IS 16 8 7 г ю г
//// .:/.../ ./
00 00 4 4
сэо
Изобретение относится к устройствам для управления приводами телескопических захватов стеллажных кранов-штабелеров.
Цель изобретения - повышение надежности.
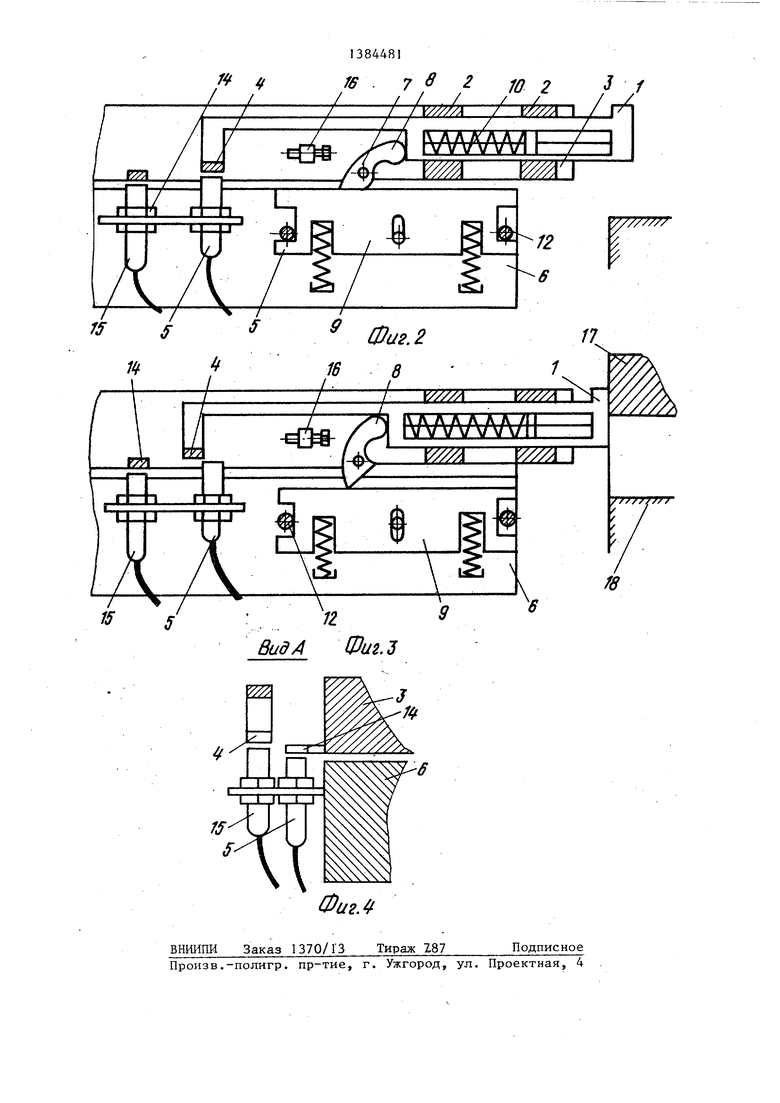
На фиг.1 схематически представлено предлагаемое устройство, исходное положение; на фиг.2 - положение элементов устройства при отсутствии препятствий; на фиг.З - то же, при наличии препятствия; на фиг.4 - вид А на фиг.1.
