- Изобретение относится к обработке металлов давлением, а именно к роторным устройствам, и может быть использовано при изготовлении крепежных изделий, например гаек и болтов.
Цель изобретения - расширение технологических возможностей устройства.
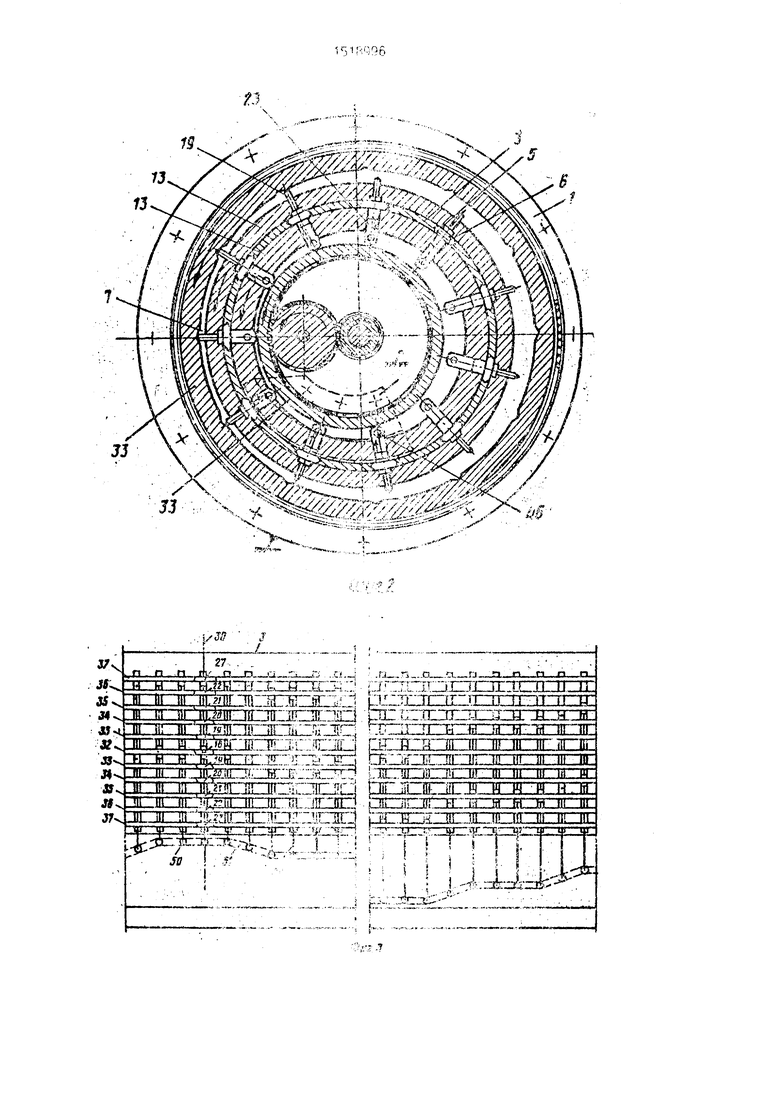
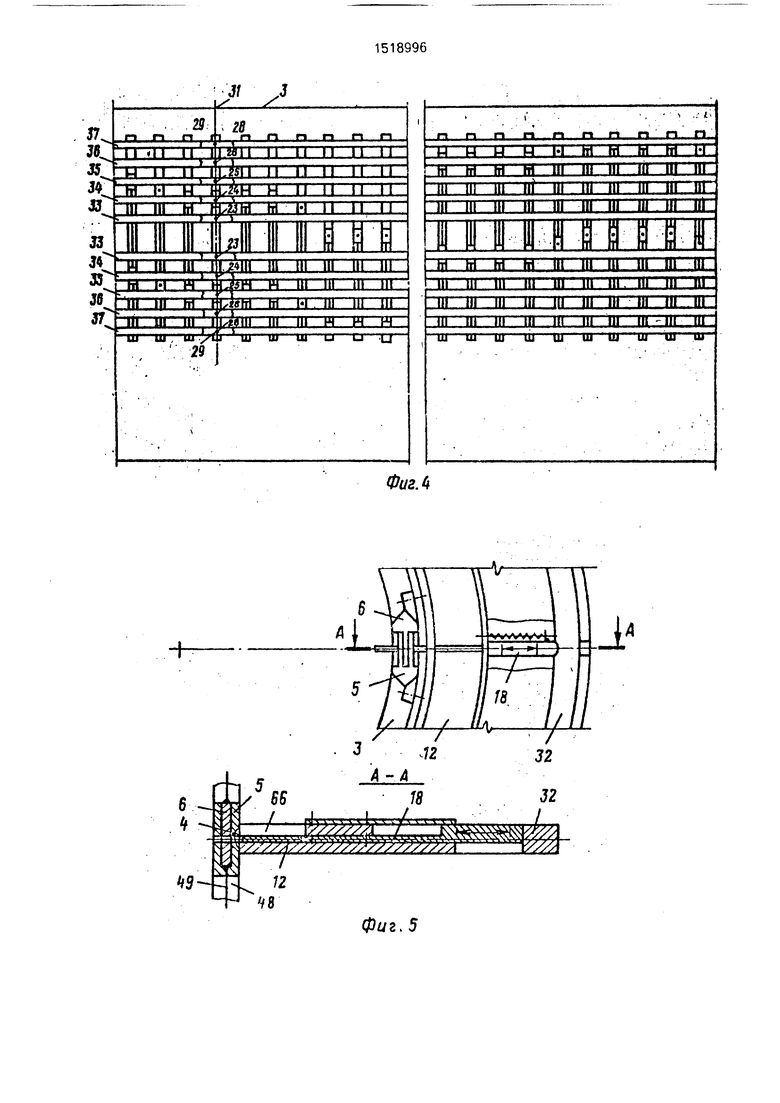
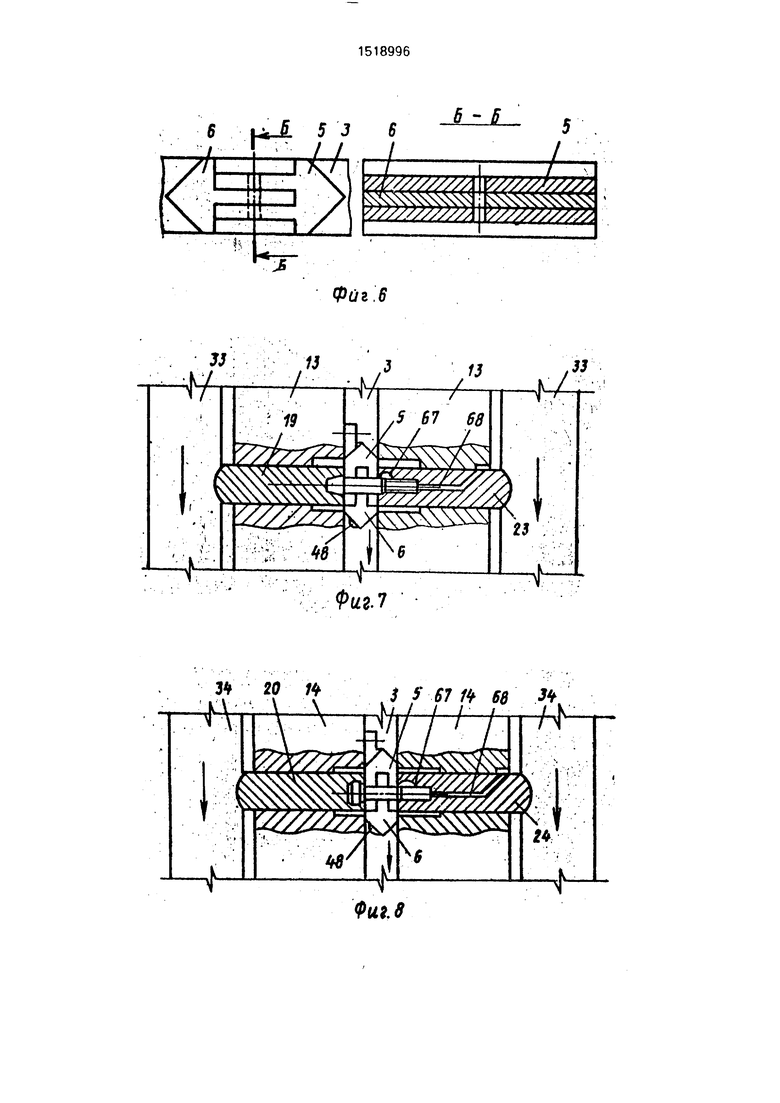
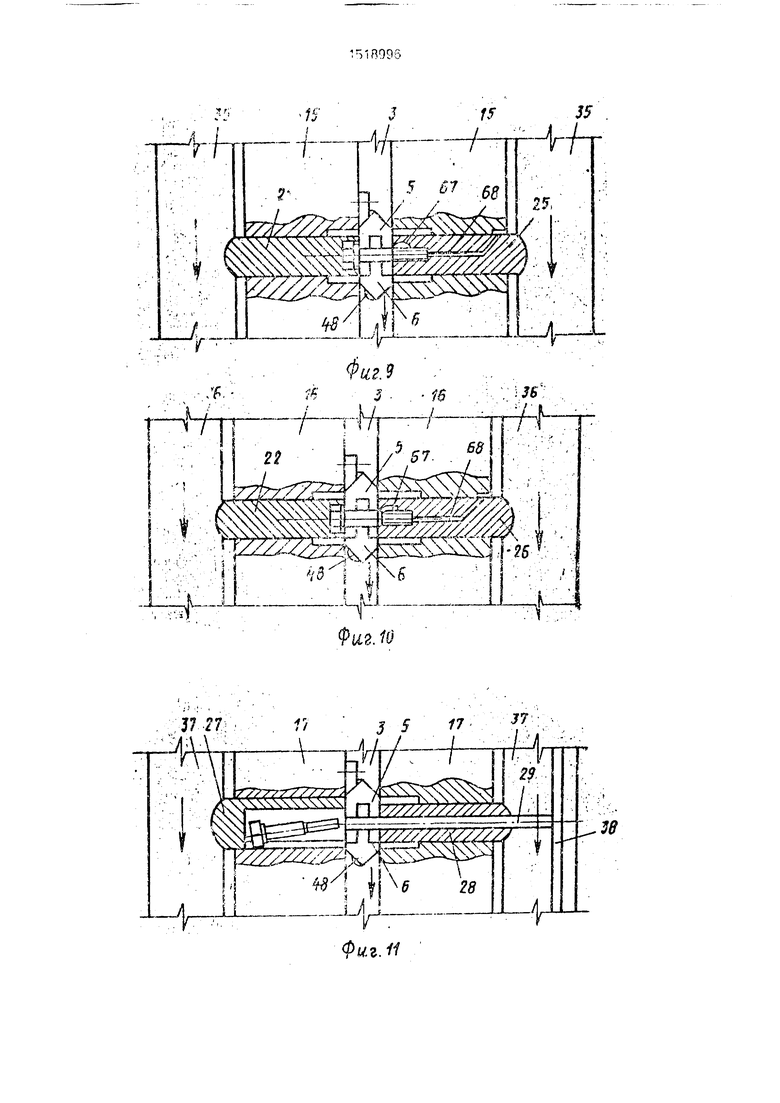
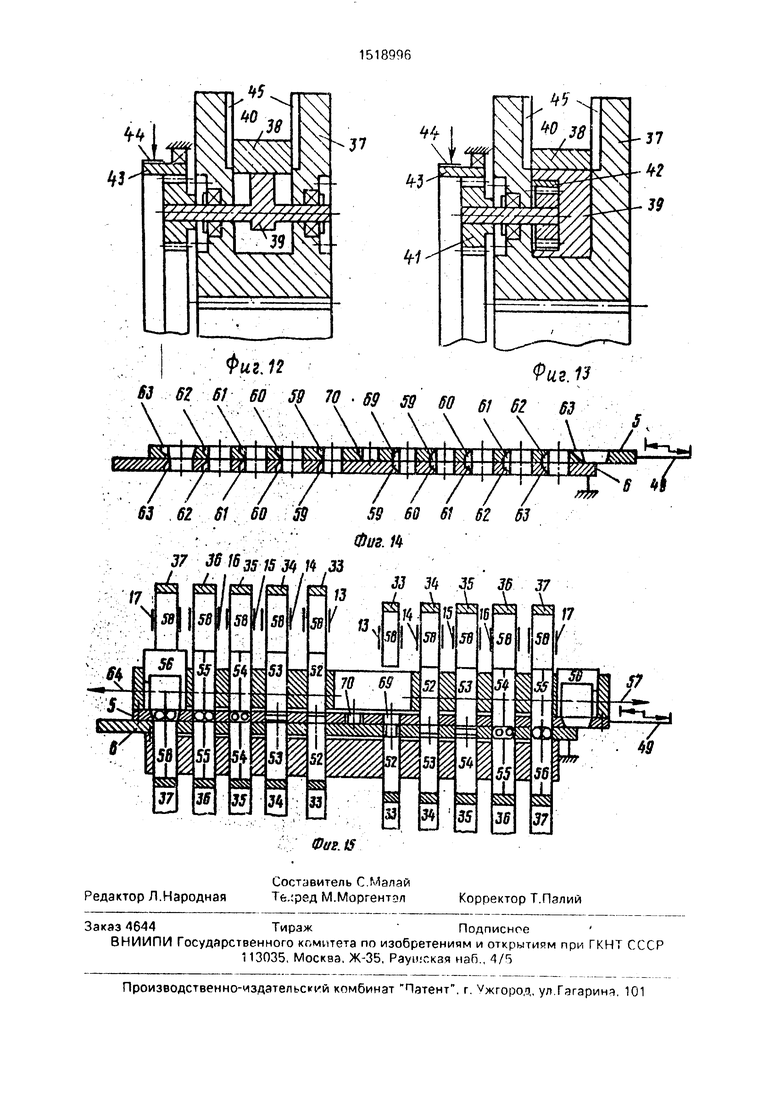
На фиг,1 показано устройство, общий вид; на фиг.2 - поперечное сечение радиального ротора по первому сектору технологической обработки на фиг,1: на фиг,3 - развертка устройства по внешней образующей на фиг,1; на фиг,-4 - развертка устройства по внутренней образующей на фиг.1; на фиг,5 - фрагмент плана и разрез механизма заталкивания заготовок в отверстия составной матрицы в секторе зчтзлкиоания заготовок на фиг, 1: на фиг.6 - терцовый вид и разрез составной матрицы транспортирования заготовок на фиг.1: на фиг,7 взаимодействие холодновысадочного инструмента