Изобретение относится к машино - строению и может быть использовано в робототехнике.
Цель изобретения - расширение технологических возможностей за счет возможности захвата деталей типа коробки через отверстия в ее верхней грани.
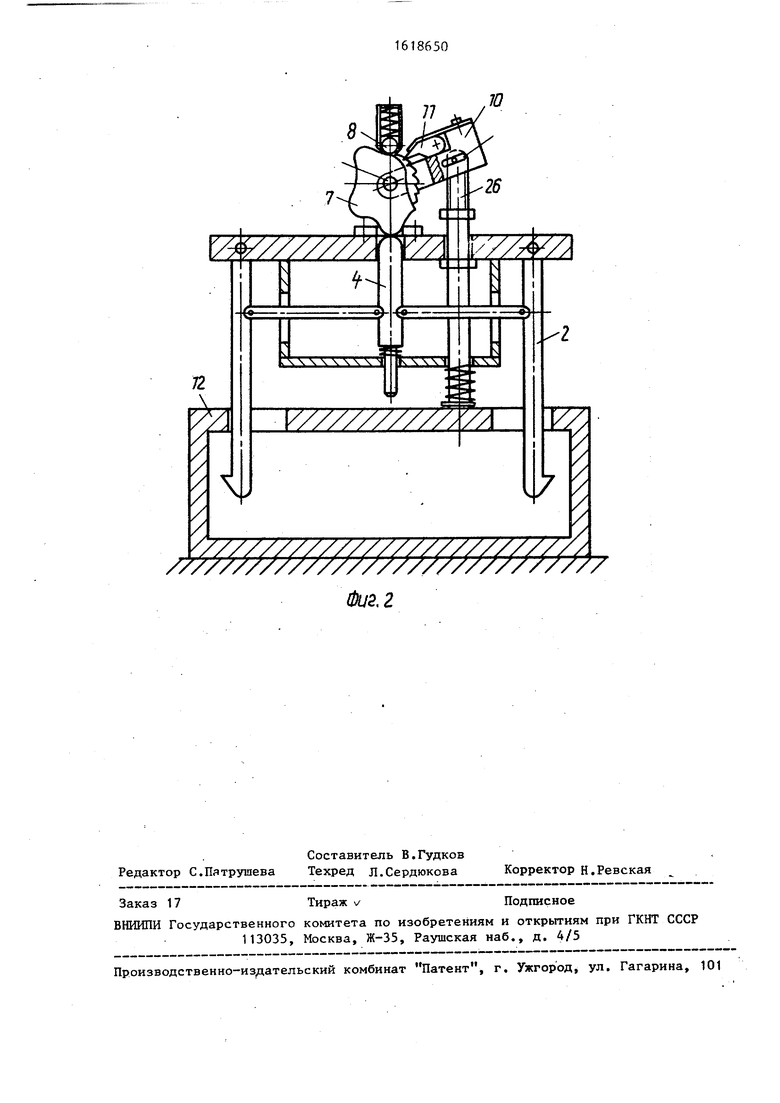
На фиг.1 изображен схват, общий вид, зажимные, рычаги сведены; на фиг.2 - то же, зажимные рычаги разведены.
Схват сборочного манипулятора содержит корпус 1, зажимные рычаги 2 с выступами 3, подпружиненный запирающий шток 4, соединенный с помощью тяг 5 с рычагами 2, а также подпружиненный упор 6. На корпусе 1 над што- «ком 4 размещен кулачок 7 с фиксато- ром 8, На одной оси с кулач- йом 7 размещено храповое колесо 9, с которым взаимодействуют поворотная .защелка 1Q с собачкой 11, размещенная на верхнем конце упора 6. .
Схват работает следующим образом.
