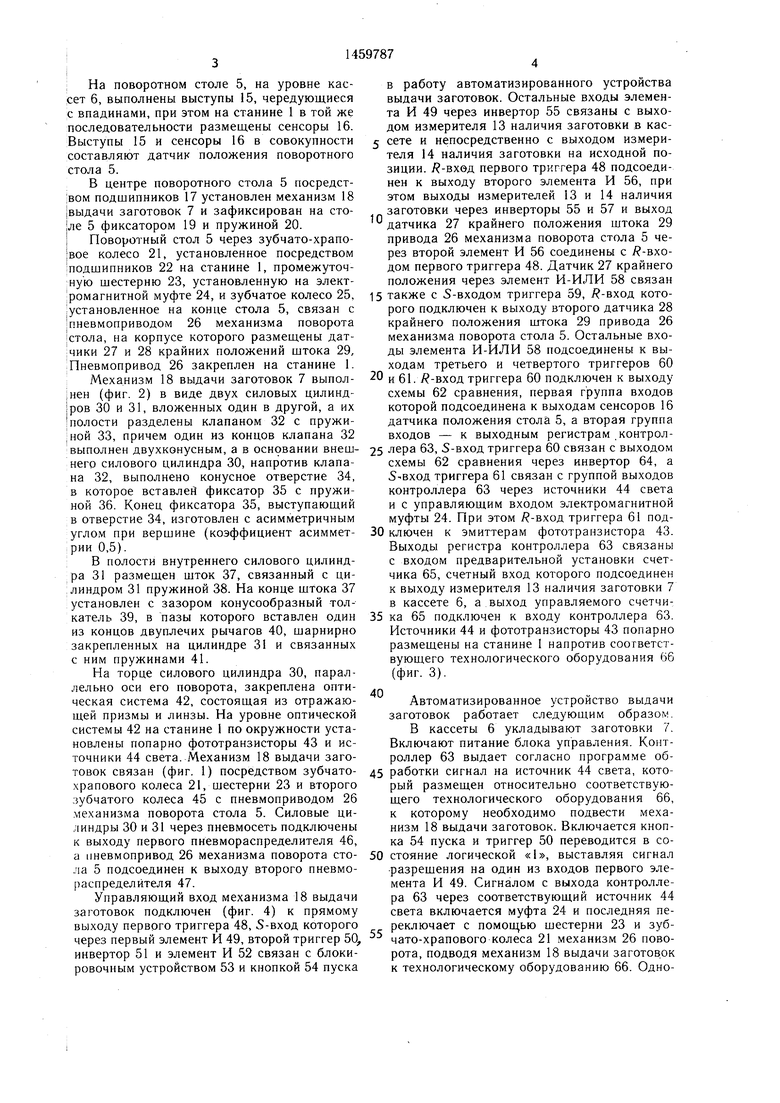
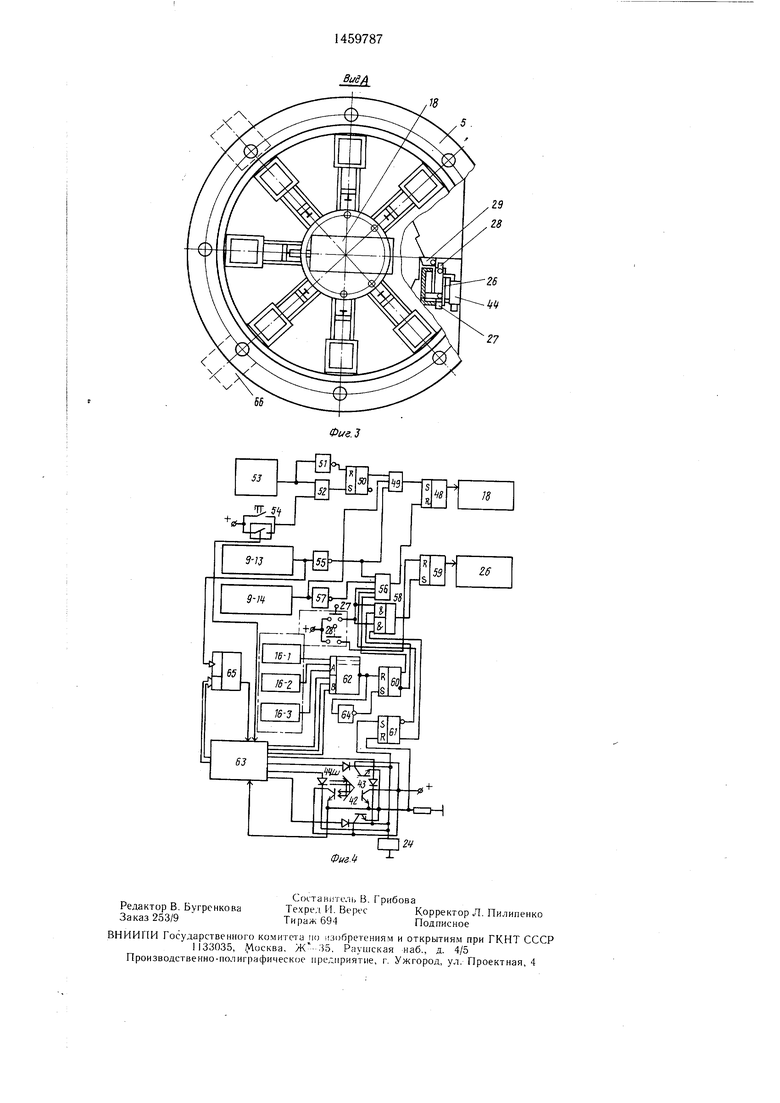
; На поворотном столе 5, на уровне кассет 6, выполнены выступы 15, чередующиеся с впадинами, при этом на станине 1 в той же последовательности размещены сенсоры 16. Выступы 15 и сенсоры 16 в совокупности составляют датчик положения поворотного стола 5.
В центре поворотного стола 5 посредст- ;вом подшипников 17 установлен механизм 18 выдачи заготовок 7 и зафиксирован на сто- ле 5 фиксатором 19 и пружиной 20. I Поворотный стол 5 через зубчато-храпо- }вое колесо 21, установленное посредством подшипников 22 на станине 1, промежуточную шестерню 23, установленную на электромагнитной муфте 24, и зубчатое колесо 25, установленное на конце стола 5, связан с пневмоприводом 26 механизма поворота тола, на корпусе которого размещены датчики 27 и 28 крайних положений штока 29, Пневмопривод 26 закреплен на станине 1. Механизм 18 выдачи заготовок 7 выпол- |нен (фиг. 2) в виде двух силовых цилинд- ipoB 30 и 31, вложенных один в другой, а их I полости разделены клапаном 32 с пружи- :ной 33, причем один из концов клапана 32 выполнен двухконусным, а в основании внешнего силового