с составной матрицей в первом секторе технологической обработки на «риг, 1: на фиг,8 - то же, во втором секторе технологической обработки на фиг, 1; на фиг.9 - то же, в третьем секторе технологической обработки на фиг.1: на фиг. 10 - то же, в четвертом секторе технологической обработки на фиг.1; на фиг, 11 - взаимодействие холодновысадочного инструмента с составной матрицей в секторе сьема готовых изделий на фиг. 1; на фиг, 12-13 - варианты выполнения ус тройства для регулировки хода выталкивателя матрицы в секторе сьема готовых изделий на фиг,1; на фиг.14 - вариант исполнения составной матрицы на фиг,6: на фиг, 15 - схема изготовления крепежных изделий в составной матрице на фиг, 14.
Ротационное роторно-1:омвейерное устройство для холодной штамповк Л спдер.жит
(Л
00 ю ю
о
смонтированный на станине 1 (см. фиг. 1-4) приводной от электродвигателя 2 радиальный ротор 3 с секторами 4 заталкивания заготовок в отверстия половин 5 и б составной матрицы, их технологической обработки 7-10 и сьема 11 готовых изделий. Ротор 3 имеет закрепленные с его внешней и внутренней образующей кольцевые держатели 12-17 соответственно для затялкивателей 18, пуансонов 19-22 и матрицы 23-26 для секторов 7-10 технологической обработки, для пуансон-опор 27 и матриц 28 с выталкивателями 29 в секторе сьема готовых изделий.
Заталкиватели 18. пуансоны 19-22 и пуансон-опора 27 образуют с внешней образующей радиального ротора 3 вертикальный ряд 30, а матрицы 23-26 и матрицы 28 с выталкивателями 29 с внутренней образующей последнего - вертикальный ряд 31 технологического инструмента в секторах технологической обработки и съема готовых изделий соответственно.
Вертикальные ряды 30 и 31 технологического инструмента обеспечены приводом в виде приводных колец 32-37 соответственно для секторов заталкивания, технологической обработки и съема готовых изделий. Вращение поиводных колец 32-37 пуансонов 19-22, 27 осуществляется зэсчет распора последних с приводными кольцами в соответствующих секторах. Выступы заталкивателей 18, пуансонов 19-22, 27 входят в этих секторах во впадины поикод- иых колец 32-37. Другие приводные кольца 33-37 матриц 23-26. 28 связаны с электродвигателем 2 посредством солнечней и промежуточной шестерен (на чертеже не показаны), закрепляемых на общем валу.
Привод выталкивателей 29 матри 28 (см. фиг. 12) сектора сьема готовых изделий содержит кольцо 38 и две пары эксцентриков 39, смонтированных в выборке 40 приводного кольца 37.
Привод выталкивателей 29 матриц 28 (см. фиг, 13) может быть выполнен в виде кольца 38 и кольца 39 с эксцентричным отверстием, смонтированных в вь борке 40 приводного кольца 37. При этом последнее снабжено зубчатым валиком 41, связывающим зубчатый венец 42 кольца 3G с зубчатым венцом 43, установленным в подшипниках станины и снабженным тормозным устройством 44. Кроме того, кольцо 38 связано с боковыми стенками выборки 40 приводного кольца 37 посредством муфт 45. обеспечивающих сцепление кольца 38 с приводным кольцом 37 при поперечном перемещении его относительно оси враидения последнего.