Схват позиционируется под деталью типа коробки 12 так, чтобы выступы 3 сведенных рычагов 2 располагались над отверстиями в верхней грани ко- робки 12. Затем манипулятор опускает схват до взаимодействия упора 6 с верхней гранью коробки 12. При дальнейшем опускании схвата упор 6 (поднимается над корпусом 1, и защелк 10 поворачивает храповое колесо 9 на такой угол, что со штоком 4 взаимдействует выступ кулачка 7 (фиг.2). Благодаря этому шток 4 опускается
5
0
0 5 0
5 0
и разводит рычаги 2. Далее схват перемещается вверх и переносит коробку 12, которая опирается на выступы 3j на сборочную позицию. На сборочной позиции схват устанавливает коробку 12 в собираемое изделие и продолжает движение вниз. При этом упор 6 вновь перемещается вверх, и защелка 10 поворачивает храповое колесо 9 на такой угол, что напротив штока 4 располагается впадина кулачка 7. В результате шток 4 поднимается и сводит рычаги 2, после чего схват возвращается в верхнее исходное положение. Далее цикл работы схвата повторяется. Формула изобретения
Схват сборочного манипулятора, содержащий корпус, зажимные рычаги с захватными губками, запирающий шток, а также подпружиненный относительно корпуса упор с поворотной защелкой и храповым колесом, размещенным на корпусе, о т л и ч а ю- щ и и