цилиндра 30, напротив клапана 32, выполнено конусное отверстие 34, в которое вставлей фиксатор 35 с пружиной 36. Конец фиксатора 35, выступающий в отверстие 34, изготовлен с асимметричным углом при вершине (коэффициент асимметрии 0,5).
В полости внутреннего силового цилиндра 31 размещен щток 37, связанный с цилиндром 31 пружиной 38. На конце щтока 37 установлен с зазором конусообразный толкатель 39, в пазы которого вставлен один из концов двуп.лечих рычагов 40, щарнирно закрепленных на цилиндре 31 и связанных с ним пружинами 41.
На торце силового цилиндра 30, параллельно оси его поворота, закреплена оптическая система 42, состоящая из отражающей призмы и линзы. На уровне оптической системы 42 на станине 1 по окружности установлены попарно фототранзисторы 43 и источники 44 света. Механизм 18 выдачи заготовок связан (фиг. 1) посредством зубчато- храпового колеса 21, щестерни 23 и второго зубчатого колеса 45 с пневмоприводом 26 механизма поворота стола 5. Силовые цилиндры 30 и 31 через пневмосеть подключены к выходу первого пневмораспределителя 46, а пневмопривод 26 механизма поворота стола 5 подсоединен к выходу второго пневмораспределителя 47.
