Изобретение относится к .машиностроению и .может быть испол1)3овано в мап1инах для литья под давлепием п,тастических масс.
Иелью изобретения является расширение техно,1огических возможностей устройства за счет увеличения рабочей зоны движения захватного механизма.
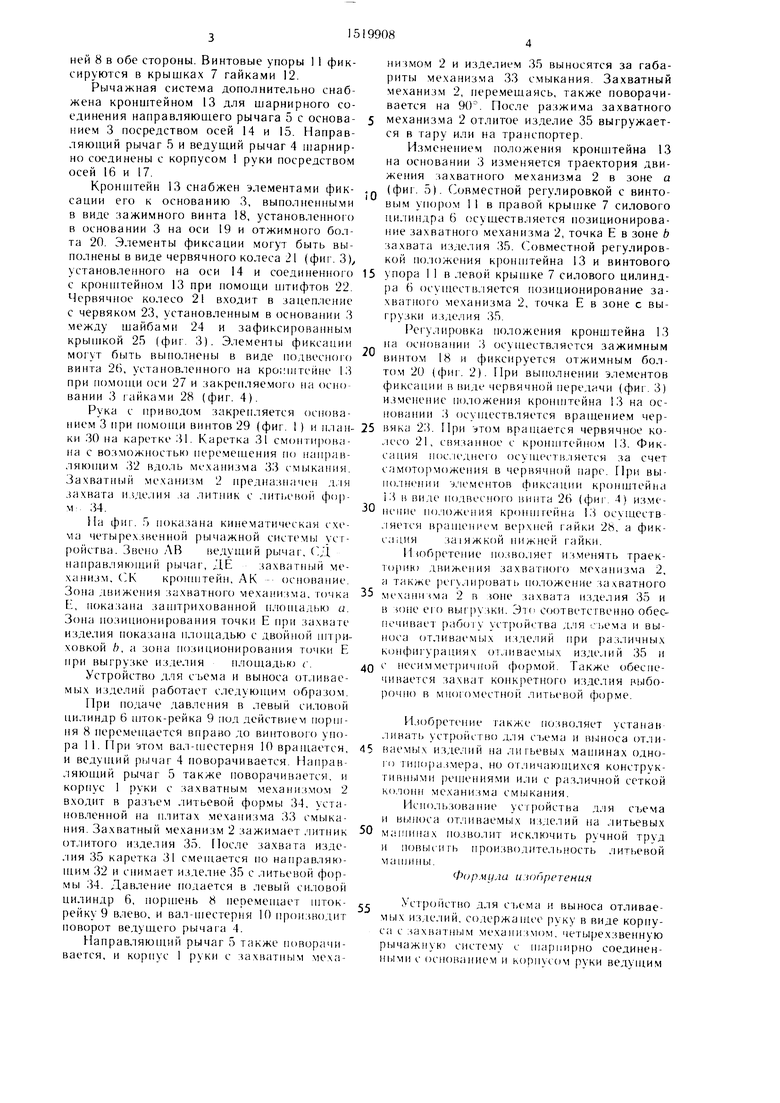
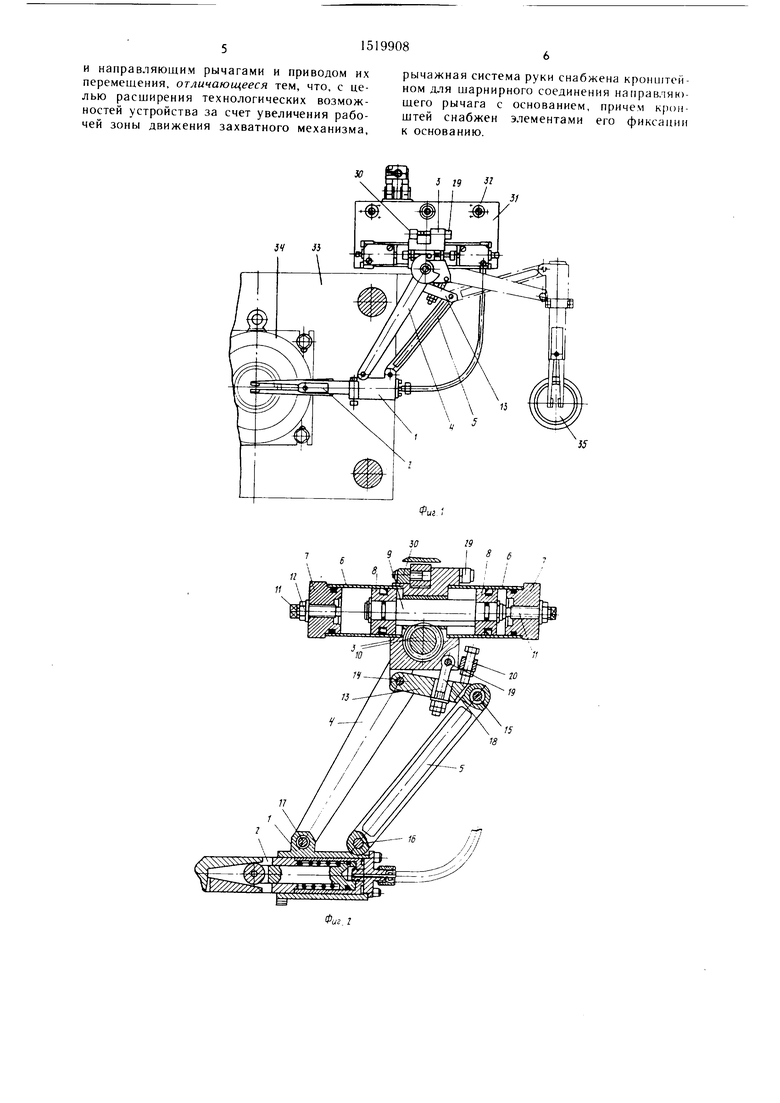
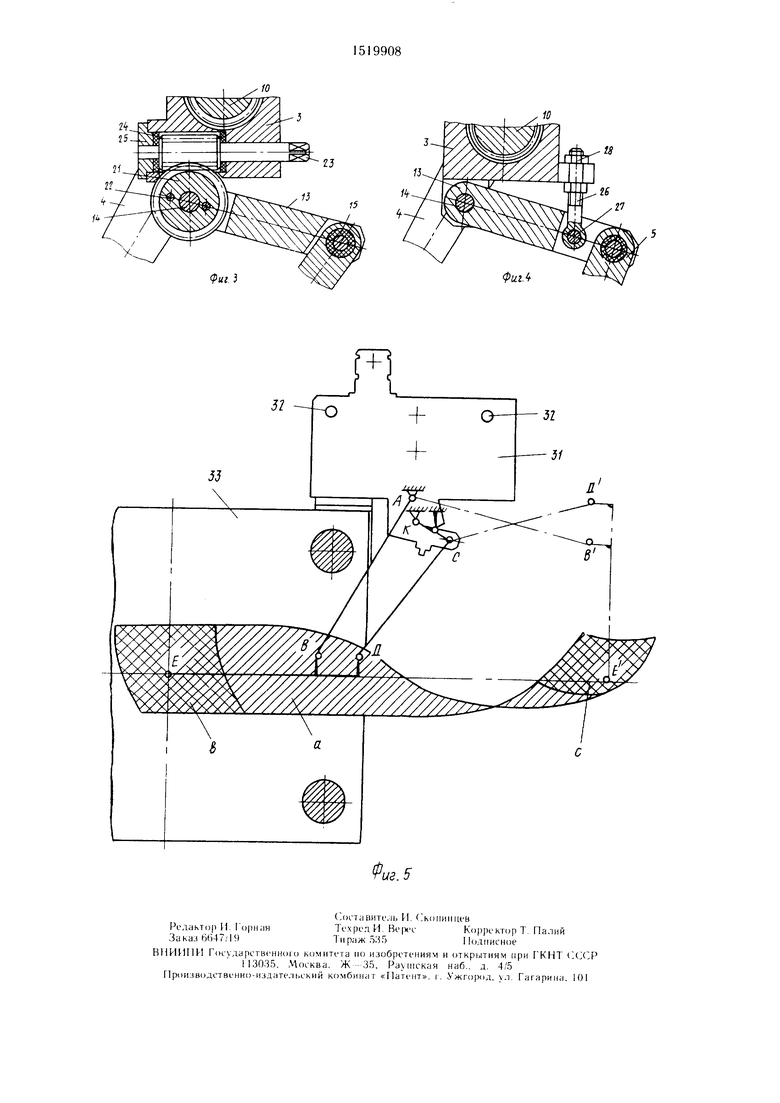
Иа фиг. I пока.зано устройство д.чя с ье.ма и выноса отливаемых изделий, обни1Й вид; на фиг. 2 - то же, продо.пьный разрез; на фиг. 3 - выполнение элементов фиксации в виде червячной передачи; на фиг. 4 выполнение элементов фиксации в виде под1нч - ного винта; на фиг. 5 - кинематическая схема рычажной системы устройства и рабочая зона движения захватиого механизма.
