Изобретение относится к станкостроению и может быть использовано для автоматической подачи заготовок в роторно-конвейерных линиях.
Целью изобретения ябляется распш- рение технологических возможностей ротора путем обеспечения автоматической переналадки ротора на вьщачу другой номенклатуры заготовок.
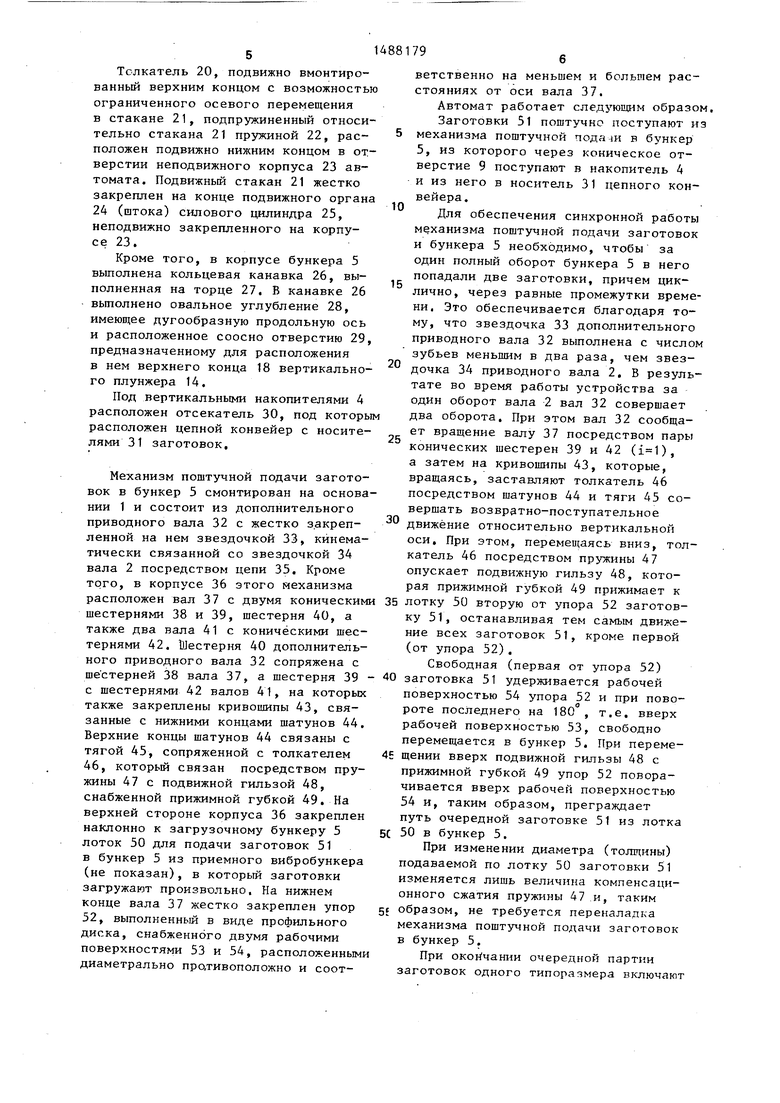
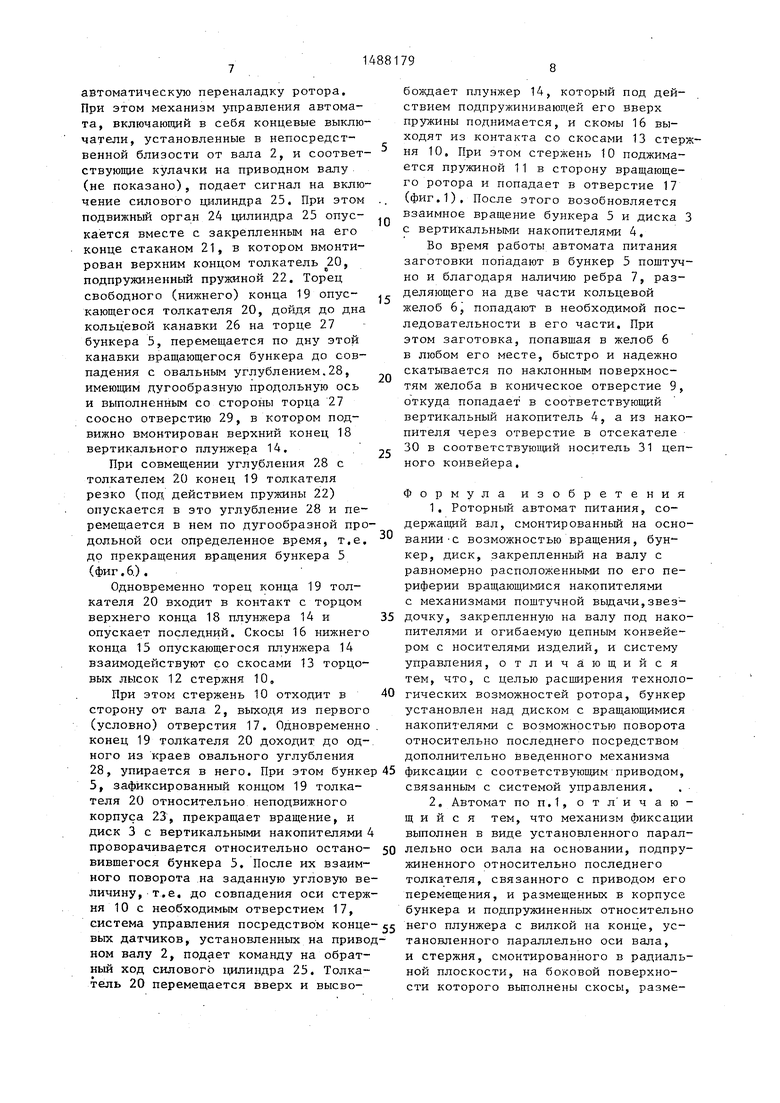
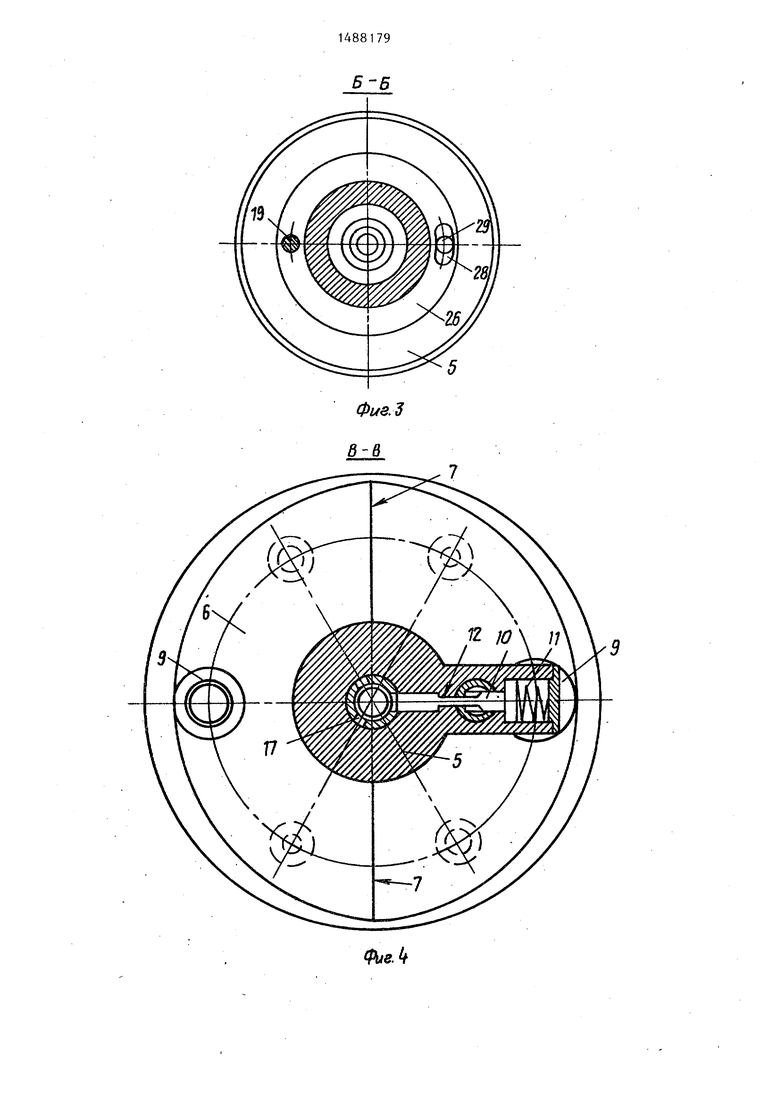
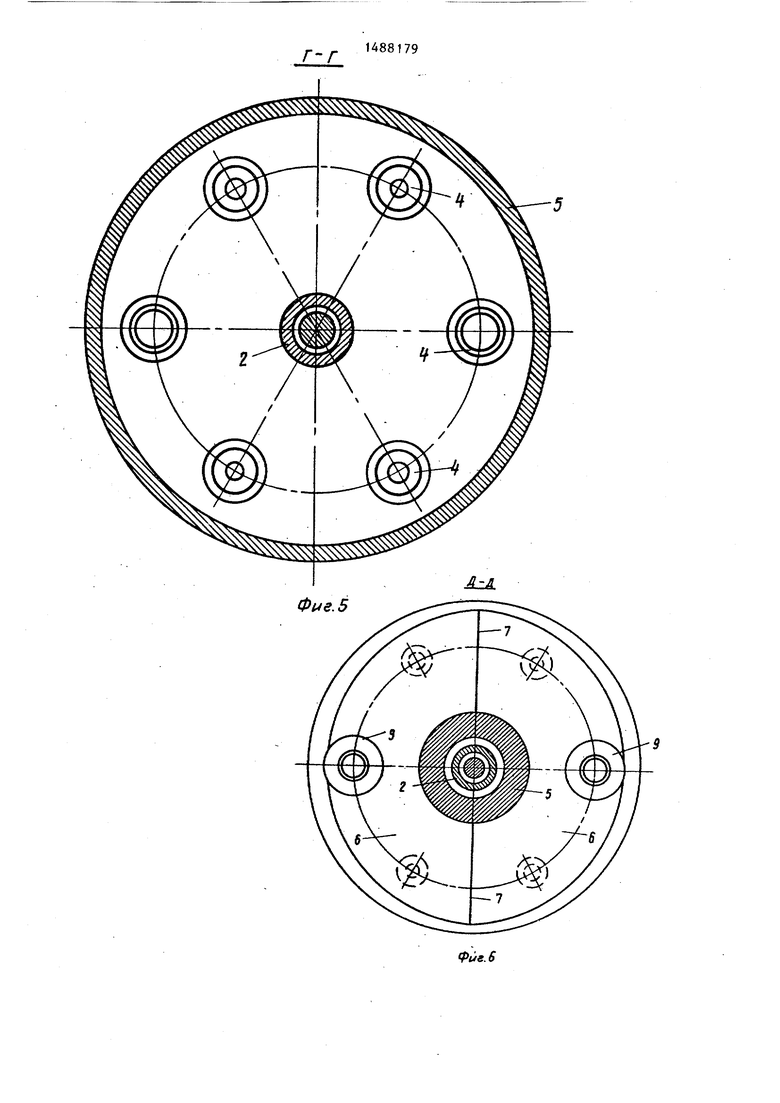
На фиг.1 изображен роторный автомат питания для загрузки заготовок в носители цепного конвейера, вид сбоку; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг,2; на фиг.4 - разрез В-В на фиг.2; на фиг.