Возвратное дсижоние матриц 23-26 (см. фиг.1, 2) для секторов 7- 10 технологичеCKOi i обработки и матриц 28 с выталкивате- ..ми 29 съема РОГОВЫХ издепий осуществпяется посредством взаимодейст- рмя их ролика 46 с K ontipHyN i устройством 47.
0В направляющих 48 радиального ротора 3 установлены составные матрицы, со стоящие из половин 5, 6, взаимодействующие с технологическим инструментом вертикальных рядов 30. 31 ра5 диального ротора 3. Полови на 5 составной матрицы связана посредством тяги 49 и ролика 50 с копирным устройством 51 и допу екает возможность поперечного смещения продольной оси своего отверстия относи0 тельно продольной оси отверс ия половины 6 в период движения составной матрицы из сектора заталкивания 4 заготовок в последующие сектора 7-10.
В другом оарианте на половинах 5, 6
5 (см. 14 и 15) составной матрицы смонтированы с равным шагом, соответствующим тагу приводных колец 33-36, 37 устройства, м навстречу друг другу пуансоны 52-55 тех- но;1оги«еской обработки и пуансон с пуан0 сом-опорой 56 сьема готовых изделий, образующие вертикальные ряды 57 технологического инструме -:; операций прямого ьтпраалеимя , взаимодействующего с ползу5 нами 58 кольцевых держателей 13-16, 7 и отверстиями 59-62, 63 половин 5 и 6 сог.тав- ной м-этрмцы.
Креме того, ча половинах S и 6 смгнп :- ровйны пуэнсоны 52-55 технологической
0 обработки и пуансон с пуансон опс-рой 56 сьома готовых изделий, образующие BepTi-i- кзльнУб ояды 64 технологического инструмента операции обратного напраеленич чем достигается съем готоаь.х изделий при
5 прямом и обратном движении половины 5 составной матрицы, при этом половина 6 неподвижна.
Ротационное роторно-конвейерное устройство для холодной штамповки работает
0 следующим образом. Включением электродвигателя 2 приводятся 30 вращательное движение радиальный ротор 3 с кольцеви- ми держателями 12, 13- 16, 17, на которых смонтирован технологичес ий инструмент
5 вертикальных рядов 30-31 соответственно с внешней и внутренней образующей радиального ротора 3. Технологический инструмент вертикального ряда 30 обеспечен приводом поступательного движения в виде приводных колец 32-37. э возвратное обеспечивается с помощью поужин или копира
(на чертеже не показаны). Технологический инструмент вертикального ряда 31 обеспечен приводом поступательного движения в виде приводных колец . 37, а возвратное обеспечивается с помощью копирнных у -ройств А1. устанавливаемых в секторах 7-10 технологической обработки и секторе 11 сьема готовых изделий. Технологический инструмент вертикальных рядов 30, 31 взаимодействует с составной матрицей, в от- верстиях половин 5 и 6 которой обрабатываемая заготовка проходит все операции в секторах 7-10.
Непрерывно подаваемые по направляющим 65 из механизма роторного питания заготовки, укладываются в пазы 66 кольцевого держателя 12, из которых переталкиваются заталкивателями 18 с помощью приводного кольца 32 в отверстия половин 5 и 6 составной матрицы в секторе 4 затал- кивания заготовок. После загрузки составной матрицы заготовкой она взаимодействием с копирным устройством 51 посоедством тяги 49 и ролика 50 перемещается прерывисто в каждый из секторов 7-10 технологической обработки и секторе сьема 11 готовых изделий, подвергаясь обработке технологическим инструментом вертикальных рядов 30, 31 внешней ч внутренней образующих pr диaлbиoгo ротора 3 с последующим выталки1эанием готового изделия.
Матрицы 23-26 технологической обработки, не имеющие выталкивателей, с глухим дном редуцирующей полости 67 имеют сквозное отверстие 68 для выхода воздуха в процессе редуцирования стержня заготовки. Поступательное движение матриц 23-26 технологической обработки, как и матриц 28 с выталкивателями 29 съема гото- вых изделий, осуществляется воздействием на них приводных колец 33-36, 37 в секторах 7-11. Возвратное движение матриц 23- 26 и матриц 28 с выталкивателями 29, осуществляется с помощью взаимодейст- ВИЯ их роликов 46 с копирными устройствами 47. смонтированными соответственно для каждого из секторов 7-10, 11.
