1
(21)4404263/27-03
(22)29.02.88
(46) 23.11.89. БЮЛ. № 43
(71)Производственное объединение Уралмаш
(72)C.E. Ерошенко и В.В. Черданцев
(53)621.867(088.8)
(56)Авторское свидетельство СССР № 973454, кл. В 65 G 47/00, 1979.
Авторское свидетельство СССР № 419449, кл. В 65 G 47/00, 1972.
(54)КАНТОВАТЕЛЬ ДЛЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ
(57)Изобретение относится к подъемно-транспортным машинам и оборудованию и позволяет повысить надежность кантования стоп цилиндрических изделий за счет исключения их рассьшания при кантовке. Кантователь включает закрепленную на основании 1 поворотную платформу со взаимно перпендикулярными приемной и упорной площадками (П) 3,4. Поворотная платформа имеет привод перемешения в виде шармирно соединенного с ней основанием 1 гидро-, цилиндра 5. На основании установлен механизм фиксации стопы изделий 13, выполненный, в виде двух оппозитно расположенных кронштейнов (К) 7 со смонтированными в верхней части роликами 9. При этом К 7 связаны меяду собой пружиной и установлены на основании 1 в зоне опускания поворотной платформы через ;:.,.вертикальные оси 6. Приемная П 3 имеет опоры и установленную на них посредством упругих элементов плиту. При укладке стопы изделий 13 на П 3 вплотную к П 4 открывается кран управления гидроцилиндра 5. Под действием силы тяжести стопы изделий 13 платформа поворачивается и при взаимодействии изделий 13 с роли(Л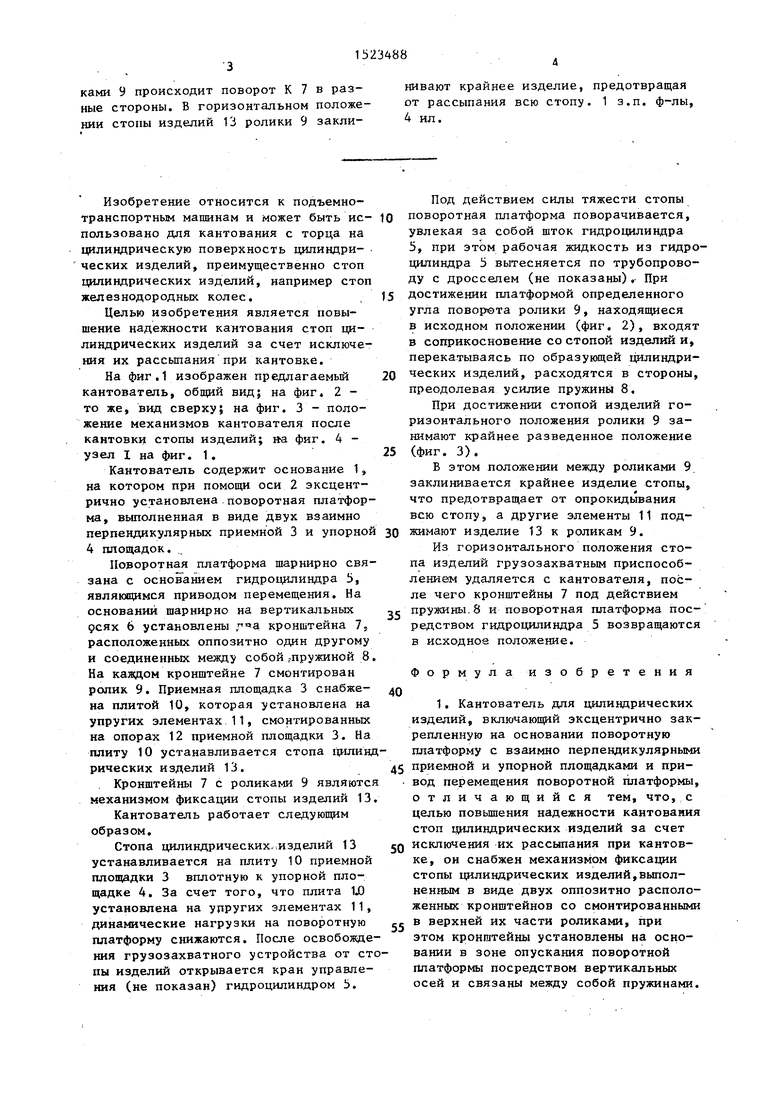
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь для цилиндрических изделий | 1982 |
|
SU1034968A1 |
| Кантователь | 1989 |
|
SU1613406A1 |
| Кантователь для цилиндрических изделий | 1980 |
|
SU901191A1 |
| КАНТОВАТЕЛЬ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ | 1996 |
|
RU2107651C1 |
| Устройство для кантования и подачи цилиндрических изделий | 1978 |
|
SU747783A1 |
| Способ кантования цилиндрических изделий | 1981 |
|
SU973454A1 |
| КАНТОВАТЕЛЬ ДЛЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1972 |
