Изобретение относится к автотракторной промышленности, в частности к средствам, предназначенным для работы в условиях горного рельефа.
Цель изобретения - повышение устойчивости и приспосабливаемости к неровностям поверхности движения.
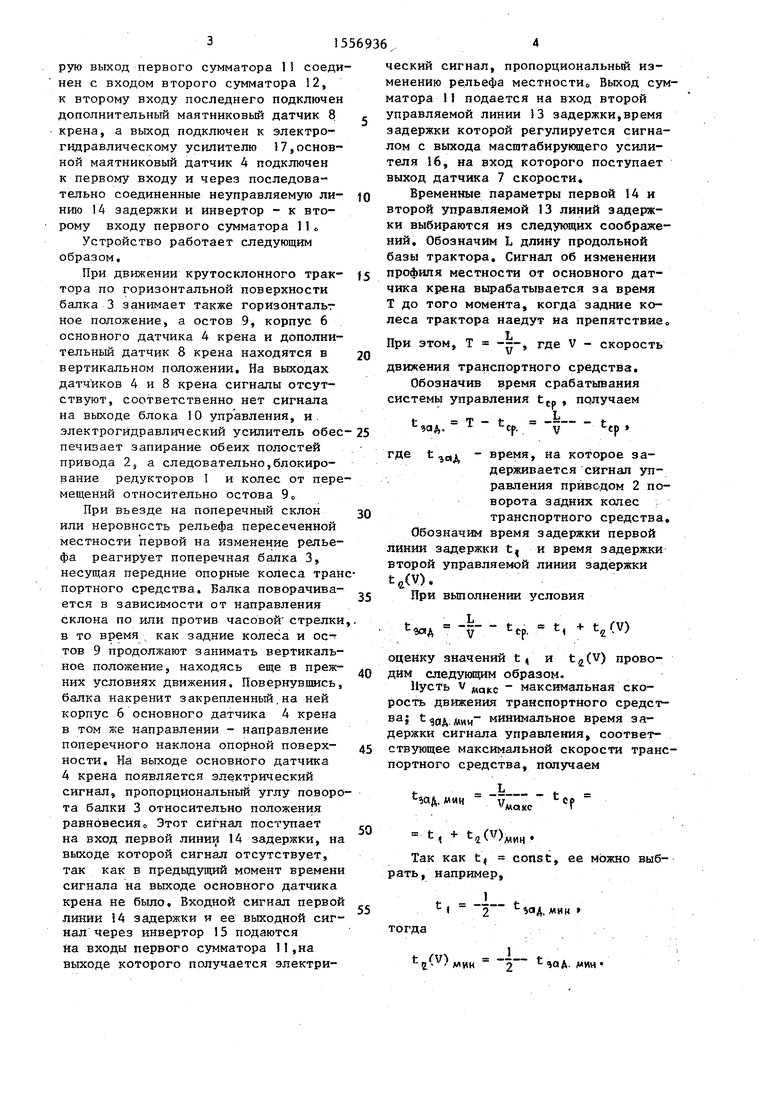
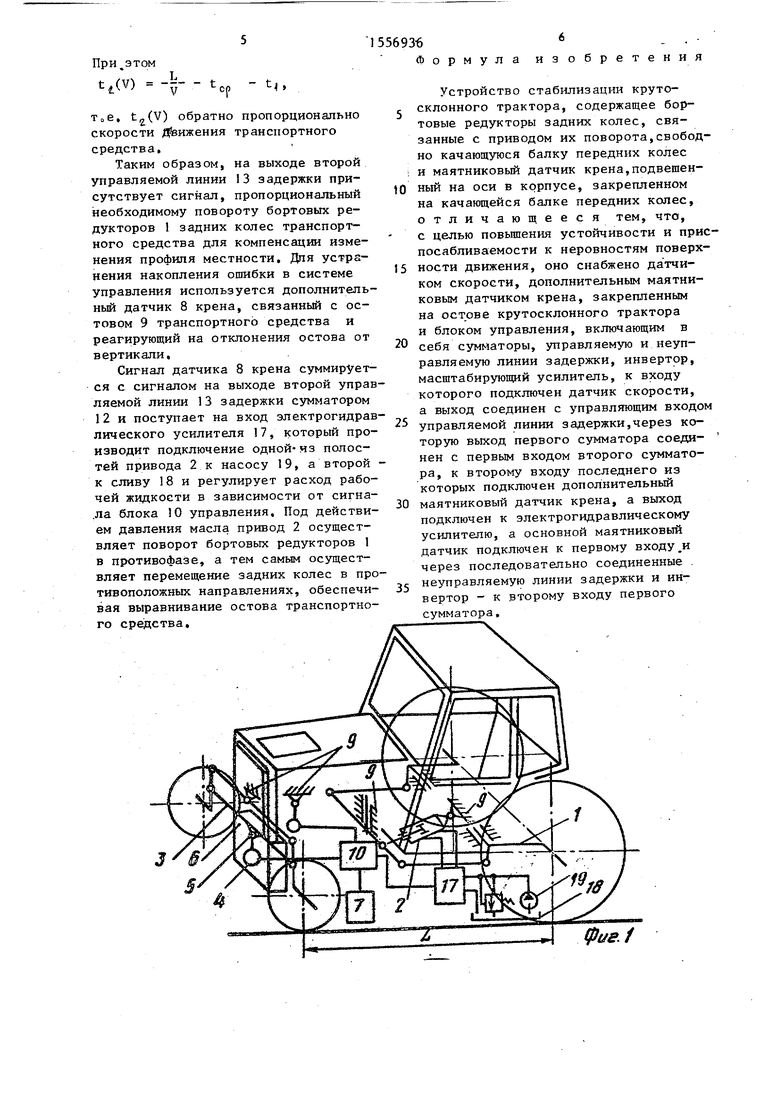
На фиг,1 изображено предлагаемое устройстве стабилизации крутосклонного трактора; на фиг0 2 - функциональная схема блока управления.
