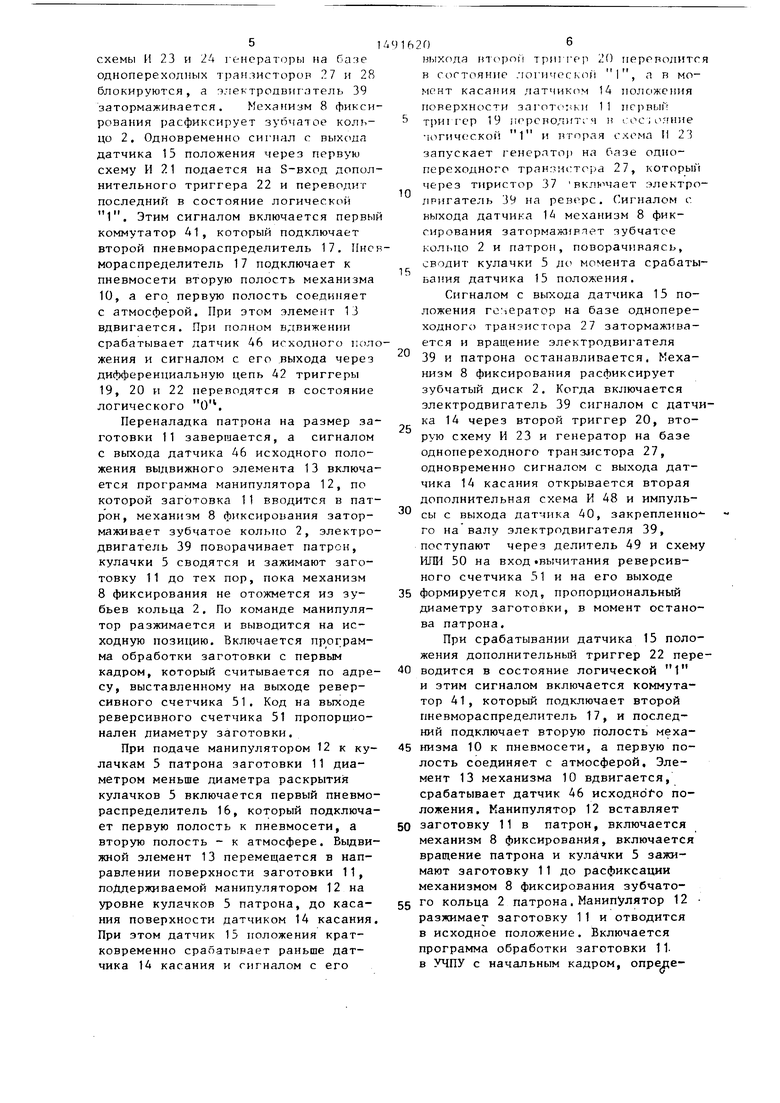
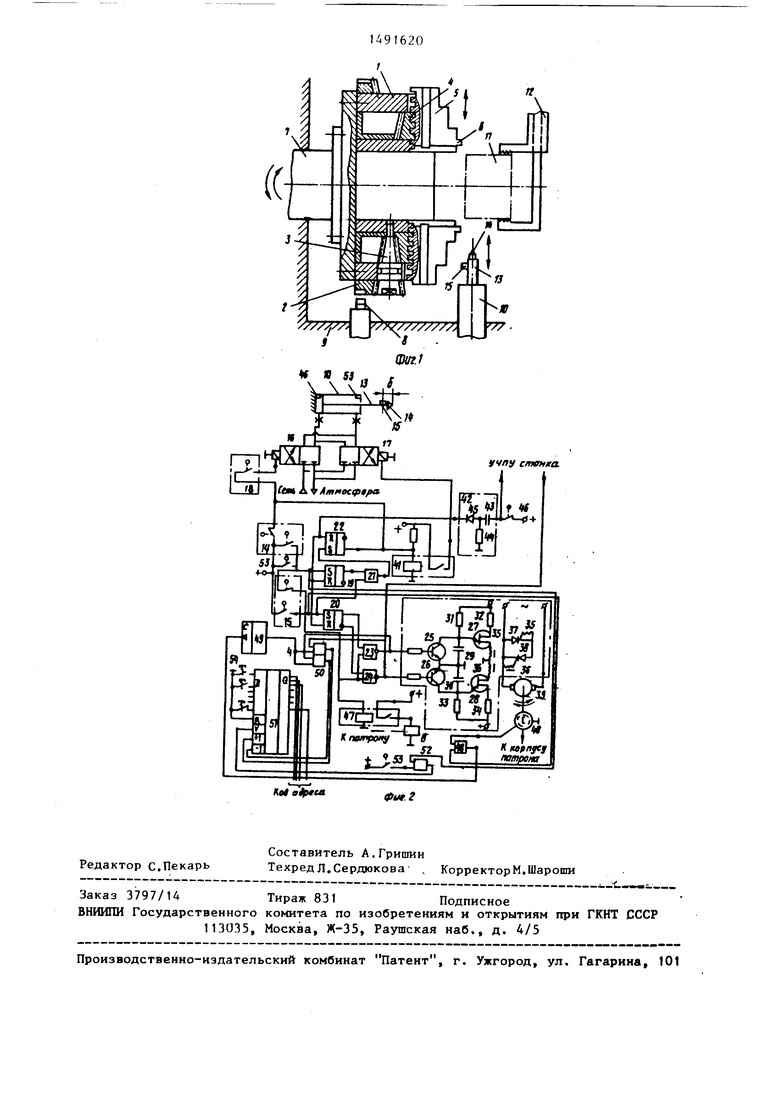
На фиг. 1 показан патрон, осевой разрез; на фиг. 2 - функциональная схема устройства.
Устройство упранления самоцент- рирующим патроном содержит самоцент- р 1рующий патрон, выполненный в виде
корпуса 1 с установленньп в нем поворотным зубчатым кольцом 2, которое через коническое зубчатое колесо 3 и спиральный диск 4 связано с зажимными кулачками 5, на,уровне базирующей поверхности которых выполнены выступы 6. Корпус 1 соединен с валом привода 7, а поворот- , ное зубчатое кольцо 2 взаимодействует с механизмом 8 фиксирования, закрепленным на станине 9. На станит не 9 установлен механизм 10 фиксирования базовой поверхности заготовки 11, которая на уровне центров станка поддерживается манипулятором 12. На конце ньдвижного элемента 13 механизма 10 фиксирования поверхности заготовки установлены датчик 14 касания поверхности заготовки 1Ги датчик 15 положения кулачков 5. По
СО