Поступательное движение выталкивателей 29 матриц 28 сектора 11 осуществля- ется воздействием на них кольца 38, вращающегося синхронно с приводным кольцом 37 и установленного с возможностью поперечного перрме1дения в выборке 40 последнего с целью регулирования хода выталкивателей 29, обеспечиваемого установкой кольца 38 н,э различный эксцентриситет в выборке 40 приводного кольца 37.
Это достигается либо взаимодействием двух пар эксцентриков 39 с кольцом 38, либо
взаимодействием кольца 38 с установленным внутри него кольцом 39 с эксцентричным отверстием, имеющим возможность разворота в выборке 40 приводного кольца 37,
Происходит постоянный разворот кольца 39 в выборке 40 в направлении,обратном вращению приводного кольца 37 при включенном тормозном устройстве 44, чем достигается стабильность установленного эксцентриситета кольца 38 относительно оси вращения приводного кольца приводного кольца 37. Растормаживанием (кратковременным) тормозного устройства 44 происходит изменение эксцентриситета кольца 38, а значит изменение хода выталкивателя 29. Последующее затормаживание тормозным устройством 44 стабилизирует эксцентриситет кольца 38 относительно оси приводного кольца 37,
Работа составной матрицы в другом варианте осуществляется следующим образом.
В секторе 4 загрузки заготовка задается заталкивателем 18 в загрузочное отверстие 69 или 70 в зависимости от направления прерывистого возвр.зтно-поступательного движения половины 5 составной матрицы, При этом все операции штамповки будут происходить поочередно в зависимости от направления движения половины 5. либо в отверстиях 59-62 половины 5, либо в отверстиях 59-62 половины 6 составной матрицы. Выталкивание производится в полость пуансон-опоры 56.
Ротационное роторно-конвейерное устройство позволяет изготавливать крепежные детали типа болтов и гаек широкой номенклатуры, что расширяет его технологические возможности.
Формула изобретения
1. Ротационное роторно-конвейерное устройство, состоящее из приводного радиального ротора с секторами заталкивания заготовок, их технологической обработки и сьема готовых изделий, содержащего равномерно располом енные по окружности блоки инструмента с матрицами и установленными в радиальном направлении пуанспнями, связанного с приводами механизмов возвратно- поступательного движения злтялкмвателей, пуансонов и выталкивателей соответствующих секторов, отличающееся тем, что, с целью расширения технологичпгких возможностей, оно снабжено копьцепыми держателямиматрицсекторовтехнологической обработки и сьомл готовых изделий, кольцевыми держатеп г м1 ссютнет- ствуюи1их им пуансонов, а з гл кива- телей сектора заталкиианич, , Ч:сг.-)пными
матрицами транспортирования заготовок из сектора заталкивания в последующие сектора технологической обработки и съема готовых изделий, при этом кольцевые держатели матриц и соответствующие им кольцевые держатели пуансонов, а также заталкивателей расположены со стороны внутренней и внешней образующих ротора соответственно в плоскостях, нормальных к оси его вращения, матрицы, пуансоны и за- талкиватели которых образуют между собой вертикальные ряды технологического инструмента, а составные матрицы транспортирования установлены в вертикальных направляющих радиального ротора с возможностью возвратио-поступательного движения и взаимодействия с технологическим инструментом вертикальных рядов, причем матрицы блоков инструмента секторов технологической обработки и съема готовых изделий также как и соответствующие им пуансоны установлены с возможностью возвратно-поступательного движения в радиальном направлении,а их привод, так же как и привод соответствующих им пуансонов и привод заталкивателей. выполнен в виде эксцентрично расположенных относительно оси вращения ротора приводных колец.
2.Устройство поп,1,отличающее- с я тем, что привод выталкивателей сектора съема готовых изделий снабжен тормозным устройством и выполнен в виде расположенных в выемке приводного кольца с зубчатым валиком двух пар эксцентриков равного эксцентриситета и кольцевого элемента, смонтированного с возможностью взаимодействия с эксцентриками,
3.Устройство поп,1,отличающее- с я тем, что привод выталкивателей сектора съема готовых изделий выполнен в виде расположенных в выемке приводного кольца с зубчатым валиком втулки с эксцентричным отверстием и колы ёвого элемента, установленных с возможностью взаимодействия один в другом, при этом зубчатый валик приводного кольца связывает зубчатый ве- нец втулк(, с эксцентричным отверстием с зубчатым венцом, устгГновленным а подшипниках станины с возможностью взаимодействия с тормозным устройством.
4.Устройство по пп. 1-3, отличающе- е с я тем, что кольцевой элемент приводы
выталкивателей сектора съема готовых изделий связан с боковыми стенками выемки приводного кольца посредством муфт.