З - разрез Г-Г на фиг. 2; на фиг.6 -разрез Д-Д на фиг.2; на фиг.7 - разрез А-А на фиг.1 В момент расфиксации бункера с валом; на фиг.8 - разрез Е-Е на фиг.1; на фиг.9 - разрез Ж-Ж на фиг.1.
Роторный автомат питания для загрузки заготовок в носители цепного конвейера содержит установленный на основании 1 с возможностью вращения вал- 2, На валу 2 закреплен диск 3 с равномерно закрепленными по его периферии накопителями 4, установлен ными с возможностью вращения.
Накопители 4 вьтолнены различными по внутреннему диаметру, например трех различных размеров, а их общее количество, например, равно шести (фиг.4), Причем каждые два одинаковы накопителя расположены на диаметрально противоположных сторонах. На валу 2 установлен свободно с возможностью
5
0
О
5
5
вращения бункер 5. Рабочая емкость бункера 5 представляет собой кольцевой желоб 6, разделенный на две части посредством диаметрально расположенного ребра 7, которое образовано пересечением двух вогнутых в сторону оси бункера поверхностей 8, В углублении каждой из двух половин желоба 6 вьшолнено коническое отверстие 9 для выхода любой из предусмотренных для подачи заготовок, причем отверстия 9 выполнены так, что их общая геометрическая ось расположена диаметрально и нормально к ребру 7.. В верхней части корпуса бункера 5 вмонтирован подвижно в осевом и нормальном к оси вала 2 направлении стержень 10, который подпружинен пружиной 11 в сторону вала 2 и в средней части имеет две торцовые лыски 12 со скосами 13.