Устройство д,1я и В1 1носа отливаемых изде. П111 содержит руку в виде корпхса I с захватным ме.ханизмом 2, четырех;(ве||н ю р| 1чажную систему в виде П1арнирпо соединенных с основанием 3 и корпусом I ведупк го рычага 4 и направляюпичч) рыча га 5 и привод их перемеп1ения, вьп1олнениь:й в виде силовы.х цилипдров 6 с крьпнками 7 (фиг. 2). В силовьгх цили){драх 6 установлены nopnjHH 8, соедппенп1,1е 1пток-р1 йк()и . 111ток-)е11ка 9 входит в .auen, ieiine с иа.юм П1естерней К), на кото()(м 1 3aKpi4i,ieii вг. рычаг 4.
В крып1ках 7 пи,-1И11.()в ( ycraiioii.ifiu.i винтовые упо|)Ы 1 1 рггч,)к)1 хода поры
сл
;о ;о
о
00
ней 8 в обе стороны. Винтовые упоры 1 1 фиксируются в крышках 7 гайками 12.
Рычажная система дополнительно снабжена кронштейном 13 для шарнирного соединения направляюи1его рычага 5 с основанием 3 посредством осей 14 и 15. Направляющий рычаг 5 и ведущий рычаг 4 щарнир- но соединены с корпусом 1 руки посредством осей 16 и 17.
Кронштейн 13 снабжен элементами фиксации его к основанию 3, выполненными в виде :5ажимного винта 18, установленного в основании 3 на оси 19 и отжимного болта 20. Элементы фиксации могут быть выполнены в виде червячного колеса 21 (фиг. ЗЬ установленного на оси 14 и соединенного с кронштейном 13 при помощи ц тифтов 22. Червячное Ko;ieco 21 в.ходит в зацепление с червяком 23, установленным в основании 3 между шайбами 24 и зафиксированным крышкой 25 (фиг. 3). Элементы фиксации могут быть выполнены в виде подвесного винта 26, установленного на кро;:111тейне 13 при помощи оси 27 и закрепляемого на основании 3 гайками 28 (фиг. 4).
Рука с приводом закрепляется основанием 3 при помощи винтов 29 (фиг. 1 ) и нлан- ки 30 на каретке 31. Каретка 31 смо1Г1 И|)ова- иа с возможностью перемещения по направ- 32 вдоль ме.ха1П(зма 33 смыкания. Захватный механизм 2 предназначен для захвата изделия за литник с . uiTbiMioii фор- м 34.
На фиг. Г) показана кинематическая схема четырех.(венной рычажной системы усг- ройства. ЗЕНПЮ fi 1едущий рычаг, (Д направляющи рычаг, ДЕ захватн1)1Й механизм, ( К кронштейн, АК - основание. Зона д)иже1П1Я захватного механизма, точка Е, показана .хованной площадью а. Зона позиционирования точки Е при захвате изде,1ия показана пло|цадью с двойной штриховкой h, а зона позиционирования точки Е при выгрузке изделия плоп1адью г.
Устройство д,1я съема и выноса отливаемых изделий работает следующим образом.
При подаче давления в левый силовой цилиндр 6 ц ток-рейка 9 под действием поршня 8 перемещается вправо до винтового упора 11. При :)том вал- цестерня 10 вращается, и ведущий рычаг 4 поворачивается. Направляющий рычаг 5 также поворачивается, и корпус 1 )уки с захватным механизмом 2 входит в раз ьем литьевой формы 34, установленной на плитах .механизма 33 смыкания. Захватный механизм 2 зажимает .читник 1)т;п1того изделия 35. 1осле захвата изде- ,;1Ия 35 каретка 31 смещается по направляющим 32 и снимает изделие 35 с литьевой формы 34. Давление подается в левый силовой цилиндр 6, поршень 8 перемеп1ает шток- рейку 9 влево, и вал-шестерня 10 производит поворот ведущего рычага 4.