Устройство содержит фиг.Г-4) шток 1, установленный в направляющих
2на подвижной платформе 3 телескопического захвата. На штоке 1 закреплен шунт 4, который имеет возможност при выдвижении подвижной платформы
3взаимодействовать с датчиком 5, установленным на неподвижной платформе 6 телескопического захвата и включенным в цепь управления приводом телескопического захвата (не по- казан. На подвижной платформе 3 на шарнире 7 установлен рычаг 8 с возможностью взаимодействия с копиром
9,размещенным на неподвижной платформе 6, и своим плечом - со што- ком 1 Последний снабжен пружиной
10,закрепленной на подвижной платформе 3. Копир 9 выполнен в виде планки, подвижной в вертикальном направлении относительно оси 11 и упо- ров 12. Копир 9 снабжен пружинами 13 которые прижимают его к упорам 12. Рьиаг 8 установлен с возможностью взаимодействия нижним плечом с верхней и торцовыми сторонами копира 9
при перемещении подвижной платфор- мы 3.,
Расстояние между копиром 9 в крайнем верхнем положении и геометрической осью шарнира 7 рычага 8 меньше длины нижнего плеча рычага 8, У рычага 8 верхнее плечо больше нижнего. На подвижной платформе 3 установлены дополнительный шунт 14 с возможность взаимодействия с дополнительным датчиком 15, укрепленным на неподвижной платформе 6 и включенным в цепь управления приводом- телескопического захвата, и регулируемый упор 16 для верхнего плеча рычага 8. Расс тояние между геометрической осью шунта 4 в крайнем выдвинутом положении штока I и геометрической осью дополнительног шунта 14 равно расстоянию между ана
0
5
0
5
0
t
0
5
0
5
; огичнь(ми осями датчиков 5 и 15. Датчики 5 и 15 соединены в релейно) схеме управления приводом телескопического захвата последовательно, а в схеме с использованием логических элементов они подключены к входам логического элемента И, обеспечивая в обоих случаях конъюкцию сигналов. Телескопическим захватом перемещается груз 17, установленный, например, на балке 18 стеллажа.
Шунты 4 и 14 могут быть выполнены разной длины (фиг.4), а датчики 5 и 15 установлены соответственно на различном расстоянии от неподвижной платформы 6. В исходном положении (фиг.1) шток 1 пружиной IО прижат к верхнему плечу рычага 8, который в свою очередь прижат к упору 16. Шток 1 не выступает за габариты подвижной платформы 3. Нижнее плечо рычага 8 взаимодействует с левым торцом копира 9, который под воздействием пружин 13 находится в крайнем верхнем положении. Шунты 4 и 14 не воздействуют на датчики 5 и 15.
При отсутствии препятствия устройство работает следуюш;им образом.
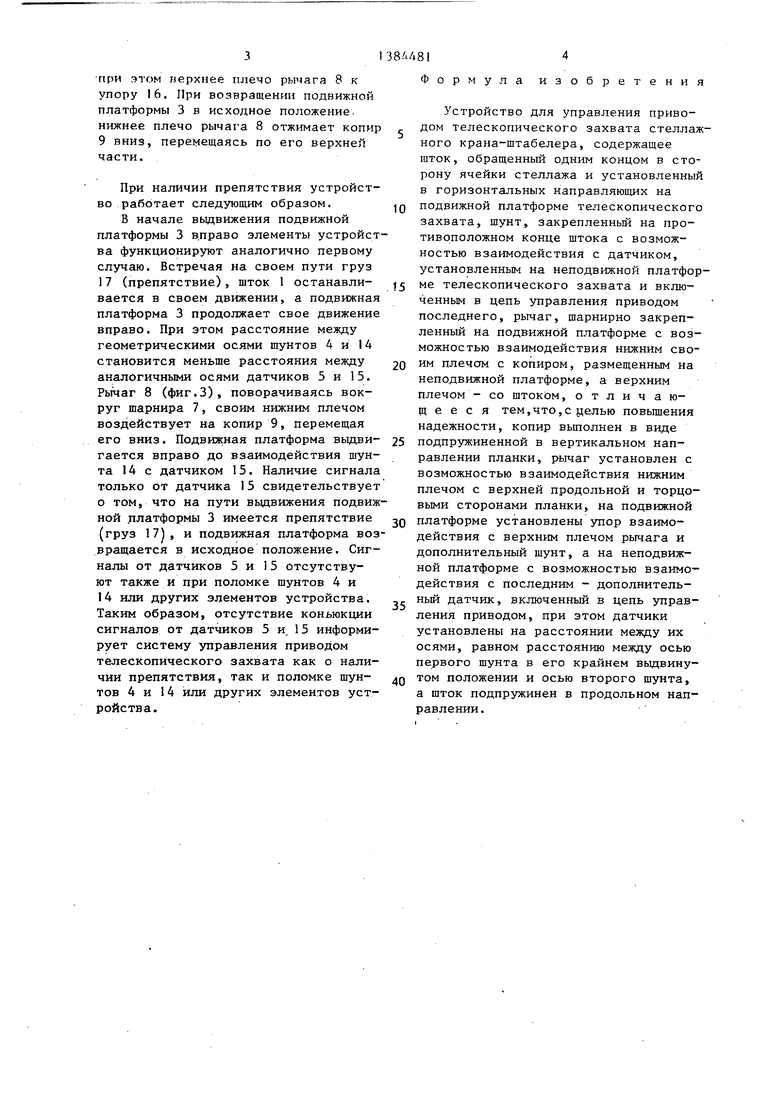
При выдвижении подвижной платформы 3 вправо рычаг 8, упираясь нижним плечом в левьш торец копира .9, поворачивается на шарнире 7 и своим верхним плечом вьщвигает шток за габарит подвижной платформы 3. При дальнейшем выдвижении подвижной платформы 3 рычаг 8 поворачивается в такое положение, что начинает скользить своим нижним плечом по верхней . стороне копира 9. Расстояние между геометрическими осями шунтов 4 и 14 становится равным расстоянию между аналогичными осями датчиков 5 и 15. Шунты 4 и 14 (фиг.2) одновременно начинают взаимодействовать соответственно с датчиками 5 и 15, конъюкция. сигналов которых сообщает система управления приводом телескопического захвата об отсутствии препятствия и возможности дальнейшего выдвижения подвижной платформы 3. Одновременно коньюкция сигналов свидетельствует и о том, что шток 1 вьщ- винулся в свое крайнее правое положение, шунты 4 и 14 и другие элементы устройства исправны. При дальней- щем выдвижении рычаг 8 сходит с копира 9 и пружина 10 возвращает шток 1 в первоначальное положение, прижимая
