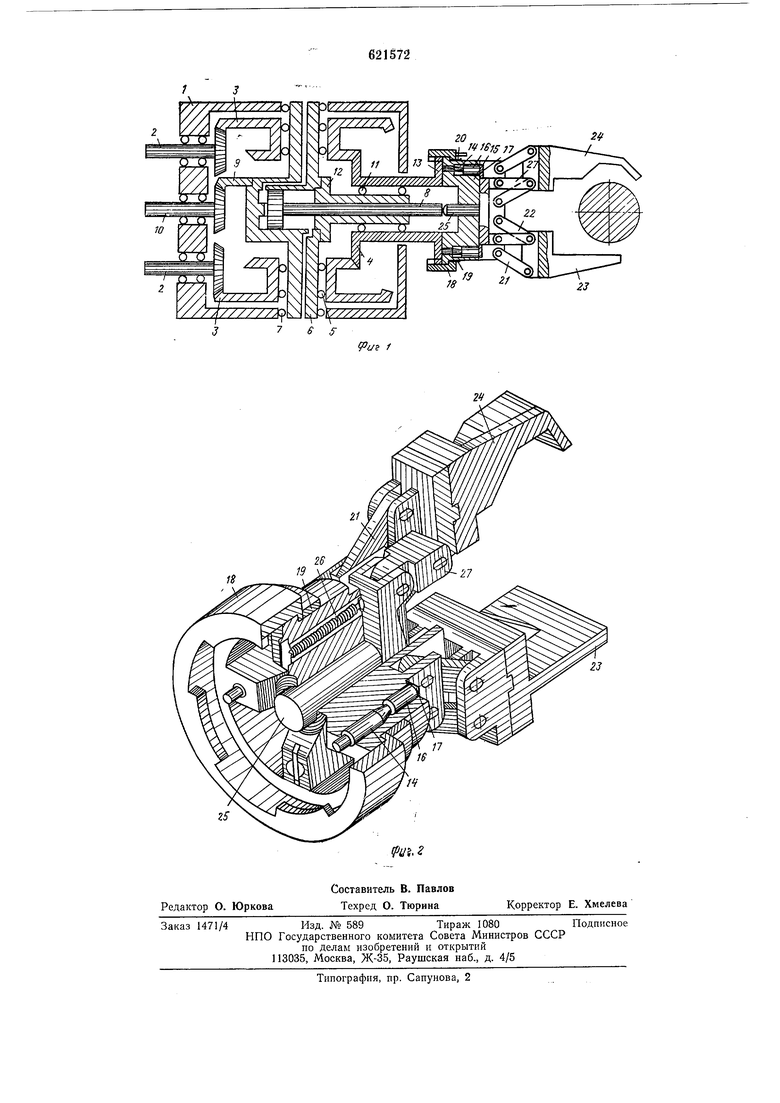
пружиной 17. На цилиндрической поверхности корпуса схвата установлена планшайба 18, имеющая возможность поворота относительно корпуса схвата 15 и в осевом положении закрепленная на корпусе Схвата кольцом 19. Планшайба 18 имеет буртик с радиальными пазами, в которые с зазором могут входить выступы фланца 13. На торце планшайбы имеется штифт 20, который служит для базирования схватов в таре. Корпус схвата 15 на передней своей части имеет пазы, в которых шарнир но закреплены серьги 21, 22 параллелограмма с закрепленными на них губками 23, 24 схвата. В центрально расположенном отверстии корпуса схвата установлен толкатель 25, шток которого воздействием пружин 26 прижат к шток-поршню 8, а шарнир но закрепленные на его передней части серьги 27 шарнирно связаны с губками 23 схвата. Работа кисти промышленного робота с автоматически сменяемым схватом происходит следующим образом. При подаче вращения на конические зубчатые колеса 2 с одинаковой скоростью и в одном направлении блоки конических зубчатых колес 3 вращаются в разные стороны, а тем самым выходное зубчатое колесо дифференциального механизма 4 поворачивается и через штыри 14 поворачивает корпус схвата 15 с установленными на нем губками 23 и 24. При подаче вращения на конические зубчатые колеса 2 с одинаковой скоростью, но в противоположном направлении конические зубчатые колеса 3 вращаются в одну сторону, и происходит качание кисти вместе с валом 6. «Одевание схвата происходит следующим образом. Кисть робота по программе, записанной в его памяти, подходит к таре со сменными схватами, при этом ось выходного зубчатого колеса дифференциального механизма 4 совмещается с осью необходимого схвата 15, а фланец 13 своими выступами попадает в пазы буртика планшайбы 18 и совмещается с канавкой планшайбы. Поеле этого по программе эаписанной S йаййти робота, происходит поворот выходного зубчатого колеса дифференциального механизма на угол, равный половине угла между выступами фланца 13, который при этом вместе с корпусом схвата (за счет штырей 14) занимают положение между впадинами планшайбы 18, что обеспечивается удержанием планшайбы 18 неподвижной относительно тары схватов штифтом 20. «Снимание схвата осуш,ествляется в обратном порядке. Зажим деталей происходит при подаче энергоносителя в поршневую полость цилиндра привода схвата. При этом шток 8 нажимает своим торцом на шток толкателя 25, который перемещением и благодаря шарнирному соединению губок 23 на серьгах 21 сжимает деталь. При разжиме энергоноситель, подаваемый в щтоковую полость привода схвата, перемещают штокпоршень 8 в левое крайнее положение, а пружины 26 возвращают толкатель 25 также в левое крайнее положение, схват разжимается и т. д. Формула изобретения Кисть промышленного робота, содержащая дифференциальный исполнительный механизм, привод, выполненный в виде силового цилиндра, и съемный схват, состоящий из корпуса, губок и рычажного механизма, отличающаяся тем, что, с целью повышения надежности и упрощения конструкции, выходное звено дифференциала снабжено фланцем с установочными штырями и радиальными выступами, схват-планшайбой с ответными этим выступам пазами, а на корпусе схвата выполнены отверстия под установочные штыри, в которых смонтированы подпружиненные пальцы, при этом планшайба снабжена элементом фиксации ее положения вне кисти, например в таре. Источники информации, принятые во внимание при экспертизе 1. Пособие по применению поомышлепных роботов.- Под ред. Коцухико-Нода. М., «Мир, 1965, с. 77, р. 5.1.

| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Схват промышленного робота | 1981 |
|
SU1014701A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Захватное устройство | 1985 |
|
SU1255430A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |