Л rf 5
Изобретение относится к промьпнлен- ному транспорту, а именно к гравитационным конвейерам.
Целью изобретения является автома- тизация запуска постановки конвейера .
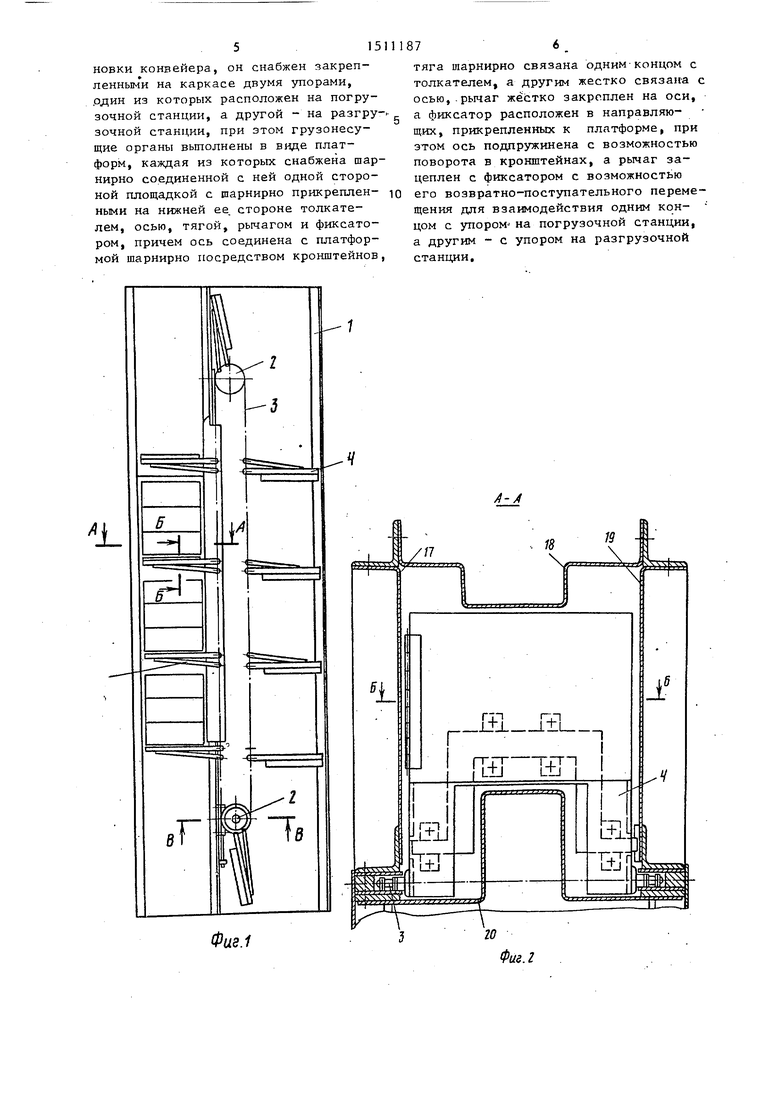
На изображен конвейер, общий вид; на фиг,2 - разрез А-А на фиг,1; на фиг.З - разрез Б-Б на фиг,1; на фиг,4 - разрез Д-Д на фиг,3; на фиг,5 - разрез В-В на фиг.Ь на фиг,6 - вид Г на фиг,5,
На каркасе 1 установлены звездочки 2, огибаемые двумя бесконечно замкнутыми тяговыми цепями 3 с закрепленными на них грузонесущими органами в виде платформ 4, Каждая платформа 4 снабжена шарнирно закрепленной одной своей стороной площадкой 5, на нижней стороне которой шарнирно прикреплен толкатель 6, Платформа 4 имеет также ось 7, установленную с возможностью поворота в кронштейнах 8 и связанную с толкателем 6 тягой 9, один конец которой связан с толкателем 6 щарнирно, а другой связан с осью 7 жестко. На нижней стороне платформы 4 прикреплены направляющие 10 с фиксатором 11, имеющим возможность возвратно-поступательного перемещения. Ось 7 подпружинена в радиальном направлении посредством жестко закрепленного на ней рычага 12 и пружины 13, связанной с регулировочным винтом 14,
На оси 7 жестко закреплен рычаг 15 :зацепленный с фиксатором 11,
На погрузочной станции (не показана) к каркасу 1 прикреплен упор 16, а на разгрузочной станции на противоположной стенке шахты каркаса 1 прикреплен второй упор (не показан) для взаимодействия со вторым концом фиксатора 11,
В шахте каркаса имеются ограничители 17-20 для предотвращения соскальзывания груза,
С целью ограничения скорости верти-50 кального перемещения груза конвейер снабжен подтормаживающим ус тройствр, работающим от центробежных сил. Это устройство содержит тормозной барабан 24, одно време но являющийся и 55 крышкой подшипника, смонтированный на валу 22 звездочки 2, Кроме того, на валу 22 закреплен диск 23, несущий тормозные колодки 24, стягивающиеся
5
0
5
0
5
0
5
0 5
пружинами 25, усилие которых регулируется винтами 26,
Постоянное горизонтальное положение грузонесущих платформ обеспечивается подкосами.