В верхней части корпуса загрузочного бункера 5 смонтирован нормально к оси стержня 10 и параллельно оси вала 2 вертикальный плунжер 14, подпружиненный относительно корпуса 6yri- кера 5. Кроме того, нижний конец 15 вертикального плунжера 14 выполнен в виде вилки со скосами 16, сопряженными со скосами 13 стержня 10.
По периферии цилиндрической поверхности вала 2 равномерно расположены три отверстия 17 для входа в них поочередно свободного конца стержня 10. Верхний конец 18 вертикального плунжера 14 торцом может . периодически контактировать с торцом свободного конца 19 толкателя 20.
Толкатель 20, подвижно вмонтированный верхним концом с возможностью ограниченного осевого перемещения в стакане 21, подпружиненный относительно стакана 21 пружиной 22, рас- положен подвижно нижним концом в отверстии неподвижного корпуса 23 автомата. Подвижный стакан 21 жестко закреплен на конце подвижного органа 24 (штока) силового цилиндра 25, неподвижно закрепленного на корпусе 23.
Кроме того, в корпусе бункера 5 выполнена кольцевая канавка 26, выполненная на торце 27. В канавке 26 выполнено овальное углубление 28, имеющее дугообразную продольную ось и расположенное соосно отверстию 29, предназначенному для расположения в нем верхнего конца 18 вертикального плунжера 14.
Под вертикальными накопителями 4 расположен отсекатель 30, под которы расположен цепной конвейер с носителями 31 заготовок.
Механизм поштучной подачи заготовок в бункер 5 смонтирован на основании 1 и состоит из дополнительного приводного вала 32 с жестко закрепленной на нем звездочкой 33, кинематически связанной со звездочкой 34 вала 2 посредством цепи 35, Кроме того, в корпусе 36 этого механизма расположен вал 37 с двумя коническим шестернями 38 и 39, шестерня 40, а также два вала 41 с коническими шестернями 42. иестерня 40 дополнительного приводного вала 32 сопряжена с шестерней 38 вала 37, а шестерня 39 с шестернями 42 валов 41, на которых также закреплены кривошипы 43, связанные с нижними концами шатунов 44. Верхние концы шатунов 44 связаны с тягой 45, сопряженной с толкателем 46, который связан посредством пружины 47 с подвижной гильзой 48, снабженной прижимной губкой 49. На верхней стороне корпуса 36 закреплен наклонно к загрузочному бункеру 5 лоток 50 для подачи заготовок 51 в бункер 5 из приемного вибробункера (не показан), в который заготовки загружают произвольно. На нижнем конце вала 37 жестко закреплен упор 52, выполненный в виде профильного диска, снабженного двумя рабочими поверхностями 53 и 54, расположенным диаметрально противоположно и соот0
0
5
0
5 0 Е С 5
ветственно на меньшем и большем расстояниях от оси вала 37.
Автомат работает следующим образом. Заготовки 51 поштучно поступают из механизма поштучной подачи в бункер 5, из которого через коническое отверстие 9 поступают в накопитель 4 и из него в носитель 31 цепного конвейера.
Для обеспечения синхронной работы механизма поштучной подачи заготовок и бункера 5 необходимо, чтобы за один полный оборот бункера 5 в него попадали две заготовки, причем циклично, через равные промежутки времени. Это обеспечивается благодаря тому, что звездочка 33 дополнительного приводного вала 32 выполнена с числом зубьев меньшим в два раза, чем звездочка 34 приводного вала 2, В результате во время работы устройства за один оборот вала 2 вал 32 совершает два оборота. При этом вал 32 сообщает вращение валу 37 посредством пары конических шестерен 39 и 42 (), а затем на кривошипы 43, которые, вращаясь, заставляют толкатель 46 посредством шатунов 44 и тяги 45 совершать возвратно-поступательное движение относительно вертикальной оси. При этом, перемещаясь вниз, толкатель 46 посредством пружины 47 опускает подвижную гильзу 48, которая прижимной губкой 49 прижимает к лотку 50 вторую от упора 52 заготовку 51, останавливая тем самым движение всех заготовок 51, кроме первой (от упора 52),
Свободная (первая от упора 52) заготовка 51 удерживается рабочей поверхностью 54 упора 52 и при повороте последнего на 180 , т.е. вверх рабочей поверхностью 53, свободно перемещается в бункер 5, При перемещении вверх подвижной гильзы 48 с прижимной губкой 49 упор 52 поворачивается вверх рабочей поверхностью 54 и, таким образом, преграждает путь очередной заготовке 51 из лотка 50 в бункер 5.
