Изобретение относится к машиностроению, в частности к механизации и автоматизации производственных процессов и может быть использовано в приводах по движных звеньев автооператоров, обслуживающих несколько объектов
Цель изобретения -увеличение технологических возможностей устройства.
Поставленная цель достигается тем, что в устройстве с приводим перемещения звена, преимущественно автооператора, обслуживающего по меньшей мере два объекта, содержащем корпус, взаимодействующий с перемещаемым звеном, двигатель, связанный с перемещаемым звеном, фиксаторы крайнего положения перемещаемого звена и упругие элементы, в виде пружин растяжения, связанные одним концом с корпусом и установленные в противофазе, с длиной в свободном состоянии обеспечивающей возможность создания усилия в любом положении перемещаемого звена в
рабочей зоне, корпус выполнен в виде траверсы, установленной над объектами, пружина растяжения, образуя замкнутую систему, связаны между собой гибкой связью через полиспасты, перемещаемое звено выполнено в виде каретки и снабжено нормальнозамкнутым захватом, имеющим возможность свободного перемещения в разомкнутом положении относительно гибкой связи и замыкания ее в среднем положении каждой рабочей зоны,точность расположения которого обеспечивается дополнительным фиксатором положения, допускающего возможность свободного прохода каретки.. Наличие отличительных признаков: конструкция корпуса и подвижного звена, пружины, образующие с помощью гибкой связи и полиспастов замкнутую систему, захват гибкой связи, смонтированный на каретке, дополнительный фиксатор в среднем положении каждой рабочей зоны. Сопоставительный анализ заявляемого объекта и
00
Ю О
ю ы
известных выявил траверсу и движущуюся каретку с гибкой связью в загрузочно-раэ- грузочном механизме элеваторных стеллажей. Однако данный механизм не обеспечивает рекуперацию энергии и поэтому двигатель привода требует повышенной мощности из-за больших пусковых токов, чтд не требует предлагаемое устройство.
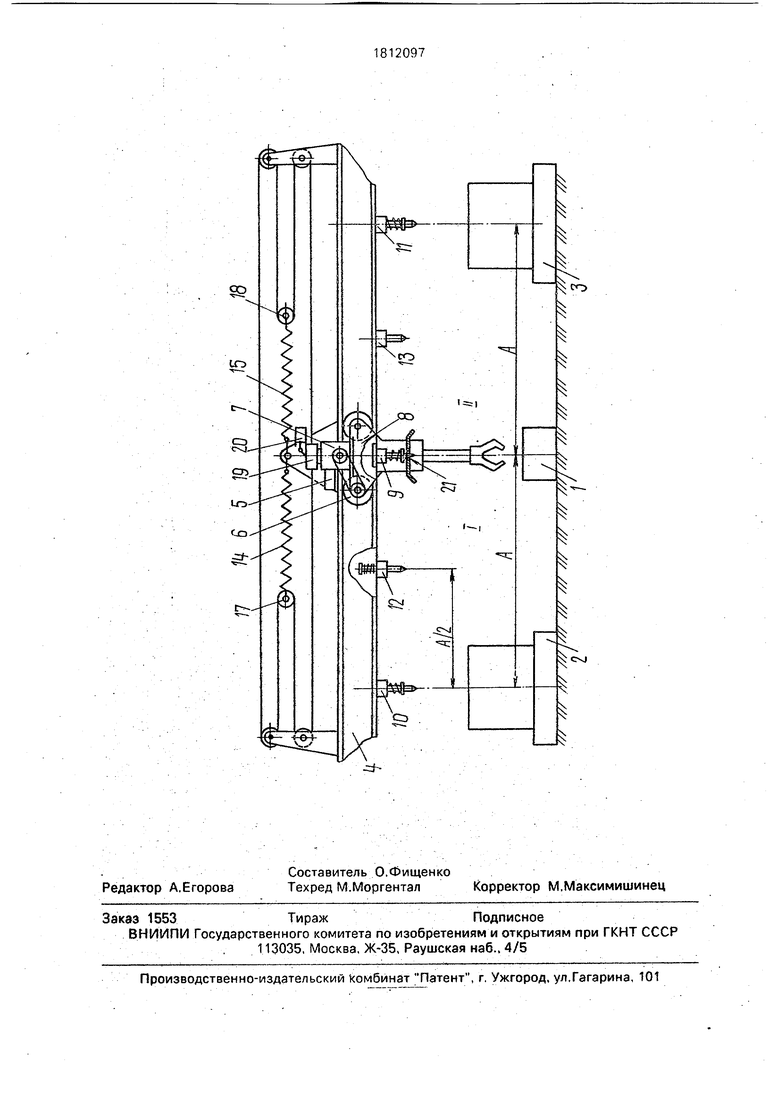
Изобретение поясняется чертежом, на котором приведен общий вид устройства.
Устройство содержит горизонтально установленную под загрузочным механизмом 1 и двумя обслуживаемыми, равноудалёнными от механизма 1 объектами 2,3 траверсу 4, на которой установлена с возможностью перемещения при помощи реверсивного двигателя 5 и катка 6 привода
7 каретка 8. На траверсе 4 установлены концевые подпружиненные фиксатора 9,10,11. соответственно расположённые над зоной загрузки механизма 1 и зонами разгрузки объектов 2 и 3, а также подпружиненные фиксаторы 12 и 13, расположенные соответственно в среднем положении между фиксаторами 9,10 и 9,1 1, с возможностью прохода при их выключенном положении, каретки 8. На траверсе 4 также смонтированы связанные одним концом пружины растяжения 14 и 15, образующие замкнутую с истему посредством гибкой связи 16 в виде полиспаста с двумя подвижными блоками 17,18, при этом длина каждого упругого элемента L0 в свободном состоянии должна удовлетворять неравенству: .