Устройство стабилизации крутосклонного трактора содержит бортовые редукторы 1 задних колес, связанные с приводом 2 их поворота, свободно
качающуюся балку 3 передних колес и маятниковый датчик 4 крена,подвешенный на оси 5 в корпусе 6, закрепленном на качающейся балке 3 передних колес, датчик 7 скорости,дополнительный датчик 8 крена, закреплен-, ный на остове 9 крутосклонного трактора, и блок 10 управления, включающий в себя сумматоры 11 и 12,управляемую 13 и неуправляемую 14 линии задержки, инвертор 15, масштабирую- ( щий усилитель 16, к входу которого подключен датчик 7 скорости, а выход соединен с управляющим входом управляемой линии 13 задержки, через кото&1
ЈП
зд
рую выход первого сумматора 1I соединен с входом второго сумматора 12, к второму входу последнего подключен дополнительный маятниковый датчик 8 крена, а выход подключен к электрогидравлическому усилителю 17,основной маятниковый датчик 4 подключен к первому входу и через последовательно соединенные неуправляемую линию 14 задержки и инвертор - к второму входу первого сумматора 11„ Устройство работает следующим образом.
При движении крутосклонного трактора по горизонтальной поверхности балка 3 занимает также горизонтальт ное положение, а остов 9, корпус 6 основного датчика 4 крена и дополнительный датчик 8 крена находятся в вертикальном положении. На выходах датчиков 4 и 8 крена сигналы отсутствуют, соответственно нет сигнала на выходе блока 10 управления, и электрогидравлический усилитель обеспечивает запирание обеих полостей привода 25 а следовательно,блокирование редукторов 1 и колес от перемещений относительно остова 90
При вьезде на поперечный склон или неровность рельефа пересеченной местности первой на изменение рельефа реагирует поперечная балка 3, несущая передние опорные колеса тран портного средства. Балка поворачивается в зависимости от направления склона по или против часовой стрелки в то время как задние колеса и остов 9 продолжают занимать вертикальное положение, находясь еще в прежних условиях движения. Повернувшись, балка накренит закрепленный.на ней корпус 6 основного датчика 4 крена в том же направлении - направление поперечного наклона опорной поверхности. На выходе основного датчика 4 крена появляется электрический сигнал, пропорциональный углу поворота балки 3 относительно положения равновесия Этот сигнал поступает на вход первой линии 14 задержки, на выходе которой сигнал отсутствует, так как в предыдущий момент времени сигнала на выходе основного датчика крена не было. Входной сигнал первой линии 14 задержки и ее выходной сигнал через инвертор 15 подаются на входы первого сумматора 11,на выходе которого получается электри
ческий сигнал, пропорциональный изменению рельефа местности„ Выход сумматора 1I подается на вход второй управляемой линии 13 задержки,время задержки которой регулируется сигналом с выхода масштабирующего усилителя 6, на вход которого поступает выход датчика 7 скорости.
Временные параметры первой 4 и второй управляемой 13 линий задержки выбираются из следующих соображений. Обозначим L длину продольной базы трактора. Сигнал об изменении профиля местности от основного датчика крена вырабатывается за время Т до того момента, когда задние колеса трактора наедут на препятствие,,
При этом, Т П гДе - скорость
движения транспортного средства.
Обозначив время срабатывания
системы управления tcp , получаем
,
Т - t
сг
„ tt|) f
где t гйд - время, на которое задерживается сигнал управления приводом 2 поворота задних колес транспортного средства. Обозначим время задержки первой
линии задержки Ц и время задержки
второй управляемой линии задержки
).