Управляющий вход механизма 18 выдачи заготовок подключен (фиг. 4) к прямому выходу первого триггера 48, S-вход которого через первый элемент И 49, второй триггер 5Q инвертор 51 и элемент И 52 связан с блокировочным устройством 53 и кнопкой 54 пуска
в работу автоматизированного устройства выдачи заготовок. Остальные входы элемента И 49 через инвертор 55 связаны с выходом измерителя 13 наличия заготовки в кассете и непосредственно с выходом измерителя 14 наличия заготовки на исходной позиции. У -вход первого триггера 48 подсоединен к выходу второго элемента И 56, при этом выходы измерителей 13 и 14 наличия заготовки через инверторы 55 и 57 и выход
датчика 27 крайнего положения щтока 29 привода 26 механизма поворота стола 5 через второй элемент И 56 соединены с -вхо- дом первого триггера 48. Датчик 27 крайнего положения через элемент И-ИЛИ 58 связан
5 также с S-входом триггера 59, / -вход которого подключен к выходу второго датчика 28 крайнего положения штока 29 привода 26 механизма поворота стола 5. Остальные входы элемента И-ИЛИ 58 подсоединены к выходам третьего и четвертого триггеров 60
0 и 61. / -вход триггера 60 подключен к выходу схемы 62 сравнения, первая группа входов которой подсоединена к выходам сенсоров 16 датчика положения стола 5, а вторая группа входов - к выходным регистрам ,контрол5 лера 63, S-вход триггера 60 связан с выходом схемы 62 сравнения через инвертор 64, а 5-вход триггера 61 связан с группой выходов контроллера 63 через источники 44 света и с управляющим входом электромагнитной муфты 24. При этом R-вкоц триггера 61 под0 ключен к эмиттерам фототранзистора 43. Выходы регистра контроллера 63 связаны с входом предварительной установки счетчика 65, счетный вход которого подсоединен к выходу измерителя 13 наличия заготовки 7 в кассете 6, а выход управляемого счетчи5 ка 65 подключен к входу контроллера 63. Источники 44 и фототранзисторы 43 попарно размещены на станине 1 напротив соответствующего технологического оборудования 66 (фиг. 3).
0 ,
Автоматизированное устройство выдачи
заготовок работает следующим образом. В кассеты 6 укладывают заготовки 7. Включают питание блока управления. Контроллер 63 выдает согласно программе об5 работки сигнал на источник 44 света, который размещен относительно соответствующего технологического оборудования 66, к которому необходимо подвести механизм 18 выдачи заготовок. Включается кнопка 54 пуска и триггер 50 переводится в со0 стояние логической «1, выставляя сигнал разрещения на один из входов первого элемента И 49. Сигналом с выхода контроллера 63 через соответствующий источник 44 света включается муфта 24 и последняя переключает с помощью шестерни 23 и зуб- чато-храпового колеса 21 механизм 26 поворота, подводя механизм 18 выдачи заготовок к технологическому оборудованию 66. Одновременно с включением муфты 24 триггер 66 по S-входу переводится в состояние логической «1, и сигналом через элемент И-ИЛИ 58 и триггер 59 механизм 26 поворота посредством поочередного переключения триггера 59 датчиками 27 и 28 крайнего положения штока 29 механизма 26 доводит механизм 18 выдачи заготовок к соответствующему оборудованию 66, при котором световой поток от источника 44 света через призмораспределитель 47 переводит механизм 18 выдачи заготовок в исходное положение в следующем порядке. Воздух подается в левую полость внешнего цилиндра 30, внутренний цилиндр 31 перемещается в исходное положение (правое крайнее на фиг. 2). По достижении цилиндром 30 исходного положе ния клапан 32 вводится в конусное отверстие 34, фиксатор 35 поднимается и клапан 32, упираясь в стенку внешнего цилиндра 30,
ВОИ поток от источника ЧЧ CBCia .л 1фис -уиирал, U v.,..,.j
MV 42 поступает на парный с ним фототран- открывает полость внутреннего цилиндра 31.