при этом нерхнее плечо рычага 8 к упору 16. При возвращении подвижной платформы 3 в исходное положение, нижнее плечо рычага 8 отжимает копир 9 вниз, перемещаясь по его верхней части.
При наличии препятствия устройство работает следующим образом.
В начале выдвижения подвижной платформы 3 вправо элементы устройства функционируют аналогично первому случаю. Встречая на своем пути груз 17 (препятствие), шток 1 останавливается в своем движении, а подвижная платформа 3 продолжает свое движение вправо. При этом расстояние между геометрическими осями шунтов 4 и 14 становится меньше расстояния между аналогичными осями датчиков 5 и 15. Рьгчаг 8 (фиг.З), поворачиваясь вокруг шарнира 7, своим нижним плечом воздействует на копир 9, перемещая его вниз. Подвижная платформа вьщви- гается вправо до взаимодействия шунта 1 4 с датчиком 15. Наличие сигнала только от датчика I5 свидетельствует о том, что на пути вьщвижения подвижной платформы 3 имеется препятствие (груз 17 f и подвижная платформа возвращается в исходное положение. Сигналы от датчиков 5 и 15 отсутствуют также и при поломке шунтов 4 и 14 или других элементов устройства. Таким образом, отсутствие коньюкции сигналов от датчиков 5 и. 15 информирует систему управления приводом телескопического захвата как о наличии препятствия, так и поломке шунтов 4 и 14 или других элементов устройства.
Формула изобретения
Устройство для управления приво- дом телескопического захвата стеллажного крана-штабелера, содержащее шток, обращенный одним концом в сторону ячейки стеллажа и установленный в горизонтальных направляющих на
ПОДВИЖНОЙ платформе телескопического захвата, шунт, закрепленный на противоположном конце штока с возможностью взаимодействия с датчиком, установленным на неподвижной платформе телескопического захвата и включенным в цепь управления приводом последнего, рычаг, шарнирно закрепленный на подвижной платформе с возможностью взаимодействия нижним своим плечам с копиром, размещенным на неподвижной платформе, а верхним плечом - со штоком, о т л и ч а ю- щ е е с я тем,что,с целью поньш1ения надежности, копир вьтолнен в виде
подпрз иненной в вертикальном направлении планки, рычаг установлен с возможностью взаимодействия нижним плечом с верхней продольной и торцовыми сторонами планки, на подвижной
платформе установлены упор взаимодействия с верхним плечом рычага и дополнительный щунт, а на неподвижной платформе с возможностью взаимодействия с последним - дополнитель-
ный датчик, включенный в цепь управления приводом, при этом датчики установлены на расстоянии между их осями, равном расстоянию между осью первого шунта в его крайнем вьщвинутом положении и осью второго шунта, а шток подпружинен в продольном направлении.