После установки груза на площадку 5 под усилием массы груза площадка 5 ложится на платформу 4 и через толкатель 6, тягу 9 поворачивает ось 7 против часовой стрелки, растягивая через рычаг 12 пружину 13, Одновременно рычаг 51 перемещает фиксатор 11 влево, выводя его из зацепления с упором 16, при этом второй конец фиксатора 11 выдвигается влево за габариты платформы 4, Расфиксированная на данной высоте пла тформа 4 под действием массы груза начинает перемещаться вниз вместе с тягов.ыми цепями 3, Одновременно движутся все платформы 4 до тех пор, пока загруженная платформа 4 не окажется на разгрузочной стан. ции. Фиксатор 11 этой платформы 4, выдвинутый влево, соприкоснется с упором, установленным слева (не показан) и движение конвейера прекращается.
При снятии груза пружина 13 своим уЪилием поворачивает за рычаг 12 ось 7 по часовой стрелке, тем самым перемещает посредством рычага 15 фиксатор 11 вправо, выдвигая его за пределы платформы 4, и через тягу 9 толкатель 6 поднимает площадку. 5, Далее цикл повторяется. Скорость перемещения платформы 4 регулируется путем регулирования усилия пружин 25,
При незначительной скорости движения в пределах допустимой скорости тормозные колодки 24 стянуты и не препятствуют движению. При возрастании скорости центробежные силы раздвигают тормозные колодки 24, преодолев усилие пружин 25, тормозные колодки 24 входят в соприкосновение с тормозным барабаном 2, н происходит притормаживание.
Формула изобретения
Гравитационный конвейер для штучных грузов, включающий каркас, две разн.ещенные в нем бесконечно замкнутые тяговые цепи с закрепленными на них грузонесущими органами и погру - зочнзпо и разгрузочную станции, отличающийся тем, что, с целью автоматизации запуска и оста/-/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1664684A1 |
| ТОРМОЗ ДЛЯ НАКЛОННОГО ЛЕНТОЧНОГО КОНВЕЙЕРА | 2008 |
|
RU2402477C2 |
| Устройство для загрузки транспортных средств | 1990 |
|
SU1782896A1 |
| ТОРМОЗ ДЛЯ НАКЛОННОГО ЛЕНТОЧНОГО КОНВЕЙЕРА | 2007 |
|
RU2350542C1 |
| Устройство для перегрузки штучных грузов | 1982 |
|
SU1062154A1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Устройство для перемещения груза | 1981 |
|
SU1020318A2 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Транспортная система | 1982 |
|
SU1167115A1 |

Изобретение относится к пром. транспорту и позволяет автоматизировать запуск и остановку конвейера. На каркасе установлены две бесконечно замкнутые тяговые цепи с закрепленными на них грузонесущими органами в виде платформ (П). На каркасе на погрузочной и разгрузочной станциях закреплены упоры (У). Каждая П снабжена шарнирно закрепленной одной стороной площадкой 5 с шарнирно закрепленным на нижней ее стороне толкателем (Т)6, осью 7 на кронштейнах 8, тягой 9, шарнирно связанной одним концом с Т6, а другим - жестко связанной с осью 7, рычагом 15, жестко закрепленным на оси 7, и фиксатором 11 в направляющих, прикрепленных к П. Ось 7 подпружинена с возможностью поворота в кронштейнах 8, а рычаг 15 зацеплен с фиксатором 11 с возможностью его возвратно-поступательного перемещения для взаимодействия одним концом с У 16 на погрузочной станции, а другим - с У на разгрузочной станции. При установке груза на площадке 5 она ложится на П4 и через Т6 поворачивает ось 7. При этом рычаг 15 перемещает фиксатор 11 влево, выводя его из зацепления с У16 и выдвигая второй конец фиксатора 11. Конвейер приводится в движение до момента соприкосновения выдвинутого второго конца фиксатора 11 со вторым У на разгрузочной станции. 6 ил.
Фие.1
20
Фиг. 2
Фиг.Ч
Ik
22
Фа. 5
ВиЗГ
25
| Полочный элеватор | 1982 |
|
SU1094814A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Гравитационный роликовый конвейер | 1976 |
|
SU655607A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