,П,,,rт,тлIJr л т r r ПГ4Л I .lf IJUd ЧХ ОТИОПЫТ
зистор 43. Сигналом с выхода фототранзистора 43 триггер 61 переводится в состояние логического «О. Механизм 26 поворота останавливается после срабатывания датчика 28 крайнего положения, а контроллер 63 сжимает сигнал с источника 44 света и муфты 24. Последняя переключает шестерню 23 и механизм 26 поворота к механизму 18 выдачи заготовок через шестерню 23. Контроллер 63 согласно программе обработки выставляет код требуемой заготовки на один из входов схемы 62 сравнения. На выходе схемы 62 сравнения формируется сигнал, которым триггер 60 переводится в состояние логического «О. Этим сигналом подключается триггер 59 через элемент И-ИЛИ 58. Триггер 59 периодически подключает механизм 26 поворота и последний поворачивает стол 5 до тех пор, пока код, сформированный на выходах сенсоров 16, не сравняется с кодом, выставленным контроллером 63 на входе схемы 62 сравнения. На выходе схемы 62 сравнения сигнал исчезает и триггер 60 через инвертор 64 переводится з состояние логической «1. Этим сигналом через элемент И 56 первый триггер 48 переводится в состояние логического «О и пневмораспределитель 47 соединяет полость внешнего цилиндра 30 и через клапан 32 полость внутреннего 31 с сетью. Первым выдвигается шток 37 внутреннего цилиндра 31, так как пружина 38 обладает малой жесткостью. Во время движения штока 37 снимается пружина 38 и перемещающийся конусный толкатель 39, воздействуя на рычаги 40, сводит их и последние цепляют захват 8. После сжатия пру,жины 38 сила воздействия на внутренний цилиндр 31 превышает силу удержания фиксатора 35 и силовой цилиндр 30 перемещается в левое крайнее положение (показано на фиг. 2). При выходе клапана 32 из конусного отверстия 34 клапан 32 под действием пру- .жины 33 запирает в полости цилиндра 30 воздух и фиксирует шток 37 в левом положении. С перемещением внутреннего силового цилиндра 31 перемещается и зацепленный захват 8, который воздействует на заготовку 7, находящуюся в кассете, и перемещает ее на исходную позицию. При достижении заготовкой 7 исходной позиции срабатывает измеритель 14 исходного положения. Сигнал с выхода измерителя 14 через первый элемент И 49 переводит первый триггер 48 в состояние логической «1, а пнев15
20
25
30
Воздух выпускается, пружина 38 отводит шток 37 в исходное положение и рычаги 40 отпускают захват 8. Механизм 18 выдачи заготовок готов к повторной работе.
В процессе обработки заготовка 7 убирается с исходной позиции и сигнал с выхода измерителя 14 исчезает. Появившийся на выходе инвертора 57 сигнал через второй элемент И 56 переключает первый триггер 48 и механизм 18 выдачи заготовок устанавливает вновь заготовку 7 на исходную позицию. Этот процесс продолжается до тех пор, пока счетчик 65 (например, типа ИЕ 7) количества обработанных заготовок выдаст сигнал в виде логической «1, по выходу переноса контроллеру 63, который первоначально выдал информацию счетчику 65 на вход предварительной записи. Контроллер 63 переводится на следующий кадр программы Таким образом, осуществляется процесс управления работой автоматизированного уст-ройства выдачи заготовок.
Установление конусного толкателя на штоке с зазором позволяет исключить несимметричное воздействие рычагов на захват, что исключает смещение захвата и повышает точность позиционирования. Вы полнение клапана с двухконусным концом углы подъема конусов которого выполнены как 1:2, позволяет выполнить фиксацию щто ка внутренне1 о цилиндра в процессе выдачи заготовок из кассеты и освободить механизм выдачи заготовок от захвата в исходной позиции и, таким образом, подготовить его к работе с захватом следующей кассеты Это расширяет технологические возмож ности автоматизированного устройства и позволяет обслуживать кассеты с заготов ками различных типоразмеров и несколько единиц технологического оборудования.
Использование автоматизированного уст ройства выдачи заготовок позволяет повы сить в 1,5 раза производительность робото 50 технического комплекса, в составе которого устройство функционирует за счет автома тической переналадки на выдачу заготовок различных типоразмеров и обслуживани технологического оборудования.
55Формула изобретения
1. Автоматизированное устройство вы дачи заготовок, содержащее станину с уста
35
40
мораспределитель 47 переводит механизм 18 выдачи заготовок в исходное положение в следующем порядке. Воздух подается в левую полость внешнего цилиндра 30, внутренний цилиндр 31 перемещается в исходное положение (правое крайнее на фиг. 2). По достижении цилиндром 30 исходного положения клапан 32 вводится в конусное отверстие 34, фиксатор 35 поднимается и клапан 32, упираясь в стенку внешнего цилиндра 30,
уиирал, U v.,..,.j
открывает полость внутреннего цилиндра 31.
открывает полость внутреннего цилиндра 31.
П,,,rт,тлIJr л т r r ПГ4Л I .lf IJUd ЧХ ОТИОПЫТ
5
0
5
30
Воздух выпускается, пружина 38 отводит шток 37 в исходное положение и рычаги 40 отпускают захват 8. Механизм 18 выдачи заготовок готов к повторной работе.
В процессе обработки заготовка 7 убирается с исходной позиции и сигнал с выхода измерителя 14 исчезает. Появившийся на выходе инвертора 57 сигнал через второй элемент И 56 переключает первый триггер 48 и механизм 18 выдачи заготовок устанавливает вновь заготовку 7 на исходную позицию. Этот процесс продолжается до тех пор, пока счетчик 65 (например, типа ИЕ 7) количества обработанных заготовок выдаст сигнал в виде логической «1, по выходу переноса контроллеру 63, который первоначально выдал информацию счетчику 65 на вход, предварительной записи. Контроллер 63 переводится на следующий кадр программы. Таким образом, осуществляется процесс управления работой автоматизированного уст-ройства выдачи заготовок.
