Изобретение относится к машиностроению и может быть использовано в качестве захватных устройств манипуляторов, предназначенных для механизации и автоматизации погрузочно-раз- грузочных работ объектов, имеющих отверстие.
Целью изобретения является расширение технологических возможностей за сЧет того, что все взаимосвязанные конструктивные элементы захвата для деталей с отверстием обеспечивают до- ориентирование и надежный захват деталей независимо от присутствия ферромагнитного материала.
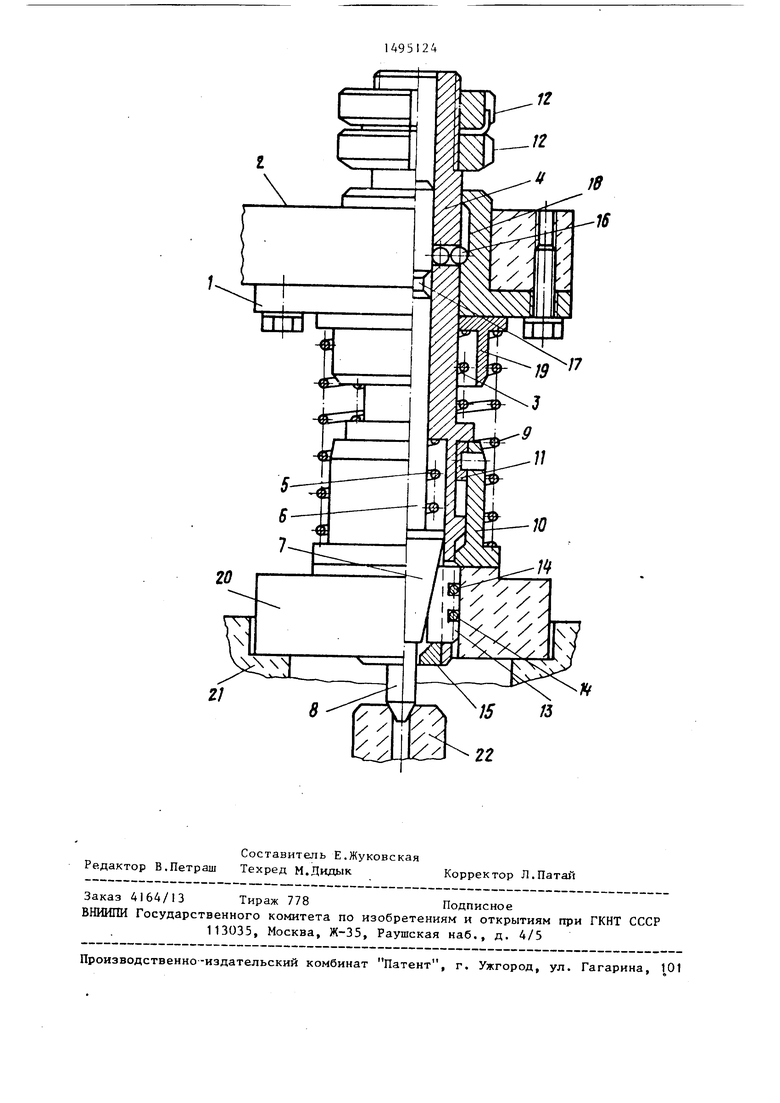
На чертеже показан захват для деталей с отверстием, центральный разрез .
Захват состоит из основания 1, закрепленного на руке 2 манипулятора.
В центральное отверстие основания 1 установлен с возможностью перемещения трубчатый подпрузкиненный пружиной 3 корпус 4. В корпусе 4 подвижно установлен подпружиненный пружиной 5 шток 6, включающий два элемента - конический упор 7 и упор 8. Снаружи на корпусе 4 установлен подпружиненный .пружиной 9 упор 10 с ограничителем И. На резьбовой части корпуса 4 навинчены гайки 12, ограничивающие его
4 О Сд
Ю
4
31495
перемещение вниз . В радиальных пазах корпуса 4 установлены губки 13, поджатые пружинами 14. Для исключения выпадания губок 13 в центральное от- верстие корпуса 4 запрессовано кольцо 15. В верхней части корпуса 4 в радиально расположенных отверстиях заложены шарики 16. На наружной поверхности штока 6 и на поверхности центрального отверстия основание t выполне1лы кольцевые проточки 17 и 18, которые.при взаимодействии с шариками 16 фиксируют положение штока 6 относительно корпуса 4, а корпус 4 от- носительно основания 1. На центральную часть корпуса 4 установлен стакан 19, подпружиненный пружиной 9. Деталь 20 установлена на ложементе 21. На позиции разгрузки - стержень 22. Захват работает следующим образом Исполнительный механизм манипулятора опускает руку 2 с захватом к ложементу 21, на котором установлена деталь 20. В этот момент упор 10 на- ходится под действием пружины 9 в нижнем положении, упираясь ограничителем 11 в нижний бурт корпуса 4, губки 13 пружинами 14 сжаты, шток 6 зафиксирован на корпусе 4 шарикаг-ш 16, корпус 4, в свою очередь, находится в нижнем положении, гайкой 12 опираясь на верхнюю поверхност ь основания 1 .