При выполнении условия
у fccp.
е t,
+ te(V)
оценку значений t , и t2(V) проводим следующим образом.
Пусть v ,цакс - максимальная скорость движения транспортного средства; t эдд мич минимальное время задержки сигнала управления, соответствующее максимальной скорости транспортного средства, получаем
V,
- t
мохе
cf
50
- ti + 4(VW
Так как t const, ее можно выбрать, например,
55
t- - -1 - t
u « 2 аА. «ии
тогда
чоо
мин
2 fc WA. мин
Принтом
tt(v) .-a- - t - tb
L
f
т„е, t(V) обратно пропорционально скорости Движения транспортного средства.
Таким образом, на выходе второй управляемой линии 13 задержки присутствует сигнал, пропорциональный необходимому повороту бортовых редукторов 1 задних колес транспортного средства для компенсации изменения профиля местности. Для устранения накопления ошибки в системе управления используется дополнительный датчик 8 крена, связанный с остовом 9 транспортного средства и реагирующий на отклонения остова от вертикали,
Сигнал датчика 8 крена суммируется с сигналом на выходе второй управляемой линии 13 задержки сумматором 12 и поступает на вход электрогидравлического усилителя 17, который производит подключение одной чз полостей привода 2 к насосу 19, а второй к сливу 18 и регулирует расход рабочей жидкости в зависимости от сигна- .ла блока 10 управления. Под действием давления масла привод 2 осуществляет поворот бортовых редукторов 1 в противофазе, а тем самым осуществляет перемещение задних колес в противоположных направлениях, обеспечивая выравнивание остова транспортного средства.
орм
у л а
6
изо
бретения
0
Устройство стабилизации круто- , склонного трактора, содержащее бортовые редукторы задних колес, связанные с приводом их поворота,свободно качающуюся балку передних колес и маятниковый датчик крена,подвешен0 ный на оси в корпусе, закрепленном на качающейся балке передних колес, отличающееся тем, что, с целью повышения устойчивости и прис- посабливаемости к неровностям поверх5 ности движения, оно снабжено датчиком скорости, дополнительным маятниковым датчиком крена, закрепленным на остове крутосклонного трактора и блоком управления, включающим в себя сумматоры, управляемую и неуправляемую линии задержки, инвертор, масштабирующий усилитель, к входу которого подключен датчик скорости, а выход соединен с управляющим входом
5 управляемой линии задержки,через которую выход первого сумматора соеди- нен с первым входом второго сумматора, к второму входу последнего из которых подключен дополнительный
0 маятниковый датчик крена, а выход подключен к электрогидравлическому усилителю, а основной маятниковый датчик подключен к первому входу.и через последовательно соединенные
5 неуправляемую линии задержки и инвертор - к второму входу первого сумматора.
(&«/
11
13
17
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство для работы на склонах | 1982 |
|
SU1133126A1 |
| Устройство для предотвращения бокового крена транспортного средства | 1987 |
|
SU1507599A1 |
| Крутосклонное колесное транспортное средство | 1988 |
|
SU1593986A1 |
| Крутосклонный трактор | 1977 |
|
SU683932A1 |
| Крутосклонный трактор | 1977 |
|
SU663610A1 |
| Устройство для предотвращения бокового крена транспортного средства | 1990 |
|
SU1754492A1 |
| Автомат-стабилизатор управления гидроцилиндром двойного действия остова транспортного средства | 1988 |
|
SU1602794A1 |
| Бортовой редуктор колесного крутосклонного трактора | 1984 |
|
SU1232515A1 |
| Колесное транспортное средство для работы на склонах | 1981 |
|
SU986815A1 |
| Крутосклонный трактор | 1977 |
|
SU701857A1 |
Изобретение относится к автотракторной промышленности, в частности к средствам, предназначенным для работы в условиях горного рельефа, и позволяет повысить устойчивость движения транспортного средства, безопасность водителя и сохранность перевозимых грузов путем своевременной отработки дорожных возмущений. Устройство содержит бортовые поворотные редукторы с приводом, основной и дополнительный маятниковые датчики крена, датчик скорости и блок управления. При наезде передних колес транспортного средства на неровность или на склон основной маятниковый датчик крена выдает сигнал об изменении профиля местности, блок управления в соответствии со скоростью движения трактора формирует управляющее воздействие и момент его выдачи для компенсации дорожного возмущения. Дополнительный датчик крена обеспечивает компенсацию накопленной ошибки управления. Блок управления содержит сумматоры, линии задержки, инвертор, масштабирующий усилитель. 2 ил.
фиг. 2
S
| Устройство компенсации бокового крена транспортного средства | 1984 |
|
SU1220937A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