|
SU419449A1 |
| Кантователь для цилиндрических изделий | 1980 |
|
SU865743A1 |
| Кантователь для передачи цилиндрических изделий в приемное устройство | 1979 |
|
SU876543A1 |
| Кантователь для цилиндрических изделий | 1981 |
|
SU975528A1 |
Изобретение относится к подъемно-транспортным машинам и оборудованию и позволяет повысить надежность кантования стоп цилиндрических изделий за счет исключения их рассыпания при кантовке. Кантователь включает закрепленную на основании 1 поворотную платформу с взаимно перпендикулярными приемной и упорной площадками (П) 3,4. Поворотная платформа имеет привод перемещения в виде шарнирно соединенного с ней основанием 1 гидроцилиндра 5. На основании установлен механизм фиксации стопы изделий 13, выполненный в виде двух оппозитно расположенных кронштейнов (К) 7 со смонтированными в верхней части роликами 9. При этом К 7 связаны между собой пружиной и установлены на основании 1 в зоне опускания поворотной платформы через вертикальные оси 6. Приемная П 3 имеет опоры и установленную на них посредством упругих элементов плиту. При укладке стопы изделий 13 на П 3 вплотную к П 4 открывается кран управления гидроцилиндра 5. Под действием силы тяжести стопы изделий 13 платформа поворачивается и при взаимодействии изделий 13 с роликами 9 происходит поворот К 7 в разные стороны. В горизонтальном положении стопы изделий 13 ролики 9 заклинивают крайнее изделие, предотвращая от рассыпания всю стопу. 1 з.п. ф-лы. 4 ил.
СП ГС
со .iu
00 00
Фиг.1
ками 9 происходит поворот К 7 в разные стороны. В горизонтальном положении стопы изделий 13 ролики 9 заклиИзобретение относится к подъемно- транспортным машинам и может быть ис- пользовано для кантования с торца на цилиндрическую поверхность цилиндрических изделий, преимущественно стоп цилиндрических изделий, например стоп железводородных колес.
Целью изобретения является повышение надежности кантования стоп Щ1- линдрических изделий за счет исключения их рассьшания при кантовке.