При изменении диаметра (толщины) подаваемой по лотку 50 заготовки 51 изменяется лишь величина компенсационного сжатия пружины 47 и, таким образом, не требуется переналадка механизма поштучной подачи заготовок в бункер 5.
При окончании очередной партии заготовок одного типоразмера включают
автоматическую переналадку ротора. При этом механизм управления автомата, включающий в себя концевые выключатели, установленные в непосредственной близости от вала 2, и соответствующие кулачки на приводном валу (не показано), подает сигнал на включение силового цилиндра 25. При этом подвижный орган 24 цилиндра 25 опус- кается вместе с закрепленным на его конце стаканом 21, в котором вмонтирован верхним концом толкатель 20, подпружиненный пружиной 22. Торец свободного (нижнего) конца 19 опус- кающегося толкателя 20, дойдя до дна кольц евой канавки 26 на торце 27 бункера 5, перемещается по дну этой канавки вращающегося бункера до совпадения с овальным углублением.28, имеющим дугообразную продольную ось и выполненным со стороны торца 27 соосно отверстию 29, в котором подвижно вмонтирован верхний конец 18 вертикального плунжера 14.
При совмещении углубления 28 с толкателем 20 конец 19 толкателя резко (под действием пружины 22) опускается в это углубление 28 и перемещается в нем по дугообразной продольной оси определенное время, т.е. до прекращения вращения бункера 5 (фиг. 6.).
Одновременно торец конца 19 толкателя 20 входит в контакт с торцом верхнего конца 18 плунжера 14 и опускает последний. Скосы 16 нижнего конца 15 опускающегося плунжера 14 взаимодействуют со скосами 13 торцовых лысок 12 стержня 10,
При этом стержень 10 отходит в сторону от вала 2, выходя из первого (условно) отверстия 17. Одновременно конец 19 толкателя 20 доходит до одного из краев овального углубления 28, упирается в него. При этом бунке 5, зафиксированный концом 19 толкателя 20 относительно неподвижного корпуса 23, прекращает вращение, и диск 3 с вертикальными накопителями проворачивается относительно остано- вившегося бункера 5. После их взаимного поворота на заданную угловую величину, т.е. до совпадения оси стержня 10 с необходимым отверстием 17, система управления посредством конце вых датчиков, установленных на привоном валу 2, подает команду на обратный ход силового цилиндра 25. Толкатель 20 перемещается вверх и высво
. , 5
5
0 5 50 cj 0
бождает плунжер 14, который под действием подпружинивающей его вверх пружины поднимается, и скомы 16 выходят из контакта со скосами 13 стержня 10. При этом стержень 10 поджимается пружиной 11 в сторону вращающего ротора и попадает в отверстие 17 (фиг.1). После этого возобновляется взаимное вращение бункера 5 и диска 3 с вертикальными накопителями 4.
Во время работы автомата питания заготовки попадают в бункер 5 поштучно и благодаря наличию ребра 7, разделяющего на две части кольцевой желоб 6J попадают в необходимой последовательности в его части. При этом заготовка, попавшая в желоб 6 в любом его месте, быстро и надежно скатьшается по наклонным поверхностям желоба в коническое отверстие 9, откуда попадает в соответствующий вертикальный накопитель 4, а из накопителя через отверстие в отсекателе 30 в соответствующий носитель 31 цепного конвейера.
Формула изобретения
1.Роторный автомат питания, содержащий вал, смонтированный на основании с возможностью вращения, бун-- кер, диск, закрепленный на валу с равномерно расположенными по его периферии вращающимися накопителями
с механизмами поштучной вьщачи,звездочку, закрепленную на валу под накопителями и огибаемую цепным конвейером с носителями изделий, и систему управления, отличающийся тем, что, с целью расширения технологических возможностей ротора, бункер установлен над диском с вращающимися накопителями с возможностью поворота относительно последнего посредством дополнительно введенного механизма фиксации с соответствующим приводом, связанным с системой управления.
