21
L
сл
оо to to
со
ги
N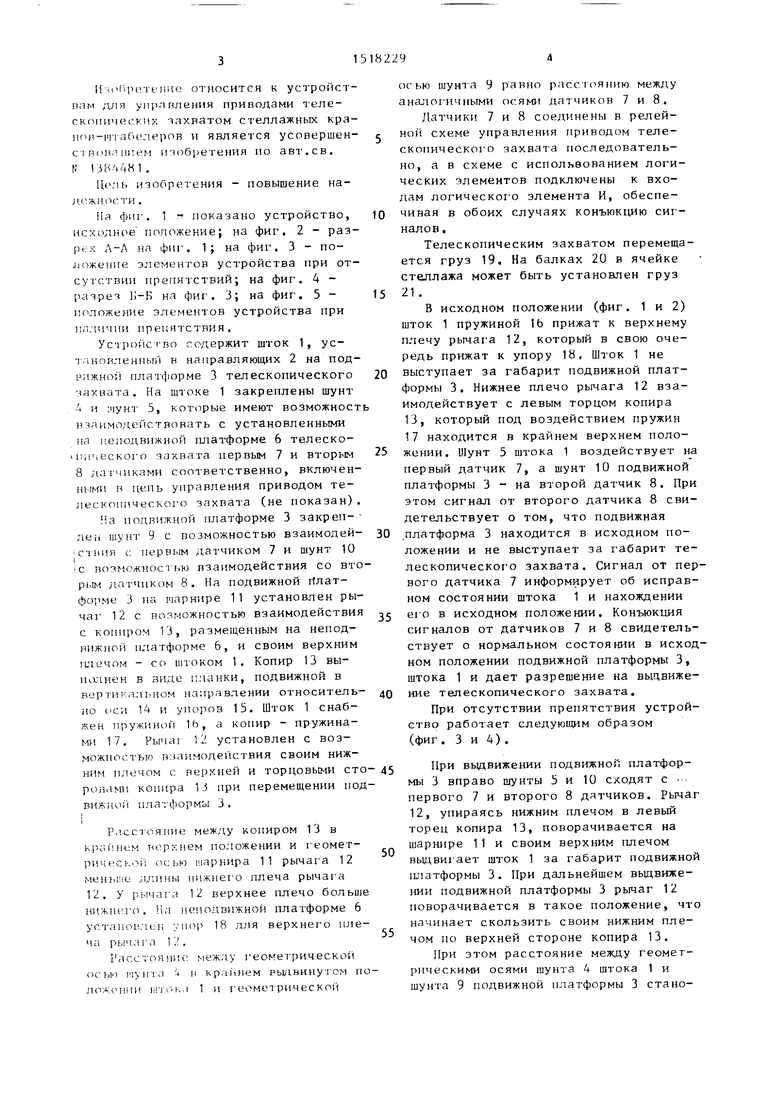
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1990 |
|
SU1733346A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1384481A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1594079A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1984 |
|
SU1204507A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1306852A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1062138A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1331747A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения - повышение надежности. В исходном положении шунт 5 штока 1 воздействует на первый датчик 7, а шунт 10 подвижной платформы 3 - на второй датчик 8, сигнал от которого свидетельствует о том, что подвижная платформа 3 находится в исходном положении и не выступает за габарит телескопического захвата. Сигнал от датчика 7 информирует об исправном состоянии штока 1 и нахождении его в исходном положении. Конъюнкция сигналов от датчиков 7 и 8 свидетельствует о нормальном состоянии устройства. В отклоненном состоянии платформы 3 шунты 4 и 9 одновременно взаимодействуют соответственно с датчиком 8 и 7 при пустой ячейке, а при занятой ячейке этого не происходит. 3 ил.
Фие.
Ил г ре -1ч:пие относится к ycrpos icT- пам для упрлпления приводами телескопических захватом стеллажных кра- иоп-рп абе.ч.еров и является усовершен- с 1 ni.ui. пием ичобретеиия по авт. св. N 13H. i481.