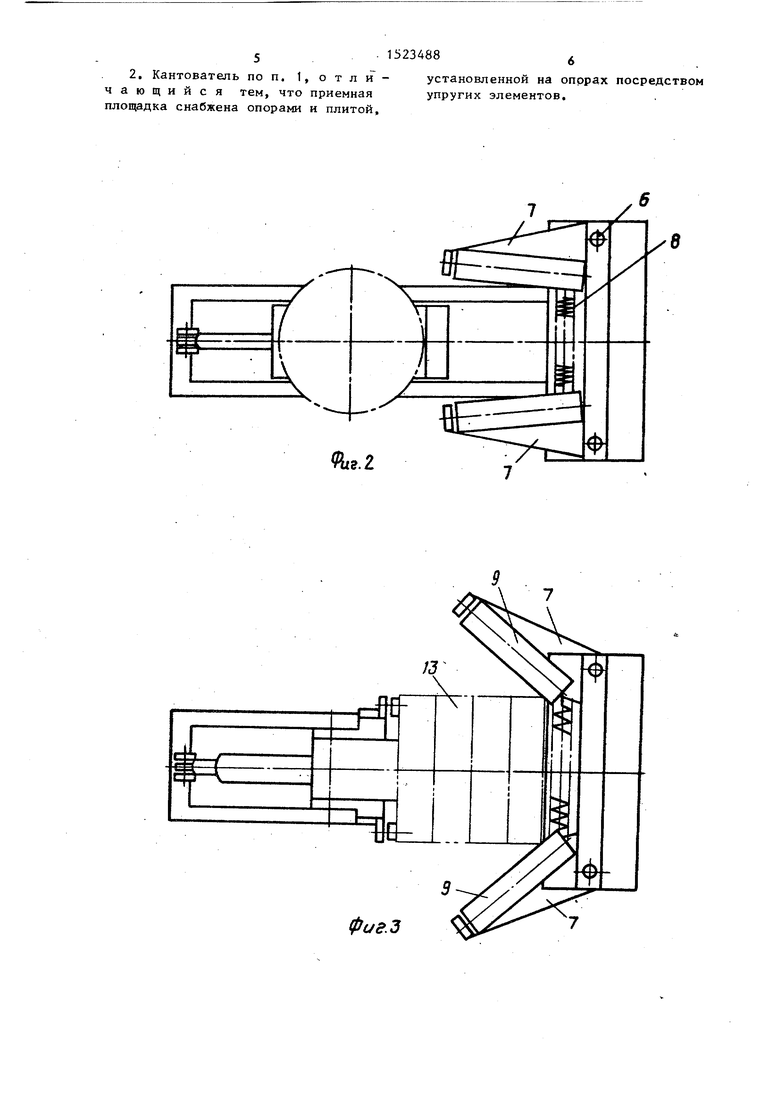
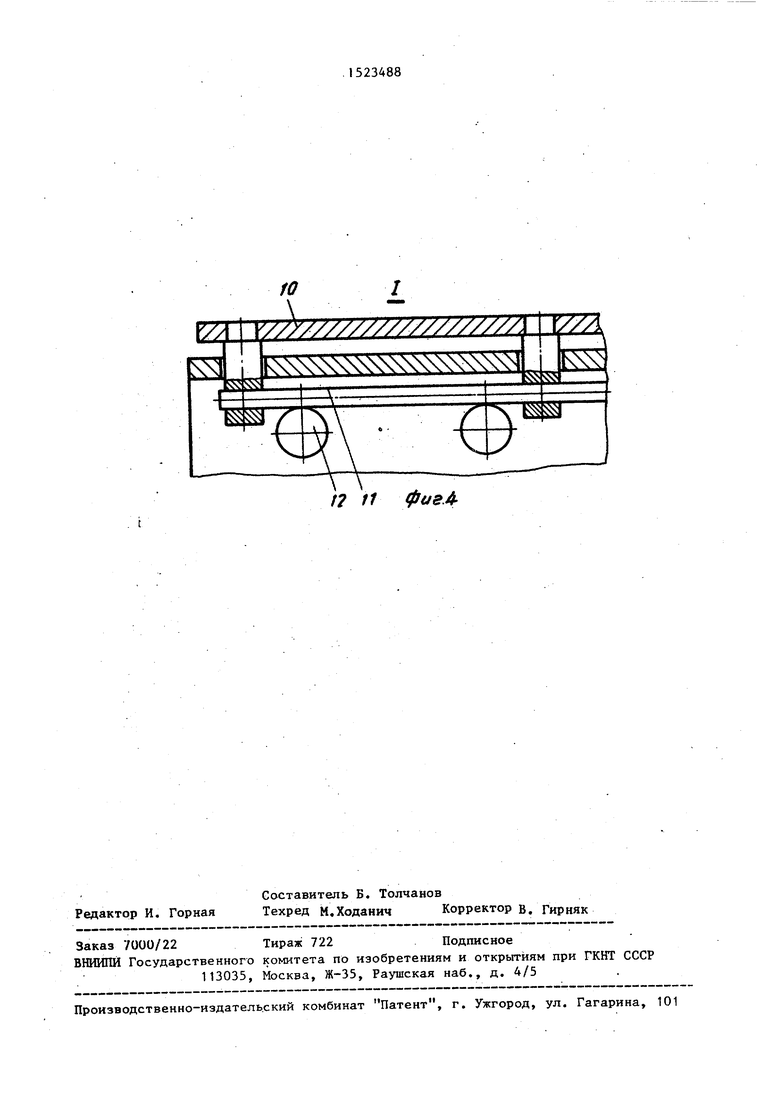
На фиг , 1 изображен предлагаемьй кантователь, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - положение механизмов кантователя после кантовки стопы изделий; на фиг. 4 - узел I на фиг. 1.
Кантователь содержит основание 1, на котором при помощи оси 2 эксцентрично установлена.поворотная платформа, выполненная в виде двух взаимно перпендикулярных приемной 3 и упорной 4 площадок. ..
Поворотная платформа шарнирно связана с основанием гидроцилиндра 3, являюпщмся приводом перемещения. На основании шарнирно на вертикальных 9СЯХ 6 установлены . кронштейна 7, расположенных оппозитно один другому и соединенных между собой ..пружиной 8 На кал5дом кронштейне 7 смонтирован ролик 9. Приемная площадка 3 снабже- на плитой 10, которая установлена на упругих элементах 11, смонтированных на опорах 12 приемной площадки 3. На плиту 10 устанавливается стопа цилиндрических изделий 13.
Кронштейны 7 с роликами 9 являются механизмом фиксации стопы изделий 13
Кантователь работает следуюпщм образом.
Стопа цилиндрических, изделий 13 устанавливается на плиту 10 приемной площадки 3 вплотную к упорной площадке 4. За счет того, что плита ЦЭ установлена на упругих элементах 11, динамические нагрузки на поворотную платформу снижаются. После освобождения грузозахватного устройства от стпы изделий открывается кран управления (не показан) гидроцилиндром 5.