лости механизма 10 фиксирования поверхности заготовки подсоединены к первому и второму пневмораспредели- телям 16 и 17, управляющий вход первого пневмораспределителя 16 под со.единен к выходу блока 18 управления манипулятором 12 и через датчик 14 касания к входу первого триггера
19,а через датчик 15 положения кулачков - к входу второго триггера
5
0
5
0
5
0
5
0
5
Успройство управления самоцент- рируюрдим патроном работает следующим образом.
По программе, записанной в УЧПУ станка или манипулятора механизм 8 фиксирования фиксирует зубчатое кольцо 2 и патрон осуществляет вра- ,щение, зажимные кулачки 5 самоцентрирующего патрона сводятся до предела, при котором механизм 8 фиксирования начинает проскальзывать относительно зубчатого кольца 2. По команде от УЧПУ станка предварительно выставленный механизм 10 фиксирования базовой поверхности заготовки 11 выдвигает выдвижной элемент 13 до срабатывания датчика 53 крайнего положения и одновременного срабатывания датчика 15 положения кулачков 5. При этом на выходе третьей дополнительной схемы И 52 формируется сигнал, которым записывается в двоичном коде, набранном на кнопках 54, в реверсивный счетчик 51 минимальный диаметр схождения кулачков 5 патрона.