5.Устройство по П.1, о т л и ч а tO щ е е- с я тем, что составная матрица транспрртирования заготовок состоит из двух половин, имеющих соосные между собой отверстия для установки в них заготовок, при этом одна из половин связана посредством тяги
и ролика с копирным устройством и выполнена с возможностью поперечного смещения продольной оси своего отверстия относительно продольной оси отверстия другой половины.
6.Устройство по п. 1. о т л и ч а ю щ е е- с я тем, что составная матрица транспорги- рования заготовок состоит из двух половин, на каждой из которых смонтированы с равным шагом пуансоны, образующие со сторо- ны внешней и внутренней образующих радиального ротора вертик зльные ряды технологического инструмента и установленные с возможностью взаимодействия с
ползунами кольцевых держателей радиального ротора, при этом одна из половин составной матрицы выполнена с возможностью дискретного возвратно-поступательного движения относительно неподвижной другой, закрепленной в вертикальной направляющей радиального ротора.
30 30
47 37 17
41
//J7,
1 Jir / у / 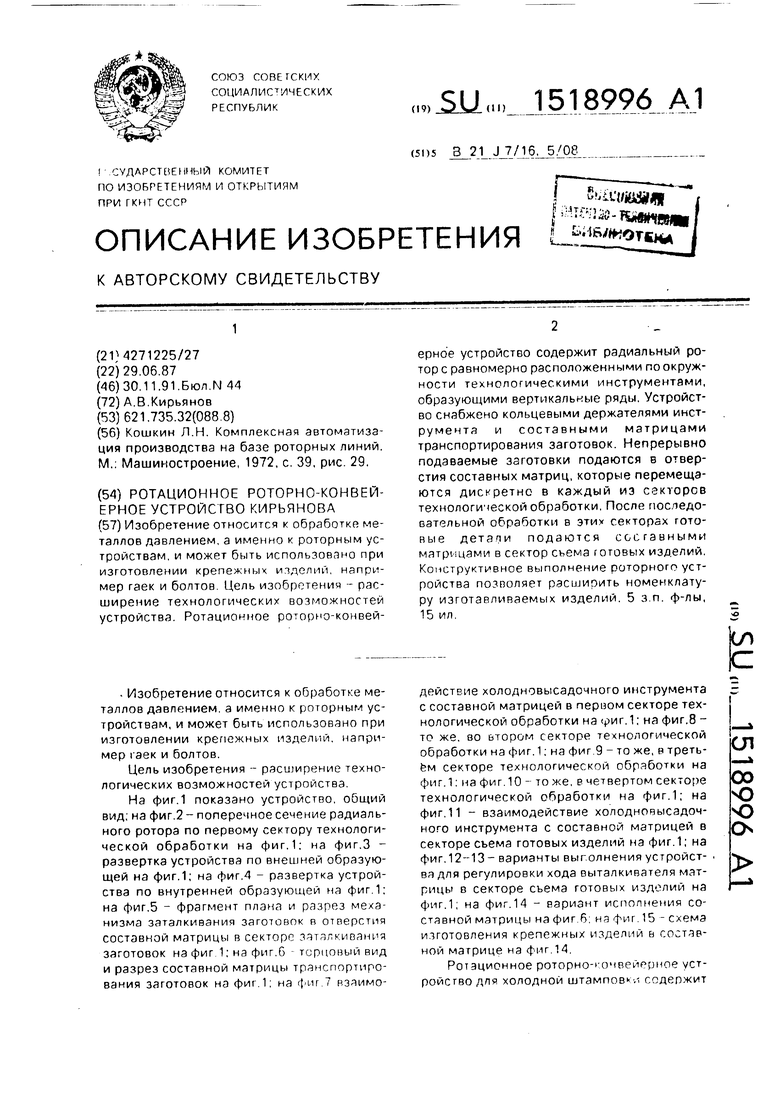
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционное роторно-конвейерное устройство для изготовления стержневых изделий типа гвоздей | 1988 |
|
SU1639852A1 |
| Рабочий ротор | 1976 |
|
SU632457A1 |
| Роторно-конвейерная машина | 1977 |
|
SU722823A1 |
| МНОГОПОТОЧНАЯ РОТОРНАЯ МАШИНА | 1972 |
|
SU343919A1 |
| Технологический ротор роторной машины | 1990 |
|
SU1750959A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
| МНОГОПОТОЧНАЯ РОТОРНАЯ МАШИНА | 1967 |
|
SU202698A1 |
| Роторно-конвейерная машина | 1980 |
|
SU940993A1 |
| Роторно-конвейерная машина | 1977 |
|
SU686808A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU244849A1 |
Изобретение относится к обработке металлов давлением, а именно к роторным устройствам, и может быть использовано при изготовлении крепежных изделий, например гаек и болтов. Цель изобретения - расширение технологических возможностей устройства. Ротационное роторно-конвейерно е устройство содержит радиальный роторе равномерно расположенными по окружности технологическими инструментами, образующими вертикальные ряды. Устройство снабжено кольцевыми держателями инструмента и составными матрицами транспортирования заготовок. Непрерывно подаваемые заготовки подаются в отверстия составных матриц, которые перемещаются дискретно в каждый из секторов технологической обработки. После пос.чедо- вательной обработки в этих секторах готовые детали подаются сосгавными матрицами в сектор сьема готовых изделий, Конструктивное выполнение роторного устройства позволяет расширить номенклатуру изготавливаемых изделий, 5 з.п, ф-лы, 15 ил.