Цель изобретения - повышение на- л.кжиости .
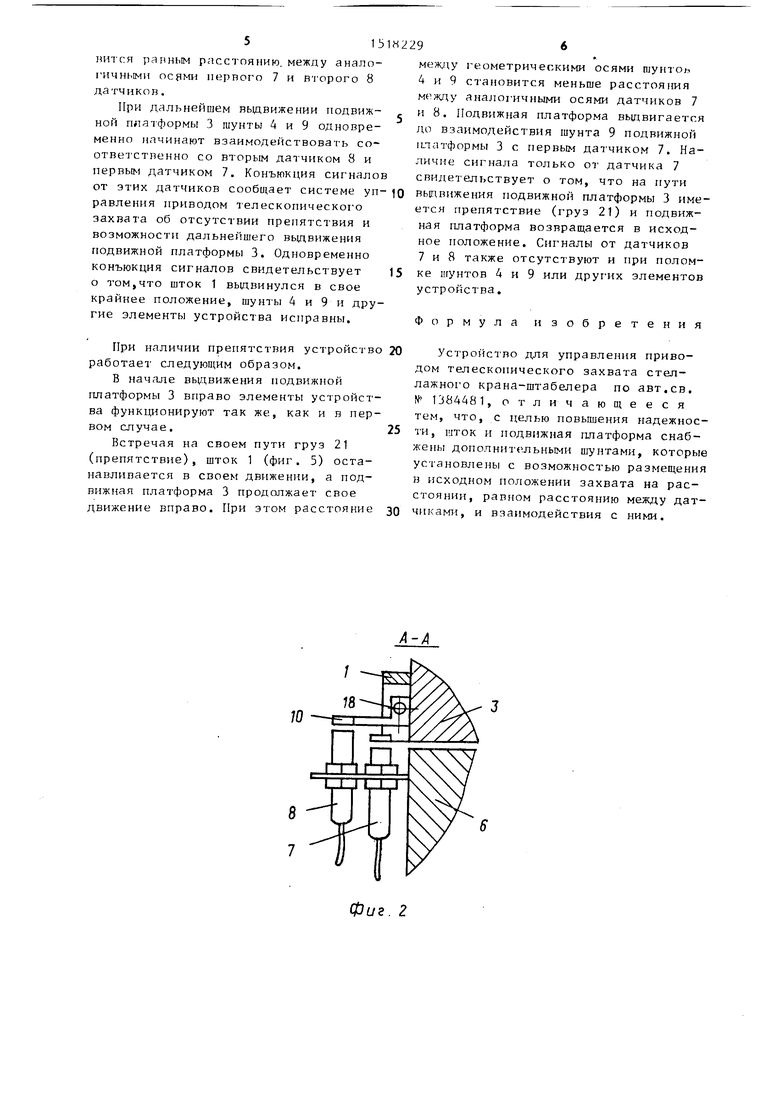
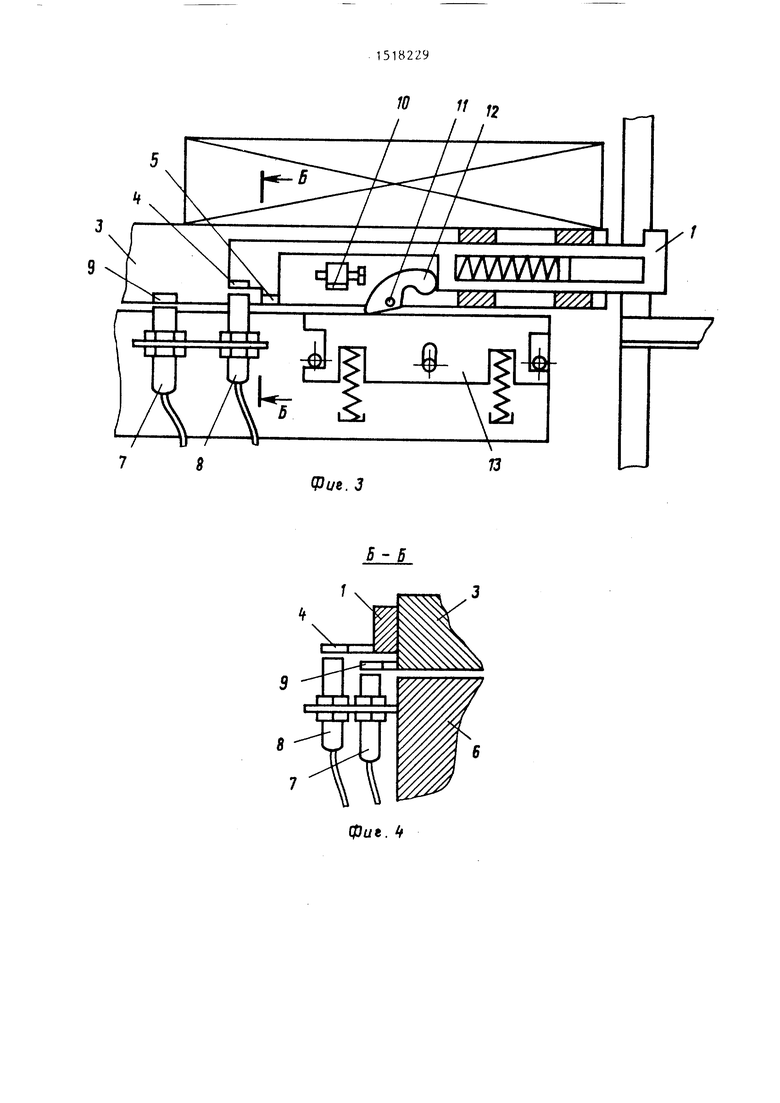
Яа фиг. 1 г- показано устройство, исходное положение; на фиг, 2 - раз- рех , на фиг. 1; на фиг, 3 - положение элементов устройства при отсутствии препятствий; на фиг . 4 разрез ;-Б на фиг , 3; на фиг. 5 - положение элементов устройства при на.чичии препятствия ,
yc ipofic i RO содержит шток 1, ус- т. 1ноиленнь й в на1фавляюиц1х 2 на под- 1 ;шной платформе 3 телескопического захвата. На штоке 1 закреплены шунт А и гчунт 5, которые имеют возможност взаимодействовать с установленными ип неподвижной платформе 6 телеско- Нического захвата первым 7 и вторым 8 дагчиками соответственно, включенными в цепь управления приводом телескопического захвата (не показан)
На подвижной платформе 3 закреп- утп шунт 9 с возможностью взаимодей- стиип с; первым датчиком 7 и шунт 10 с возь1ожнос1 ю взаимодействия со вторым датчиком 8. На подвижной гГлат- форме 3 на шарнире 11 установлен рычаг 12 с возможностью взаимодействия с копиром 13, размещенным на неподвижной платформе 6, и своим верхним плечом - со штоком 1, Копир 13 вы- паинен в виде планки, подвижной в вертикалiMioM направлении относитель- но оси 14 и упоров 15. Шток 1 снабжен пружиной 1Ь, а копир - пружинами 17. Рычаг 12 установлен с возможностью взаимодействия своим нижним плечом с верхней и торцовыми ст ронами копира 13 при перемещении под вижноГ) платформы 3 .
Расстояние между копиром 13 в краГ .нем верхнем положении и геомет- рическо -; осью шарнира 11 рычага 12 vieH},ine длины нижнего ллеча рычаг а 12. У рычага 12 верхнее плечо больи е нижнегс. На неподвижной платформе 6 установлен упор 18 для верхнего плеча рычага 12.
Расстояние между геометрической осью I lyii i a - I) крайнем выдвинутом по- ложонии (.Ka 1 и г еометрической
О 5
0
5
осью шунта 9 равно расстоянию между аналог ичными осями датчиков 7 и 8.