нивают крайнее изделие, предотвращая от рассыпания всю стопу. 1 з.п. ф-лы, 4 ил.
Под действием силы тяжести стопы поворотная платформа поворачивается, увлекая за собой шток гидрощглиндра 5, при этом рабочая жидкость из гидро- цнлиндра 5 вытесняется по трубопроводу с дросселем (не показаны), При достижении платформой определенного угла поворота ролики 9, находящиеся в исходном положении (фиг. 2), входят в соприкосновение со стопой изделий и, перекатываясь по образующей цилиндрических изделий, расходятся в стороны, преодолевая усилие пружины 8.
При достижении стопой изделий горизонтального положения ролики 9 занимают крайнее разведенное положение (фиг. 3).
В этом положении между роликами 9 заклинивается крайнее изделие стопы, что предотвращает от опрокидывания всю стопу, а другие элементы 11 поджимают изделие 13 к роликам 9.
Из горизонтального положения стопа изделий грузозахватным приспособлением удаляется с кантователя, после Чего кронштейны 7 под действием пружины.8 и поворотная платформа посредством гидроцилиндра 5 возвращаются в исходное положение.
Формула изобретения
5 1 23488
чающийся тем, что приемнаяупругих элементов,
площадка снабжена опорами и плитой.
%г.2
фиг.
10
w.
V////////////////////.
ijj
V П 11 фаеЛ
//л
ss
3