где А - амплитуда перемещения каретки в рабочей зоне,
К-кратность полиспаста.
На каретке 8 установлен нормальнозам- кнутый с гибкой связью 16, захват 19, в нормальном состоянии, размыкаемый при помощи электромагнита 20, при этом все фиксаторы взаимодействуют с осевым.отверстием 21 каретки 8.
Устройство работает следующим образом:
При включенном электромагните 20 и разомкнутом захвате 19, перемещают каретку 8 в одну из зон, например зону 1, где включенный фиксатор 12 фиксирует каретку
8 по осевому отверстию 21. В этом положении электромагнит 20 отключают и захват 19 соединяет каретку 8 с уравновешенной пружинами 14 и 15 гибкой связью 16, после чего освобождают от фиксатора 12 каретку 8. Каретку 8 перемещают в одно из крайних положений, где она удерживается одним из фиксаторов, например 10. По команде от
устройства управления (не показано) фиксатор 10 освобождает каретку 8 и она под действием пружины 15 перемещается в направлении противоположного фиксатора 9,
Одновременно с началом движения включается двигатель 5, компенсирующий потери энергии в элементах устройства. К моменту захвата фиксатором 9 каретки 8, его скорость замедляется до нуля, при этом двигатель
0 5 находится в отключенном.состоянии, Замедление скорости каретки 8 до нуля при подходе к фиксаторам 9 и 10 (или 9 и 11 в зоне 11) осуществляется настройкой двигателя 5 и обеспечивается симметричной сум5 мерной характеристикой жесткости пружин 14,15, усилия которых на каретку 8 находятся в противофазе.
Переналадка на работу каретки 8 в зоне 11 осуществляется в выше указанной после0 довательности, при этом используются фиксаторы .9,11,13.
Устройство позволяет простым одним средством компенсировать потери энергии в элементах устройства независимо от рас5 положения зоны работы каретки, а также обслуживать объекты, удаленные по отношению к прототипу, на большие расстояния, без увеличения массы привода. Формула изобретения
0 Транспортирующее устройство, содержащее направляющую, установленное на ней перемещаемое в, рабочей зоне звено с приводом его перемещения и рабочим органом, фиксаторы крайних положений пере5 мещаемото звена и упругие элементы в виде пружин растяжения, одни концы которых закреплены на перемещаемом звене с противоположных его сторон, отличающее- с я тем, что, с целью расширения технологи0 ческих возможностей, за счет обеспечения обслуживания перемещаемым звеном по меньшей мере двух рабочих зон, оно снабжено замкнутой гибкой связью, выполненной в виде полиспаста с неподвижными блоками,
5 сёязанными с направляющей, и подвижными блоками, и дополнительными фиксаторами,- а перемещаемое звено снабжено захватом, nptfl этом направляющая выполнена в виде траверсы, размещенной по меньшей мере над двумя.
0 рабочими зонами, перемещаемое звено выполнено в виде каретки, установленной с возможностью перемещения относительно гибкой связи и фиксации с последней посредством захвата в среднем положении каждой
5 рабочей зоны, причем дополнительные фиксаторы закреплены на траверсе также в среднем положении каждой рабочей зоны с возможностью взаимодействия с кареткой, а свободные концы пружин закреплены на соответствую щих подвижных блоках полиспаста.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1984 |
|
SU1191256A1 |
| Гибкий производственный модуль для резки заготовок из прутков круглого и квадратного проката | 1986 |
|
SU1431915A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Кабельно-троллейный токоподвод транспортных подвижных средств | 1989 |
|
SU1758746A1 |
| Строительный подъемник | 1971 |
|
SU450763A1 |
| Устройство для поштучной выдачи деталей | 1983 |
|
SU1143573A1 |
| АВТООПЕРАТОРООГСОЮсНАЯ I/i?vr!i!;i-,rcv7v:-::-U^Q;• !,М i .,:. :Ui* •. i.iUJi. -i.. iirii!!- r ,11 r- --'.' ;••^ - • -;' ;„' Д brJb.iii':*.^' : i-t <H . i | 1971 |
|
SU301255A1 |
| Станок для деформирующего протягивания | 1985 |
|
SU1346410A1 |
| Автоматическая линия для гальванической обработки изделий | 1980 |
|
SU927678A1 |
| Гибкий производственный модуль | 1986 |
|
SU1342668A1 |
Использование: машиностроение, в частности устройства для механизации и автоматизации производственных процессов. Сущность изобретения: в устройстве реализуется возможность перемещения каретки из одной рабочей зоны в другую. Для этого захват размыкают и перемещают каретку в середину одной из рабочих зон, где она фиксируется фиксатором. Электромагнит отключают, и захват соединяет каретку с гибкой связью. Затем каретку перемещают в одно из крайних положений, сжимая пружину и фиксируют фиксатором. При отключении фиксатора каретка перемещается под действием пружины в другое крайнее положение, где фиксируется другим фиксатором. 1 ил.
| Привод перемещения звена преимущественно промышленного робота | 1984 |
|
SU1511107A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | |||