Направляющий рычаг 5 также поворачивается, и корпус 1 руки с захватным механизмом 2 и изделием 35 выносятся за габариты механизма 33 смыкания. Захватный механизм 2, пере.мещаясь, также поворачивается на 90°. После разжима захватного
механиз.ма 2 отлитое изделие 35 выгружается в тару или на транспортер.
Изменением положения кронштейна 13 на основании 3 изменяется траектория движения захватного механиз.ма 2 в зоне а
(фиг. 5). Совместной регулировкой с винтовым упором 1 1 в правой крышке 7 силового цилиндра 6 осуществляется позиционирование захватного механизма 2, точка Е в зоне b захвата изделия 35. Совместной регулировкой положения кронштейна 13 и винтового
5 упора I 1 в левой крышке 7 силового цилиндра 6 осуществ.ляется позиционирование захватного механизма 2, точка Е в зоне с выгрузки изделия 35.
Регулировка положения кронштейна 13 на основании 3 осуществляется зажимным винтом 18 и фиксируется отжимным болтом 20 (фиг. 2). При вьпкхпнении элементов фиксации в виде червячной передачи (фиг. 3) изменение положения крон1птейна 13 на основании 3 осуществляется врап1ением чер5 Бяка 2ii. При этом вращается червячное колесо 21, сЕ язанное с кронштейном 13. Фиксация последнего осуществляется за счет самото)П1ожения в червячной паре. При вы- по,лнении э/1сментов фиксации кронщтейна 13 и виде подвес}(Ого lunrra 26 (фиг. 4) изме0
неиие положения кронштейна 13 осуществ
ляется вращением верхней гайки 28, а фиксация за1яжкой нижней гайки.
11 (Обретение позволяет изменять траекторию движения захватного механизма 2, а также рег лироват1) по,-1оженне захватного
5 механичма 2 в зоне ; ахвата изделия 35 и в «)не ею выгрузки. Это соответственно обес- печи)ае1 работу устройства для ;:ьема и выноса отливаемых изделий при раз, 1ичных конфигурациях отливаем1)ГХ изделий 35 и
Q с несиммет|)ичной (})ормой. Также обеспечивается захват конкретного изделия вь1бо- рочно в MUOIOMecTHoii литьевой форме.
Изобретение также позволяет устанав ливат) устройство д.ля С 1л ма и вьшоса отли- 5 ваемых изделий на литьевых одного ти11())азмера, но orличаюпшхся конструк- тивн1)1ми решениями и;1и с различной сеткой колонн механизма см1)1кания.
Ис1И).льзова ние устройства для стрема
и выноса от, 1иваемьгх изделий на ;|итьевых
0 машинах позволит исключить ручной труд
и повысить пр()изв()дитель}юсть литьевой
MaiiiMinji.
Формула и:(претения
г Усгр(Я1ство для стл ма и выноса отливае- мьгх издс,лий, содержащее руку в виде корпуса с захнатным механизмом, четырехзвенную рычажную систему с (нарпирно соединенными с оснона 1ием п KopnyccjM руки ведущим
и направляющим рычагами и приводом их перемещения, отличающееся тем, что, с целью расширения технологических возможностей устройства за счет увеличения рабочей зоны движения захватного механизма.