При движении вниз упор 10 нижним торцом соприкасается с деталью 20, а исполнительный механизм гфодолжает опускать корпус 4 до соприкосновения с верхним торцом упора 10. Далее основание 1 продолжает смещаться отно- сительно корпуса 4 и штока 6, засЬик- сированного шариками 16 в верхнем положении, на величину, необходимукг дл того, чтобы под действием пружины 5 шток 6 скосом проточки 17 выжал шари ки I6 в кольцевую проточку 18 основания 1. Освободившийся шток 6 идет вниз и коническим упором 7 разжимает губки 13, которые зажимают деталь 20 В этот момент корпус 4, относительно которого опускается основание 1, при подходе шариками 16 к верхней кромке проточки 18 на основании 1 воздействует на датчик (не показан ), подаю- Щ1Ш команду в схему управления на подъем руки 2.
0 5 .
5
При движении руки 2 вверх деталь 20 в этот момент садится на корпус 4, зажатая губками 13, а упор 10 ограничен от перемещения вниз верхним краем губок 13, корпус 4 опускается относительно основания 1 на величину, ограниченную шириной проточки 18, в край которой упираются шарики 16. При подходе к месту разгрузки упор 8 упи-- рается в стержень 22 и останавливается .
При дальнейшем перемещении захвата вниз конический упор 7 отходит от губок 13, и последние под действием пружин 14 утапливаются, разжимая деталь 20, и освобождают упор 10, который под действием пружины 9, верхний конец которой центрируется стаканом 19, сбрасывает деталь 20. Для удержания губок 13 от выпадания предусмотрено запрессованное кольцо 15. Движение захватного устройства продолжается до тех пор, пока шарики 16 в корпусе 4 не подойдут к проточке 17 на штоке 6. При этом под действием пружины 3 краем проточки 18 основания 1 шарики 16 вытесняются в проточку 17 штока 6, который получает фиксированное положение относительно корпуса 4.
Формула изобретения
Захват дпя деталей о отверстием, содержащий основание, коаксиально расположенные в нем с возможностью линейного перемещения подпружиненный относительно основания полый корпус и подпружиненный относительно корпуса шток с коническим упрром на рабочем конце, а также захватные элементы, отличающийся тем, что, с целью расширения технологических возможностей, на штоке и внутренней поверхности основания выполнены кольцевые проточки, а в корпусе выполнены радиальные отверстия, в которых установлены дополнительно введенные шарики, имеющие возможность поочередного расположения в кольцевых проточках штока и основания, при этом в иижней части корпуса выполнены радиальные прорези, в которых расположены зажим- iJbie элементы с возможностью взаимо- Действия с коническим упором штока.
Zl
12
щ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И УСТАНОВКИ ДЕТАЛЕЙ | 1991 |
|
RU2010692C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Схват манипулятора | 1989 |
|
SU1684028A1 |
| Захватное устройство | 1980 |
|
SU899325A1 |
| Захват | 1980 |
|
SU905061A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Схват | 1983 |
|
SU1138313A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Захватное устройство | 1987 |
|
SU1414636A1 |
| ЗАХВАТ ДЛЯ ИЗДЕЛИЙ С ОТВЕРСТИЕМ | 1992 |
|
RU2045377C1 |
Изобретение относится к машиностроению и может быть использовано в качестве захватных устройств манипуляторов. Цель изобретения - расширение технологических возможностей за счет того, что все взаимосвязанные конструктивные элементы захвата для деталей с отверстием обеспечивают доориентирование и надежный захват деталей независимо от присутствия ферромагнитного материала. Захват для деталей с отверстием содержит основание с установленным в нем с возможностью перемещения полым подпружиненным корпусом, подпружиненный относительно корпуса шток, включающий два элемента конический упор. Новым в захвате является то, что в верхней части корпуса имеется радиально расположенный ряд отверстий с шариками, поочередно взаимодействующими с кольцевыми проточками, имеющимися на штоке, и внутренней поверхностью основания, определяющими расположение деталей устройства относительно друг друга, а в нижней части полого корпуса в радиальных прорезях установлены подпружиненные губки с возможностью взаимодействия с коническим упором подпружиненного штока. 1 ил.
| Захват для деталей с отверстиями | 1979 |
|
SU870112A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