Манипулятор 12 по программе захватывает заготовку 11 из магазина и подносит ее к кулачкам 5. Механизм 10 выдвигает элемент 13 до касания поверхности заготовки 11 датчиком 14 касания, размещенным на торце выдвижного элемента 13. Сигналом с выхода датчика 14 касания первый триггер 19 переводится в состояние логической 1, включается коммутатор 47 и через механизм 8 его фиксирования подпружиненный клин вставляется в зубчатое, кольцо 2, а через третью схему И 24 запускается генератор на базе однопере- ходного транзистора 28. Импульсами с выхода последнего открывается тиристор 38, по обмоткам электродвигателя 39 протекает ток, вал электродвигателя 39 поворачивает патрон и через заторможенное зубчатое кольцо 2, колесо 3 и спиральный диск 4 перемещает кулачки 5 к поверхности заготовки 11, При перемещении с выхода датчика 40, закрепленного на валу электродвига- . теля 39, через делитель 49 и схему ИЛИ 50 поступают импульсы на суммирующий вход реверсивного счетчика 51. При достижении датчиком 15 положения выступов 6 кулачков 5 на его выходе формируется сигнал, которым через вторую и дополнительную
5
схемы И 23 и 2А генераторы на базе одноперехолных т 5анзнсторов 27 и 28 блокируются, а э.Ieктpoлвиraтeл J 39 затормаживается. Механизм 8 фиксирования расфиксирует зубчатое кольцо 2. Одновременно сигнал с выхсща датчика 15 положения через первую схему И 21 подается на S-вход дополнительного триггера 22 и переводит последний в состояние логической 1. Этим сигналом включается первы коммутатор 41, который подключает второй пневмораспределитель 17, Пнс мораспределитель 17 подключает к пневмосети вторую полость механизма 10, а его первую полость соединяет с атмосферой. При этом элемент 13 вдвигается. При полном вдвижении срабатывает датчик 46 исходного полжения и сигналом с его выхода через дифференциальную цепь 42 триггеры 19, 20 и 22 переводятся в состояние логического О ,
Переналадка патрона на размер за готовки 11 завершается, а сигналом с выхода датчика 46 исходного положения выдвижного элемента 13 включается программа манипулятора 12, по которой заготовка 11 вводится в патрон, механизм 8 фиксирования затормаживает зубчатое кольцо 2, электродвигатель 39 поворачивает патрон, кулачки 5 сводятся и зажимают заготовку 11 до тех пор, пока механизм 8 фиксирования не отожмется из зубьев кольца 2. По команде манипулятор разжимается и выводится на исходную позицию. Включается программа обработки заготовки с первым кадром, который считывается по адресу, выставленному на выходе реверсивного счетчика 51, Код на выходе реверсивного счетчика 51 пропорционален диаметру заготовки,
При подаче манипулятором 12 к кулачкам 5 патрона заготовки 11 диаметром меньше диаметра раскрытия кулачков 5 включается первый пневмораспределитель 16, который подключает первую полость к пневмосети, а вторую полость - к атмосфере, Вьщви- жной элемент 13 перемещается в направлении поверхности заготовки 11, поддерживаемой манипулятором 12 на уровне кулачков 5 патрона, до касания поверхности датчиком 14 касания При этом датчик 15 положения кратковременно срабатывает раньше датчика 14 касания и сигналом с его
10
16
25
16206
выхода Fncpoii триггер 20 переролится в состояние . югнческой I, а в момент касания латчиком 14 положения поверхности загот( 1 1 первый 5 триггер 19 переводится и i;ocio (Hne югнческой 1 и иторая схема И 23 запускает генератор на базе одно- переходного транзи1:тора 27, который через тиристор 37 вкль чает электро- лригатель 39 на реверс. Сигналом с выхода датчика 14 механизм 8 фиксирования затормажирпет зубчатое кольцо 2 и патрон, поворачиваясь, сводит кулачки 5 дс момента срабатывания датчика 15 положения.
Сигналом с выхода датчика 15 положения генератор на базе однопере- ходногс) транзистора 27 затормаживается и вращение электродвигателя 39 и патрона останавливается, Механизм 8 фиксирования расфиксирует зубчатый диск 2. Когда включается электродвигатель 39 сигналом с датчика 14 через второй триггер 20, вторую схему И 23 и генератор на базе однопереходного транзлстора 27, одновременно сигналом с выхода датчика 14 касания открывается вторая дополнительная схема И 48 и импуль сы с выхода датчика 40, закрепленно- го на валу электродвигателя 39, поступают через делитель 49 и схему ИЛИ 50 на вход «вычитания реверсивного счетчика 51 и на его выходе
35 формируется код, пропорциональный диаметру заготовки, в момент останова патрона.