с я тем, что, с целью расширения технологических возможностей, схват снабжен тягами, соединенными одним концом с зажимными рычагами,а другим концом с запирающим штоком, а также кулачком, жестко закрепленным на одной оси с храповым колесом, кроме того, захватные губки выполнены в виде выступов на наружной поверхности зажимных рычагов, которые размещены на корпусе, а запирающий шток подпружинен относительно корпуса и имеет возможность взаимодействия с упомянутым кулачком.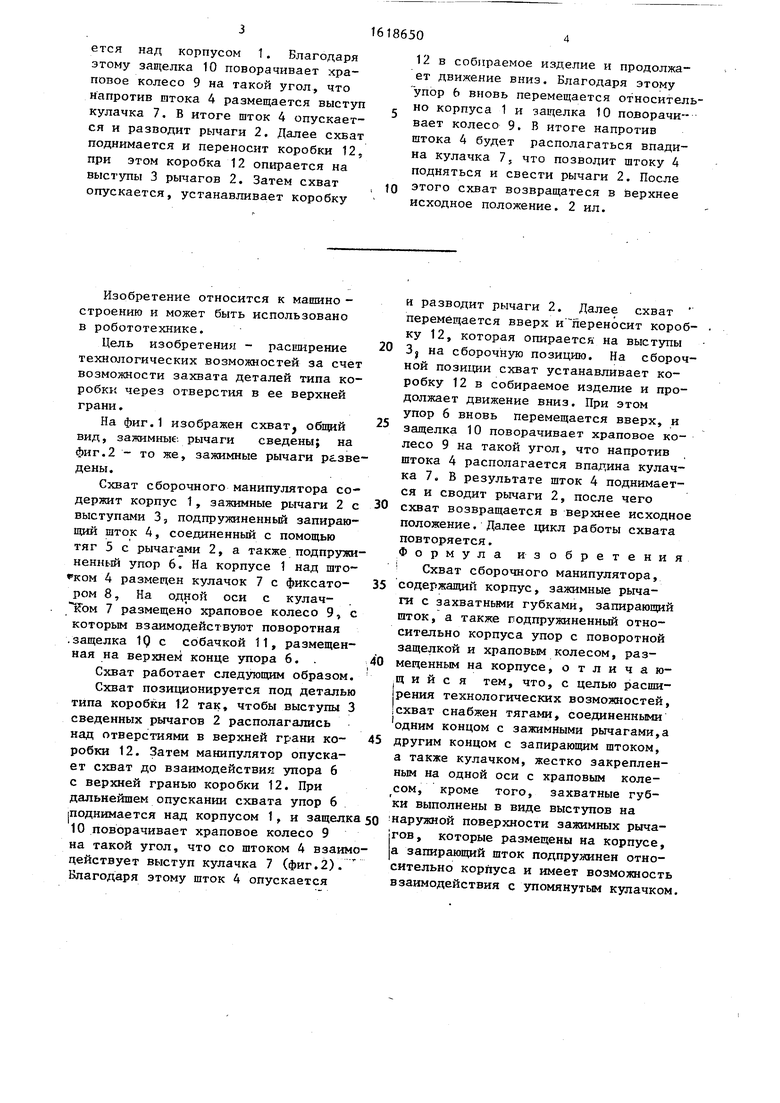
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Схват | 1983 |
|
SU1138313A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Схват манипулятора | 1985 |
|
SU1498608A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
; изобретение относится к машино- строению Ъ позволяет расширить технологические возможности за счет возможности захвата деталей типа коробка через отверстия в ее верхней грани.Вначале схват, рычаги 2 которого сведены,позиционируется над от- верстиями в коробке 12. Затем .схват опускается вниз, при этом упор 6 взаимодействует с поверхностью коробки 12 и поднима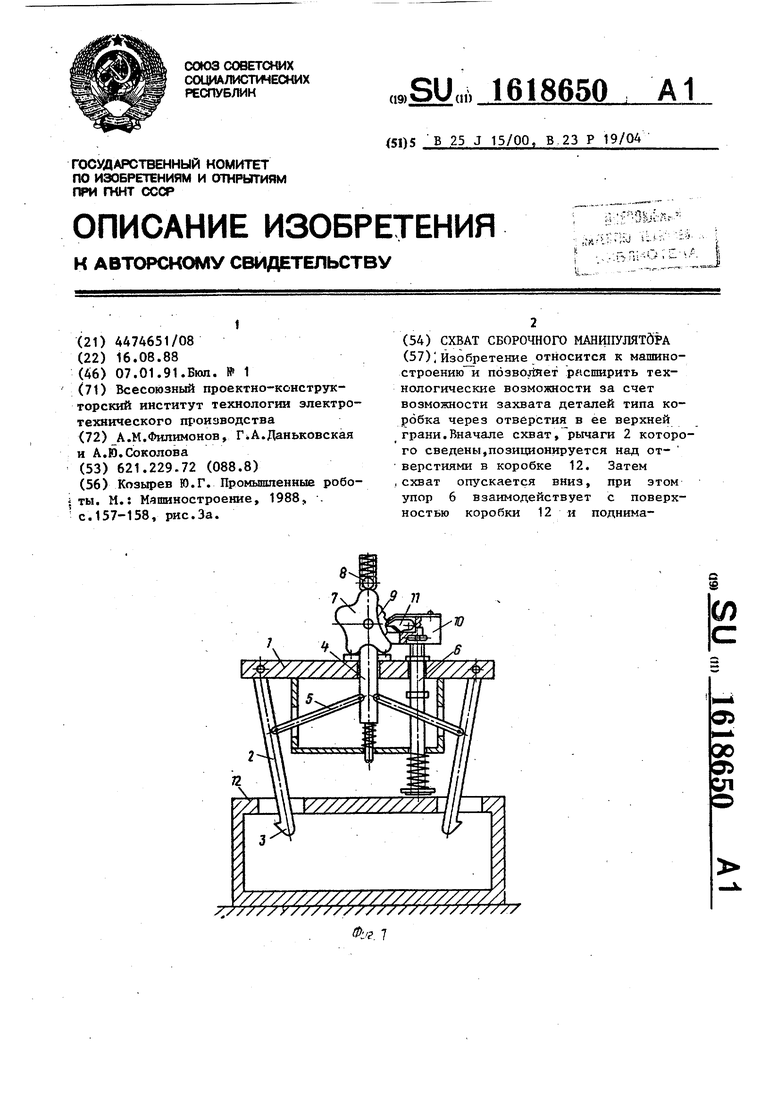
| Козырев Ю.Г | |||
| Промышленные робо- -; ты | |||
| М.: Машиностроение, 1988, | |||
| Соломорезка | 1918 |
|
SU157A1 |