Установление конусного толкателя на штоке с зазором позволяет исключить несимметричное воздействие рычагов на захват, что исключает смещение захвата и повышает точность позиционирования. Выполнение клапана с двухконусным концом, углы подъема конусов которого выполнены как 1:2, позволяет выполнить фиксацию щто- ка внутренне1 о цилиндра в процессе выдачи заготовок из кассеты и освободить механизм выдачи заготовок от захвата в исходной позиции и, таким образом, подготовить его к работе с захватом следующей кассеты. Это расширяет технологические возможности автоматизированного устройства и позволяет обслуживать кассеты с заготовками различных типоразмеров и несколько единиц технологического оборудования.
Использование автоматизированного устройства выдачи заготовок позволяет повысить в 1,5 раза производительность робото- 50 технического комплекса, в составе которого устройство функционирует за счет автоматической переналадки на выдачу заготовок различных типоразмеров и обслуживание технологического оборудования.
55Формула изобретения
1. Автоматизированное устройство выдачи заготовок, содержащее станину с уста35
40
но$ленным на нем столом, на котором размещены по окружности кассеты для заготовок, механизм выдачи заготовок, включающий пневмопривод с захватным органом, пнфвмоприводной механизм поворота стола с зубчато-храповыми передачами, кнопку пуска, блокировочное устройство, датчики крайних положений привода поворота стола, наличия заготовок в кассете и наличия заго- ТОЕ1КИ на исходной позиции, контроллер, соединенный с кнопкой пуска, электромагнитную муфту и счетчик, соединенный входами и выходами с контроллером, отличающееся тем, что, с целью расширения технологиче- cKijix возможностей и повышения производи10
го и прямым выходом четвертого триггеров, прямой и инверсный выходы которых соответственно подключены к четвертому и пятому входам второго элемента И, выход элемента И-ИЛИ соединен с S-входом пятого триггера, выход которого подключен к управляющему входу механизма поворота стола, а / -вход - к выходу второго датчика крайних положений привода поворота стола, группа вторых выходов контроллера соединена с первой группой входов схемы сравнения, вторая группа входов которой соединена с датчиками положения поворотного стола, а выход через четвертый инвертор - с S-входом третьего триггера и непосредстни гельно введены датчики положения пово- ро -а стола, пять триггеров, схема сравнения, элементы логики, фототранзисторы и свето- диоды, причем управляющий вход механизма выдачи заготовок -подключен к выходу
те ьности оборудования, в устройство допол- венно с его / -входом, группа третьих выходов контроллера каждый через свой свето- диод подключена к обмотке электромагнитной муфты и S-входу четвертого триггера, -вход которого подключен к третьему входу контроллера и эмиттерам фототранзисторов, пе)вого триггера, S-вход которого подклю- 20 коллекторы которых подключены к источ- qeijj к выходу первого, а / -вход - к выходу нику питания блока управления, оптический
вход каждого фототранзистора связан оптической связью с соответствующим свето- диодом, кроме того, число связей каждой 25 группы входов схемы сравнения и группы вторых выходов контроллера равно числу датчиков положения поворотного стола.
2. Устройство по п. 1, отличающееся тем, что механизм выдачи заготовок выполнен 30 в виде двух соосных цилиндров, вложенных один в другой, при этом полости цилиндров разделены подпружиненным клапаном, один из концов которого выполнен двухконусным с отно1лением углов в основании :2, в основании внешнего цилиндра, обращённого
стйом и первым входом третьего элемента И, а S-вход соединен с выходом третьего элемента И, второй вход которого соединен с кнопкой пуска, второй вход первого элемента И подключен к датчику наличия заготовки на исходной позиции и через второй инвертор - к первому входу второго элемента: И, второй вход которого через третий инвертор соединен с датчиком наличия заготовок в кассете и счетным входом счетчика и непосредственно - с третьим входом перво|-о элемента И, третий вход второго эле-35 двухконусному концу клапана, выполнено
мейта И соединен с выходом первого дат-отверстие, в боковой стенке цилиндра, обчика крайних положений привода поворотаразованного этим отверстием, размеш.ен
и с первыми входами И элемента И-подпружиненный фиксатор, выступающий
ИЛИ, вторые входы И которого соединеныклиновидный конец которого имеет угол при
соответственно с инверсным выходом третье-вершине с коэффициентом асимметрии 0,5.