рычажная система руки снабжена кронштейном для щарнирного соединения направляющего рычага с основанием, причем крон- штей снабжен элементами его фиксации к основанию.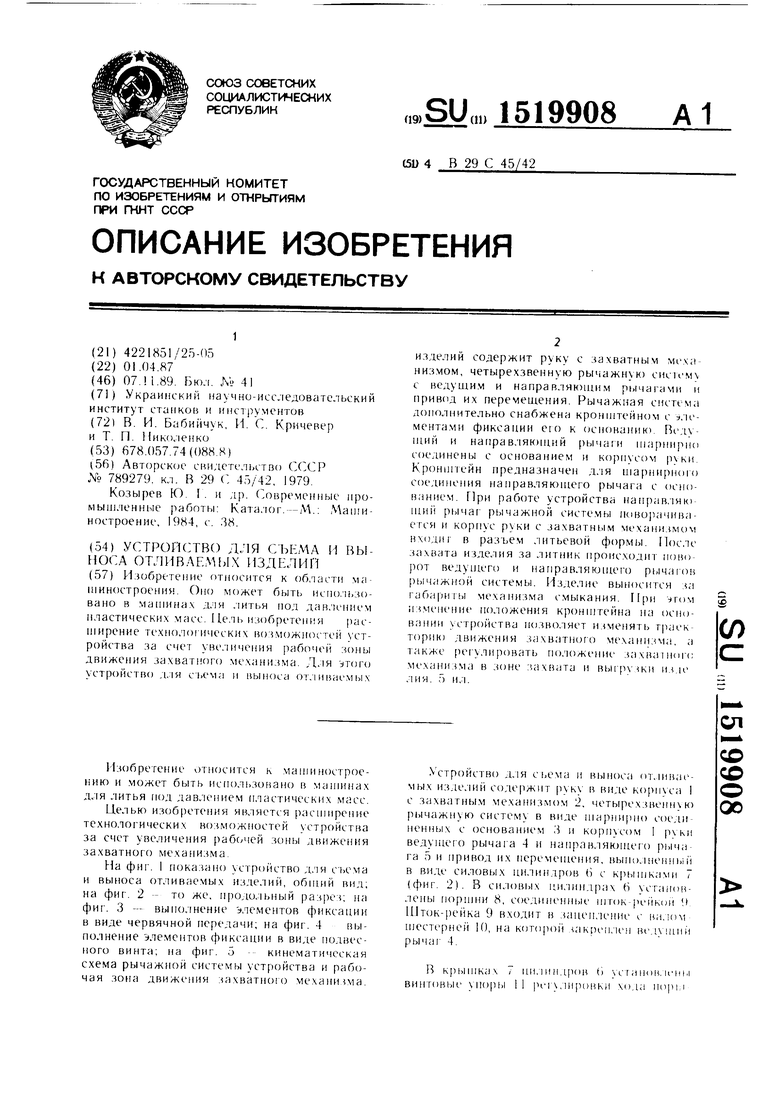
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для удаления изделий из формующей оснастки литьевой машины | 1987 |
|
SU1431949A1 |
| Захватное устройство для удаления изделий из формирующей оснастки литьевой машины | 1987 |
|
SU1426822A1 |
| Манипулятор | 1986 |
|
SU1437213A1 |
| Устройство для сборки охватываемой и охватывающей деталей типа вал-втулка | 1982 |
|
SU1215255A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| ЛИТЬЕВОЙ АГРЕГАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПОЛИМЕРНЫХ ФОРМОВЫХ ИЗДЕЛИЙ | 1969 |
|
SU233877A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
Изобретение относится к области машиностроения, оно может быть использовано в машинах для литья под давлением пластических масс. Цель изобретения - расширение технологических возможностей устройства за счет увеличения рабочей зоны движения захватного механизма. Для этого устройство для съема и выноса отливаемых изделий содержит руку с захватным механизмом, четырехзвенную рычажную систему с ведущим и направляющим рычагами и привод их перемещения. Рычажная система дополнительно снабжена кронштейном с элементами фиксации его к основанию. Ведущий и направляющий рычаги шарнирно соединены с основанием и корпусом руки. Кронштейн предназначен для шарнирного соединения направляющего рычага с основанием. При работе устройства направляющий рычаг рычажной системы поворачивается и корпус руки с захватным механизмом входит в разъем литьевой формы. После захвата изделия за литник происходит поворот ведущего и направляющего рычагов рычажной системы. Изделие выносится за габариты механизма смыкания. При этом изменение положения кронштейна на основании устройства позволяет изменять траекторию движения захватного механизма, а также регулировать положение захватного механизма в зоне захвата и выгрузки изделия. 5 ил.
ZJ
иг. 3
IS
Фиг4
| Устройство для удаления изделий из литьевой машины | 1979 |
|
SU789279A1 |
| кл | |||
| Солесос | 1922 |
|
SU29A1 |
| Козырев К) | |||
| Г | |||
| и др | |||
| ( овременные нро- мьпиленные работы: Ката.чог | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