При срабатывании датчика 15 положения дополнительный триггер 22 пере0 водится в состояние логической 1 и этим сигналом включается коммутатор 41, который подключает второй пневмораспределитель 17, и последний подключает вторую полость меха5 низма 10 к пневмосети, а первую полость соединяет с атмосферой. Элемент 13 механизма 10 вдвигается, срабатывает датчик 46 исходного положения. Манипулятор 12 вставляет
0 заготовку 11 в патрон, включается механизм 8 фиксирования, включается вращение патрона и кулачки 5 зажимают заготовку 11 до расфиксации механизмом 8 фиксирования зубчато5 го кольца 2 патрона. Манипулятор 12 разжимает заготовку 11 и отводится в исходное положение. Включается программа обработки заготовки 11. в УЧПУ с начальным кадром, опрепеляемым кодом на выходе реверсивно- гЬ счетчика 51.
Формула изобретени Устройство управления самоцентрирующим патроном, содержащее фиксатор, закрепленный на станине станка
с возможностью взаимодействия через зубчато-спиральную передачу, размещенную в корпусе патрона, с зажимными кулачками, и блок управления, подключенный к управляющим входам привода вращения патрона и фиксатора, отличающееся тем, что, с целью повышения производительности, в устройство дополнительно рведен механизм фиксирования базирующ поверхности заготовки, закрепленный на станине на уровне кулачков патрона и выполненный в виде пневмопривода с пневмораспределителем, на конце выдвижного элемента которого закреплены дополнительно введенные датчик касания заготовки и датчик положения кулачков, управляющий вход первого пневмораспределителя подсоединен к выходу блока управления манипулятором, кроме того, устройство снабжено первым, вторым и третьим триггерами, датчиком исходного положения, датчиком крайнего положения, дискретным датчиком, закрепленным на валу электродвигателя, пятью схемами И, первой и второй схемами ИЛИ, первым и вторым коммутаторами, дифференциальной цепью, делителем частоты, реверсивным счетчиком, причем выход блока управления через нормально замкнутый контакт датчика касания подключен к плюсовой шине, S-вход первого триггера об )единен с первым входом первой суемы И и через нормально разомкнутый контакт датчика касания заготовки подключен к ключу питания а через нормально замкнутый контакт датчика положения кулачков подключен к входу первого коммутатора и объединенным первым входам второй и третьей схем И, выход второй схе- мы И подключен к объединенным первы входам привода и первой схемы ИЛИ,
0
5
0
5
0
5
0
5
0
выход третьей схемы И подключен к объединенным второму входу привода и первому входу второй схемы ИЛИ, вторые входы первой и второй схем ИЛИ объединены и подключены к выходу делителя частоты. выход первой схемы ИЛИ подключен к вычитающему входу реверсивного счетчика, выход второй схемы ИЛИ подключен к суммирующему входу реверсивного счетчика, выход первой схемы И подключен к входу делителя частоты, второй вход первой схемы И подключен к дискретному датчику, S-вход второго триггера подключен к объединенным первым входам четвертой и пятой схем И и через нормально разомкнутый контакт датчика положения кулачков к плюсу питания, прямой выход второго триггера подключен к второму входу второй .схемы И, а реверсивный выход второго триггера г||Ьдключен к второму входу .третьей схемы И, выход четвертой схемы И подключен к S-входу третьего триггера, выход которого подключен к управляющему входу второго коммутатора и выходу блока управления, через нормально разомкнутый контакт которого второй пневмораспределитель подключен к плюсу питания, через нормально разомкнутый контакт первого коммутатора механизм фиксирования подключен к плюсу питания, первый нормально разомкнутый контакт датчика крайнего положения подключен параллельно нормально разомкнутому контакту датчика касания деталей, через второй нормально разомкнутый контакт датчи|«а крайнего положения второй вход пятой схемы И соединен с плюсом питания, выход пятой схемы И соединен с V-входом реверсивного счетчика, выход которого является кодом адреса, кнопки подключены к D-входу реверсивного счетчика, R- входы триггеров объединены и через дифференциальную цепь подключена к ЧПУ станка, выход дифференциальной цепи через нормально замкнутый контакт датчика исходного положения подключен к плюсу питания.
я Si
а S.
Па S.
учпу стрижа.