го и прямым выходом четвертого триггеров, прямой и инверсный выходы которых соответственно подключены к четвертому и пятому входам второго элемента И, выход элемента И-ИЛИ соединен с S-входом пятого триггера, выход которого подключен к управляющему входу механизма поворота стола, а / -вход - к выходу второго датчика крайних положений привода поворота стола, группа вторых выходов контроллера соединена с первой группой входов схемы сравнения, вторая группа входов которой соединена с датчиками положения поворотного стола, а выход через четвертый инвертор - с S-входом третьего триггера и непосредственно с его / -входом, группа третьих выходов контроллера каждый через свой свето- диод подключена к обмотке электромагнитной муфты и S-входу четвертого триггера, -вход которого подключен к третьему входу контроллера и эмиттерам фототранзисторов, коллекторы которых подключены к источ- нику питания блока управления, оптический
И
9 77 171ВЫ 4 t8
Фи
„ f
r-r /
.
:i2l
csmu
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство управления самоцентрирующим патроном | 1987 |
|
SU1491620A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Магазинное устройство | 1986 |
|
SU1424919A1 |
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
| Установка для индукционного нагрева и подачи на последующую обработку листовых заготовок | 1984 |
|
SU1268625A1 |
| Устройство для размещения штучных заготовок | 1987 |
|
SU1473885A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Устройство для подачи заготовок | 1981 |
|
SU984588A1 |
Изобретение относится к машиностроению и может быть использовано в гибких производственных системах при автоматизации листоштамповочного производства. Цель изобретения - расширение технологических возможностей и повышение производительности оборудования. Устройство содержит станину, поворотный стол с расположенными на нем радиально кассетами, механизм выдачи заготовок с захватным органом и блок управления устройством. Датчик положения поворотного стола выполнен в виде ряда сенсорных элементов, установленных на станине, напротив которых на поворотном столе по оси каждой кассеты выполнены чередующиеся выступы и впадины, количество и расположение кото1 Изобретение относится к машиностроению и может быть использовано в гибких производственных системах для автоматизации листоштамповочного производства. Цель изобретения - расширение технологических возможностей и повышение производительности оборудования. На фиг. 1 представлена конструкция устройства; на фиг. 2 - механизм выдачи заготовок, разрез; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - схема блока управления автоматизированного устройства. рых определяется числом кассет в двоичном коде. Внешняя управляющая система, например контроллер, выдает сигнал на подвод механизма выдачи заготовок к необходимому технологическому оборудованию. В блоке управления устройством включается необходимый источник света (светодиод). Поворот стола блоком управления производится до совмещения через оптическую систему источника света с соответствующим фототранзистором. Выдача заготовок производится механизмом с пневмоприводом, управление которым также производится МО сигналам с выхода блока управления. В результате работы схемы управления механизм выдачи заготовок производит полный цикл работы и подготавливается на переход к работе со следующим видом технологического оборудования или повторной выдаче заготовки из этой же кассеты. Автоматическая переналадка на выдачу заготовок различных типоразмеров и обслуживание различного оборудования устройством обеспечивается блоком управления. В него введены пять триггеров, схема сравнения, счетчик и элементы малой логики, соединенные между собой контроллером с кнопкой пуска и датчиками наличия заготовок . в кассете, а также на исходной позиции и датчиком положения стола. 1 з. п. ф-лы, 4 ил. Автоматизированное устрбйство выдачи заготовок включает (фиг. 1) станину 1 с установленным на ней посредством подшипников 2 и зафиксированным с помощью фик- 5 сатора 3 и пружины 4 поворотным столом 5, на котором по окружности размещены кассеты 6 с заготовками 7 и захватами 8, датчики наличия заготовки 7 в кассетах 6 и датчики наличия заготовки на исходной позиции, выполненные на основе контактов 9 и 10, (О (Л 4 сд со 00 10 пружин 11 и 12 и закрепленных на станине 1 по окружности измерителей 13 и 14.
ЦО 39 J7 38 j; SS 32 35 55
0m пмед ораспредела - Фие.г
теля
«
Ч м К схеме упрс1§лениА
X
Фиг.
w
г-у
| Устройство для подачи плоских заготовок в рабочую зону пресса | 1984 |
|
SU1238834A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для поштучной выдачи плоских заготовок из стопы в рабочую зону пресса | 1984 |
|
SU1215803A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