щд
Xl
Jb
I 6f
ia
/
JL
J7
i
gr:;: ly fg
1036
J/7
гг
т
mff
J5
2SB.K
«Ч
u
ш
irZ7l1.37 .. .1.Л
37
27
a.г
й
.
rj
13
JJ
л
-...
..
37
Jf
JSx.
-v
J94
«v
JS-s
л-
ЛГх
Ms.
Лх
n n , n ГУ.
.nn .,о...
rj ::ioiijrzazn:-LL.jLLJJ,ii
in it);MlT :iOr r:i r1 pIIIOEIII lIIICE3IIIIZIIin
nmrnli 1иЖш сж1Ж1ж:ж11
ж it: Hi
pr: пгшзпп: Frr-TT-Tnr- r M hi лг-пг-ж
a. Л1:ш.1Ж
и ,{; эЦ1ДО ::с:ж-4 и ti hi ,11ЛЕ:ж:: 11 лз111
QLJJISUE
II 111 III
rfi Tfr Fr-T l in ir T T ill III Ш
Ж jr
IjR ).,.iJ -fcL- ...-Jllfij-1; -
Ш-1ЖЛ1-;: ягж .TirrsPBiiiCja--Ш. tit.: iii. Ш.1Д
1аЕ1 11 Шсжпо1сл1ос| gif-iooirjH и. н И1ЛТ7
JUI -W ЧИ l- «Я| . ..-.f... . ,«. -.«.«..«.Ji..-, ..«....,11.-. -rtJi.- .l.I.|ID.H 111.. f Pl . IIII-M .
Ж-Jit, j(Ei7 MiiiLjiLjciK:.:jiLiiin} ршзпж г с
.гж1пг::п.О:Т:. pcszsiiiiJEznoi
W l Ш Т Г -ТПH)aj-ЙТ Si/ J f -; aT:Щ ОТ -Я С W Ш
JIL
ЭС : р/С1ж:з Г гт--- - --Г JJ.«;.1Иг:: Г :ГЖ
$ t CE i--Li. :; I П n
л; I ..; :-- --; : i ; .
Ш
, I ,,4.J:i:ivJ
M.nn .,о...
rj ::ioiijrzazn:-LL.jLLJJ,ii
pIIIOEIII lIIICE3IIIIZIIin
pIIIOEIII lIIICE3IIIIZIIin
pr: пгшзпп: Frr-TT-Tnr- r M hi лг-пг-ж
a. Л1:ш.1Ж.
QLJJISUE
II 111 III
rfi Tfr Fr-T l in ir T T ill III Ш
...-Jllfij-1; -
.TirrsPBiiiCja--Ш. tit.: iii. Ш.1Д
JIL
f -; aT:Щ ОТ -Я С W Ш
JJ.«;.1Иг:: Г :ГЖ
:; I П n
: i ; .
Ш
, I ,,4.J:i:ivJ
.--- . ., , ..
, ,.- тп,- .- ::...
ФигЛ
Фиг,5
5 j
Фиг.6
3 20 1
6-5
$ 67 1 66 .
f-LФи9.8
У ,
IS
iX2. W
-L-4
ы.г.И
f5
35
г----- -7 -тгНг7ЧФиг, 12(Pus.i
63 62 6J 60 S9 70 -59 ff9 50 61 62 63
Ё
63 62 61 60 fS
17
37 36 1635-IS 3ft n ,33
59 ff9 50 61 62 63
/.
-UH
7 rr/ 7
59 60 61 62 63 иг. /4
JJ 3ft 35 36 37
| Кошкин Л.Н, Комплексная автоматизация производства на базе роторных линий, М,: Машиностроение, 1972, с, 39, рис, 29, |
