7/
33
3 И
0
сд
о со о ел
.-
2150
Изобретение относится к устройствам для перемещения изделий, в частности к транспортным системам, в состав которых входит распределительная приводная криволинейная секция , и может быть использовано в автоматических линиях, в гибких производственных системах на гибких переналаживаемых участках для межопера- ционных перемещений деталей.
Цель изобретения - повьппение производительности и надежности работы секции.
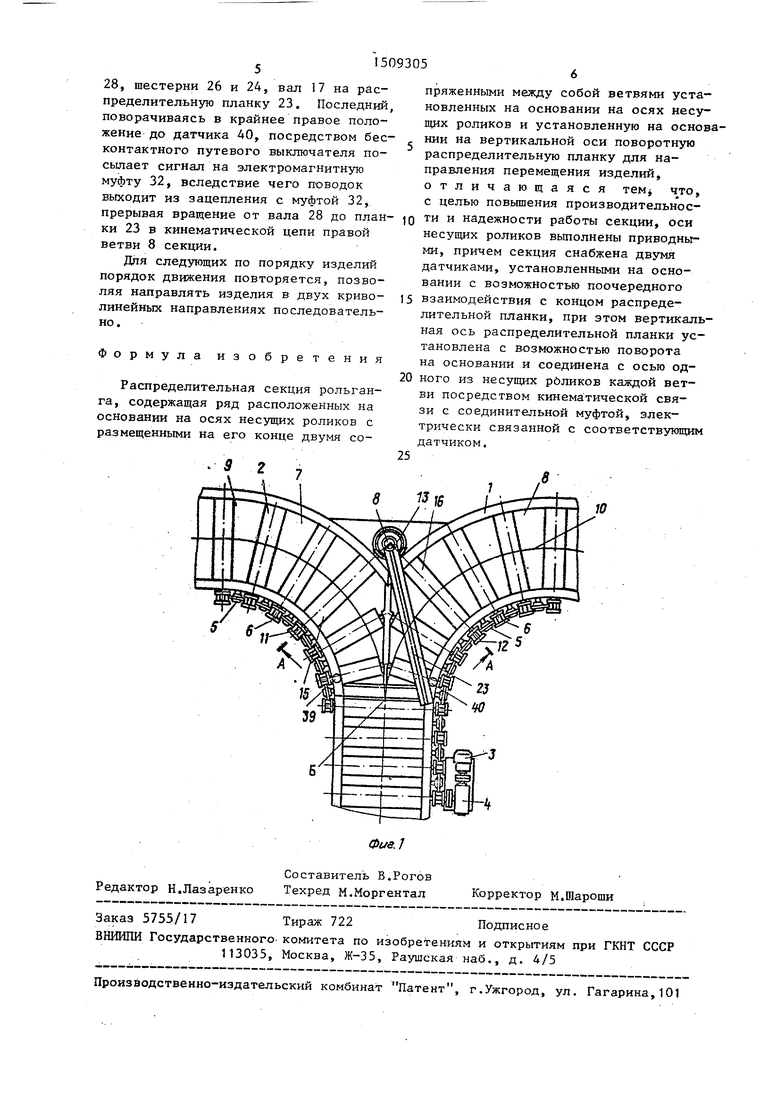
На фиг. 1 изображена распредели- тельная секция рольганга; на фиг,2- разрез А-А на фиг. 1.
Распределительная секция рольганга содержит установленный на основании 1 на осях ряд несущих роли- ков 2, связанных с электродвигателем 3, редуктором 4 и приводом ролийов, состоящим из паразитных звездочек 5 и двухвенечных дисков. 6. Секция содержит размещенные на конце ряда ро ликов 2 две сопряженные между собой ветви 7 и 8, установленные на основании 1 на осях несущих роликов 2.
Линии 9 и 10 кривизны ветвей 7 и 8 разнонаправлены, причем начало их находится в точке Б. Один из двухвенечных дисков 11 и 12 соответственно левой 7 и правой 8 частей сек- гщи кинематически связан с распределительным механизмом 13, установ- ленная на основании 1 вертикальная ось 14 которого находится в точке пересечения В осей 15 и 16 вращения связанных с распределительным механизмом 13 двухвенечных дисков 11 и 12. Ось 14 поворота перпендикулярна плоскости, образуемой осями 15 и 16, и установлена с возможностью поворота на основании 1.
Распределительный механизм 13 состоит из вала 17; который установлен на корпусе 1 секции посредством основания 18, подшипников 19 и 20, болта 21, шайбы 22. На валу 17 закреплена распределительная планка 2 шестерня 24, которая связана с двух венечными дисками 11 и 12 посредств шестерен 25 и 26 валой 27 и 28 повоков 29 и 30 соединительных муфт 31 и 32, валов 33 и 34 несущих роликов 2. Валы 27 и 28 установлены в корпусах 35 и 36 при помощи подшипников 37 и 38. Корпусы 35 и 36 жестко закреплены на корпусе секции.
25
Q
15
20
30 35 40
45 , JQ м 55На основании 1 установлены датчики 39 и 40 с возможностью поочередного взаимодействия с концом распределительной планки 23. Датчики 39 и 40 электрически связаны с муфтами 31 и 32.
Распределительная секция работает следующим образом.
Электродвигатель 3 посредством редуктора 4 приводит в действие паразитные звездочки 5 и двухвеиечные диски 6 привода вращения роликов левой 7 и правой 8 ветвей секции. Взаимодействуя между собой, паразитные звездочки 5 и двухвенечные диски 6 вращают несущие ролики 2, которые перемещают транспортируемое изделие (не показано).