1Z3
Вид А Фш.З
Г8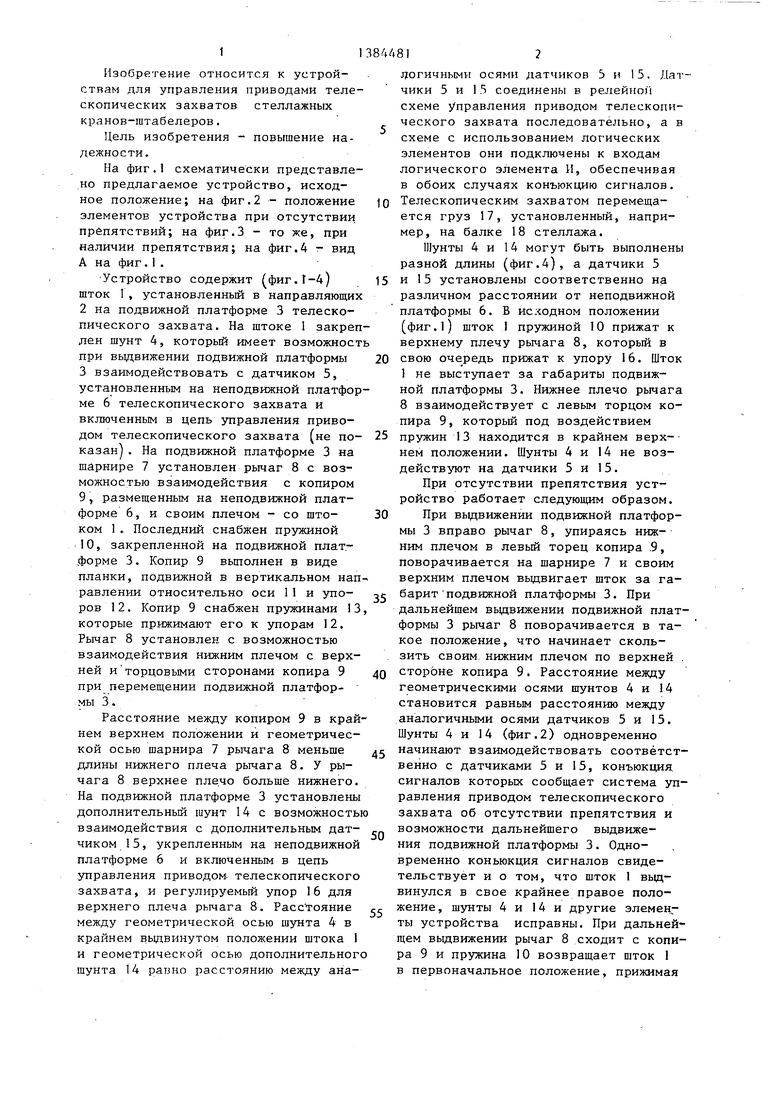
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1990 |
|
SU1733346A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1518229A2 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1594079A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1306852A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1984 |
|
SU1204507A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1062138A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1331747A1 |
Изобретение относится к подъемно-транспортному машиностроению. Целью изобретения является повьш1е- ниа надежности. Устройство содержит шток 1, установленный в направляющих 2 на подвижной платформе 3 телескопического захвата. На штоке 1 закреплен шунт 4, который имеет возможность при выдвижении подвижной платформы 3 взаимодействовать с датчиком 5, установленным на подвижной платформе 6 телескопического захвата и включенным в цепь управления приводом телескопического захвата. На подвижной платформе 3 на шарнире 7 установлен рычаг 8 с возможностью взаимодействия с копиром 9. Шток 1 снабжен пружиной 10, закрепленной на подвижной платформе 3. Копир 9 вьтолнен в виде планки и снабжен пружинами 13, которые прижимают его к упорам 12. На подвижной платформе 3 установлены дополнительный шунт 14 с возможностью взаимодействия с дополнительным датчиком 15, укрепленным на неподвижной платформе 6 и включенным в цепь управления приводом телескопического захвата, и регулируемый упор 16 для верхнего плеча, рычага 8.4 ил. с (Л
Фи2.
ВНШШИ Заказ 1370/13 Тираж Z87
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Подписное
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1984 |
|
SU1204507A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
