Изобретение относится к робототехнике и может быть использовано в различных областях мшпиностроения.
Цель изобретения - сокращение цикла работы охвата и расширение его функциональных возможностей.
Предлагаемая конструктивная схема охвата за один рабочий ход механизма привода (без дополнительных движений руки робота) позволяет осуществить захват заготовки и отрыв ее от опоры На чертеже изображен схват, общий вид.
Схват робота содержит корпус 1, привод 2 прямолинейного движения (например, силовой цилиндр), с поверхностью 3 клина конечного элемента которого взаимодействуют посредством роликов 4 двуплечие захватные рычаги 5 с захватными губками 6.
Каждая захватная губка закреплена на рычаг е 5 посредством звеньев 7 и 8, являющихся боковыми звеньями па- раллелограммного механизма, Свобод- конец бокового звена 8 имеет возможность посредством ролика 9 контактировать с копирной поверхностью 10, выполненной на корпусе .
Пружина 11 обеспечивает постоянный контакт ролика 4 с поверхностью 3,клина, а пружина 12 - ролика 9 с копирной поверхностью О,
Устройство работает следующим образом.
При перемещении конечного злемек- та привода 2 прямолинейного движения клин воздействует на ролики 4 двуплечих захватных рычагов 5 и ттоворачи- зает их вокруг своих осей.
Вместе с рычагами 5 поворачиваются боковые звенья 7 и 8 паранлелогРедактор Н„Тупица Заказ 431/16
С о ст ази т ель Т Пинчук Техред МЛСодакич
Корректор Л.
Тираж 954 Подписное ВШШИ Государственного комитета СССР
по делам изобретений и открытий П3035, Москва, Ж-ЗЗ, Раушская набо,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
s
0
5
0
5
0
рамма, несущие захват тые губки 6, которые перемещаются до соприкосновения (захвата) с заготовкой 3. При этом свободный конец бокового звена 8 параллелограммного механизма контактирует с копирной поверхностью 10 корпуса 1 тем самым не давая возможности губкам 6 опуститься в крайнее нижнее положение.
При дальнейщем перемещении конечного элемента привода происходит дальнейший поворот захватных рычагов 5, дальнейший поворот боковых звеньев 7 и 8 и соответственно подъем губок 6 вместе с зажатой в них заготовкой 13. Происходит отрыв заготовки от поверхности опоры без дополнительных движений руки робота, оснащенной данным схватом, , за один рабочий ход механизма привода схвата.
Формула изобретения
Схват робота5 содержащий корпус, подпружиненные двуплечие рычаги, на одних плечах которых шарнирно установлены зажимные губки, вторые имеют возможность взаимодействия посредством ролика с клиновой поверхностью конечного элемента привода линейного перемещения, о т л и ч а ю- щ и и с я тем, что, с целью расширения его функциональных возможностей, калодая губка закреплена на упомянутом рычаге посредством параллелограммного механизма, одно из боковых звеньев которого расположено с возможностью взаимодействия с вы- полнен1Л)ГК на корпусе копиром и поджато с помощью пружины к последнему.
Корректор Л.Пилипенко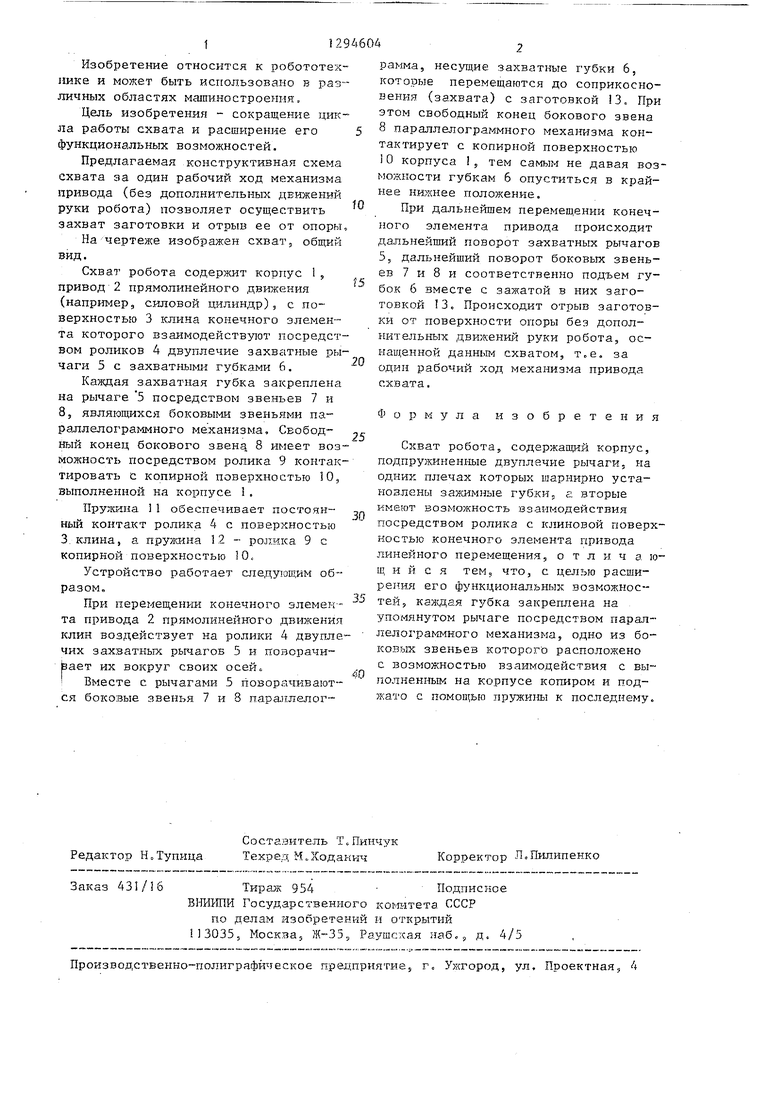
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1990 |
|
SU1773716A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА | 1991 |
|
RU2022778C1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват промышленного робота | 1985 |
|
SU1310204A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| Схват | 1986 |
|
SU1335450A1 |
| Захватное устройство | 1985 |
|
SU1240579A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
Изобретение относится к робототехнике и может быть использовано в различных областях машиностроения. Цель изобретения - сокращение рабочего цикла и расширение функциональных возможностей. При воздействии клиновой поверхности 3 привода 2 линейного перемещения на захватные рычаги 5 дврЕжение передается через па- раллелограммный механизм к захватным губкам 6, которые перемещаются до соприкосновения (захвата) с заготовкой 13. При этом свободный конец бокового звена 8 параллелограммного механизма контактирует с копиркой поверхностью 10 корпуса 1, не давая возможности захватным губкам 6 опускаться в крайнее нижнее положение. Конструктивная схема схвата позволя- , ет за один рабочий ход механизма привода осуществить захват заготовки и отрыв ее от опоры. 1 ил. i (Л го со 4 О) чх
| Схват манипулятора | 1982 |
|
SU1068281A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