Датчики 7 и 8 соединены в релейной схеме управления приводом телескопического захвата последовательно, а в схеме с испольвованием логических элементов подключены к входам логическог о элемента И, обеспечивая в обоих случаях кoнъюки ю сигналов.
Телескопическим захватом перемещается груз 19, На балках 20 в ячейке стеллажа может быть установлен груз 21.
В исходном положении (фиг, 1 и 2) шток 1 пружиной 16 прижат к верхнему плечу рычага 12, который в свою очередь прижат к упору 18, Шток 1 не выступает за габарит подвижной платформы 3, Нижнее плечо рычага 12 взаимодействует с левым торцом копира 13, который под воздействием пружин 17 находится в крайнем верхнем положении. Шунт 5 штока 1 воздействует на первый датчик 7, а шунт Ю подвижной платформы 3 - на второй датчик 8, При этом сигнал от второго датчика 8 свидетельствует о том, что подвижная ,платформа 3 находится в исходном положении и не выступает за габарит телескопического захвата. Сигнал от первого датчика 7 информирует об исправном состоянии штока 1 и нахождении его в исходном положении. Конъюкция сигналов от датчиков 7 и 8 свидетельствует о нормальном состоянии в исходном положении подвижной платформы 3, штока 1 и дает разрешение на выдвижение телескопического захвата.
При отсутствии препятствия устройство работает следуюшдм образом (фиг. 3 и 4) ,
При вьщвижении подвижной платформы 3 вправо шунты 5 и 10 сходят с первого 7 и второго 8 датчиков. Рычаг 12, упираясь нижним плечом в левый торец копира 13, поворачивается на шарнире 11 и своим верхним плечом выдвигает шток 1 за габарит подвижной Ш1атформы 3, При дальнейшем выдвижении подвижной платформы 3 рычаг 12 поворачивается в такое положение, что начинает скользить своим нижним плечом по верхней стороне копира 13.
При этом расстояние между геометрическими осями шунта 4 штока 1 и шунта 9 подвижной платформы 3 станскится ранным расстоянию, между аналогичными осрми первого 7 и вч орого 8 датчиков.
При дальнейшем выдвижении подвижной платформы 3 шунты 4 и 9 одновременно начинают взаимодействовать соответственно со вторым датчиком 8 и первым датчиком 7. Конъюкция сигналов
от этих датчиков сообщает системе уп- Q выдвижения подвижной платформы 3 имеравления приводом телескопическог о захвата об отсутствии препятствия и возможности дальнейшего выдвижения подвижной платформы 3. Одновременно КОНЪЮКЦИЯ сигналов свидетельствует о том,что шток 1 вьивинулся в свое крайнее положение, шунты 4 и 9 и другие элементы устройства исправны.
При наличии препятствия устройство работает следующим образом.
В начале вь вижения подвижной гшатформы 3 вправо элементы устройства функционируют так же, как и Б первом случае.
Встречая на своем пути груз 21 (препятствие), шток 1 (фиг. 5) останавливается в своем движении, а подвижная платформа 3 продолжает свое движение вправо. При этом расстояние
между геометрическими осями шунтоь 4 и 9 становится меньше расстояния между аналогичными осями датчиков 7 и 8. Подвижная платформа выдвигается до взаимодействия шунта 9 подвижной гшатформы 3 с первым датчиком 7. Наличие сигнала только от датчика 7 свидетельствует о том, что на пути
ется препятствие (груз 21) и подвижная платформа возвращается в исходное положение. Сигналы от датчиков 7 и 8 также отсутствуют и при поломке цгунтов 4 и 9 или других элементов устройства.
Формула изобретения
Устройство для управления приводом телескопического захвата стеллажного крана-штабелера по авт.св. № 1384481, отличающееся тем, что, с целью повышения надежности, шток и подвижная платформа снабжены дополнительными шунтами, которые установлены с возможностью размещения }з исходном положении захвата на расстоянии, равном расстоянию между датчиками, и взаимодействия с ними.
Фиг. 2
8
(Рие. 3
Ю 11 f2
фие,
m
tf)
u
:a
8
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1384481A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