Изделие, перемещаясь по секции,в точке Б упирается в распределительную планку 23, находящуюся в крайнем правом положении, и поворачивается по линии 9 кривизны левой ветви 7 секции, продолжая свое движение. При прохождении оси 15 несущего ролика 2 изделие, взаимодействуя с бесконтактным путевым выключателем (не показан), посылает сигнал на электромагнитную муфту 31, которая, втягивая в себя поводок 29, передает вращение от двухвенечного диска 11 через вал 33 несущего ролика 2, вал 27, шестерни 25 и 24, вал 17 на распределительную планку 23. Последний, поворачиваясь в крайнее левое положение до датчика 39, посредством бесконтактного путевого выключателя посылает сигнал на электромагнитную муфту 31, вследствие чего поводок 29 выходит из зацепления с муфтой 31, прерывая вращение от вала 27 до планки 23 в кинематической цепи левой ветви 7 секции.
Следующее по .порядку следования изделие, перемещаясь по секции, в точке Б упирается в распределительную планку 23, находящуюся в крайнем левом положении, и поворачивается по линии 10 кривизны правой ветви 8 секции, продолжая свое движение. При продолжении оси 16 несущего ролика 2 изделие, взаимодействуя с бесконтактным путевым выключателем (не показан) , посылает сигнал на электромагнитную муфту 32, которая, втягивая в себя поводок 30, передает вращение от двухвенечного диска 12. через вал 34 несущего ролика 2,.вал
28, шестерни 26 и 24, вал 17 на распределительную планку 23. Последний, поворачиваясь в крайнее правое положение до датчика 40, посредством бесконтактного путевого выключателя по- сьшает сигнал на электромагнитную муфту 32, вследствие чего поводок выходит из зацепления с муфтой 32,
пряженными между собой ветвями установленных на основании на осях несущих роликов и установленную на основании на вертикальной оси поворотную распределительную планку для направления перемещения изделий, отличающаяся тем что, с целью повышения производительнос
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтомат для стачивания деталей швейных изделий по заданному контуру | 1976 |
|
SU654711A1 |
| Устройство для передачи штучных грузов к транспортно-складским конвейерам | 1990 |
|
SU1757974A1 |
| Накопитель изделий | 1976 |
|
SU745717A1 |
| Устройство для сварки изделий из полимерных материалов | 1981 |
|
SU1031743A1 |
| Распределительный роликовый конвейер | 1989 |
|
SU1680595A1 |
| Устройство для непрерывной намотки на катушку нитеобразных материалов | 1974 |
|
SU691225A2 |
| Устройство для непрерывной намотки нитевидного материала на катушки | 1977 |
|
SU679500A1 |
| Устройство для резки прокладокдля пОдплЕчиКОВ из пОРиСТОгО MATE-РиАлА | 1977 |
|
SU827292A2 |
| Устройство для автоматической сборки составных частей химических источников тока | 1991 |
|
SU1790016A1 |
| Устройство для накопления и выдачи длинномерных изделий | 1981 |
|
SU1009946A1 |
Изобретение относится к транспортным системам и может быть использовано в автоматических линиях в гибких производственных системах для межоперационных перемещений деталей. Цель - повышение производительности и надежности секции. На основании 1 на осях расположен ряд несущих роликов (Р) 2. На его конце размещены сопряженные ветви Р 2. На основании 1 на вертикальной оси 14 установлена поворотная распределительная планка (П) 23 для направления изделий. Оси Р 2 выполнены приводными. На основании 1 установлены с возможностью поочередного взаимодействия с П 23 два датчика (Д) 39 и 40. Ось 14 установлена с возможностью поворота на основании 1 и соединена кинематически с осью одного из Р 2 муфтой 31 (32), связанной с Д 39 (40). Изделие посредством привода перемещается по Р 2. При соприкосновении с П 23 оно поворачивает на одну из ветвей Р 2. При соприкосновении изделия с Д 39 подается сигнал на муфту 31, которая поворачивает П 23 в противоположное направление. Следующее изделие при этом перемещается по другой ветви Р 2. 2 ил.
прерывая вращение от вала 28 до план- Q тн и надежности работы секции, оси
ки 23 в кинематической цепи правой ветви 8 секции.
Для следующих по порядку изделий порядок движения повторяется, позволяя направлять изделия в двух криволинейных направлениях последовательно.
Формула изобретения
Распределительная секция рольганга, содержащая ряд расположенных на основании на осях несущих роликов с размещенными на его конце двумя сонесущих роликов вьшолнены приводными, причем секция снабжена двумя датчиками, установленными на основании с возможностью поочередного
15 взаимодействия с концом распределительной планки, при этом вертикал ная ось распределительной планки ус тановлена с возможностью поворота на основании и соединена с осью од20 ного из несущих рбликов каждой ветви посредством кинематической связи с соединительной муфтой, электрически связанной с соответствующи датчиком,
несущих роликов вьшолнены приводными, причем секция снабжена двумя датчиками, установленными на основании с возможностью поочередного
15 взаимодействия с концом распределительной планки, при этом вертикальная ось распределительной планки установлена с возможностью поворота на основании и соединена с осью од20 ного из несущих рбликов каждой ветви посредством кинематической связи с соединительной муфтой, электрически связанной с соответствующим датчиком,
25
| Ивановский К.Е., Раковщик А.Н | |||
| и Доглин А.Н | |||
| Роликовые и дисковые конвейеры и устройства | |||
| - М.: Машиностроение, 1973, с | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| П | |||