2.Автомат поп.1, отл ичаю- щ и и с я тем, что механизм фиксации выполнен в виде установленного параллельно оси вала на основании, подпружиненного относительно последнего толкателя, связанного с приводом его перемещения, и размещенных в корпусе бункера и подпружиненных относительно него плунжера с вилкой на конце, установленного параллельно оси вала,
и стержня, смонтированного в радиальной плоскости, на боковой поверхности которого выполнены скосы, размещенные с возможностью сопряжения со скосами плунжера, причем толкатель установлен с возможностью .взаимодействия с верхним торцом плунжера, а стержень - с отверстиями, дополнительно выполненными на боковой поверхности вала,
3. Автомат ПОП.1, отличающийся тем, что в бункере выпол-
ней кольцевой желоб, разделенньш на две части ребром, дий -тетрально расположенным и образованнлм пересечением двух вогнутых в сторону оси бункера поверхностей, при этом на дне кон- кольцевого бункера в каждой его части выполнено коническое отверстие, расположенное соосно с вращающимися накопителями.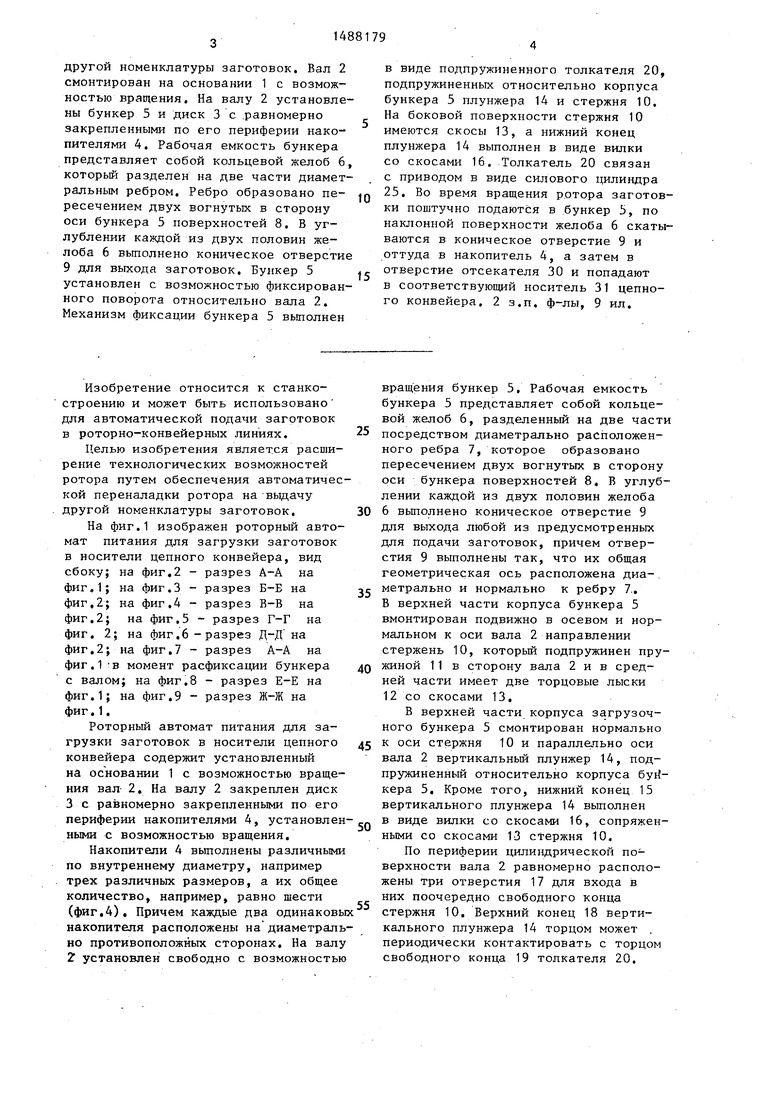
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная линия | 1987 |
|
SU1706837A1 |
| Роторный автомат питания | 1986 |
|
SU1419855A1 |
| Труборезный автомат | 1982 |
|
SU1055593A1 |
| АВТОМАТ ДЛЯ АБРАЗИВНОЙ ОТРЕЗКИ ПРИБЫЛИ НА РАБОЧЕЙ ЧАСТИ СПИРАЛЬНЫХ СВЕРЛ | 1971 |
|
SU292752A1 |
| Роторный автомат питания | 1987 |
|
SU1491654A1 |
| Загрузочный ротор | 1988 |
|
SU1553314A1 |
| УСТРОЙСТВО ДЛЯ ФРЕЗЕРОВАНИЯ ДЕТАЛЕЙ СЛОЖНОЙ | 1971 |
|
SU295676A1 |
| Агрегат для малоокислительного нагрева | 1968 |
|
SU448911A1 |
| СТАНОК ДЛЯ УДАЛЕНИЯ ОБЛОЯ ФОРМОВЫХ РЕЗИНОВЫХИЗДЕЛИЙ | 1967 |
|
SU205269A1 |
| Роторный автомат | 1990 |
|
SU1717317A1 |
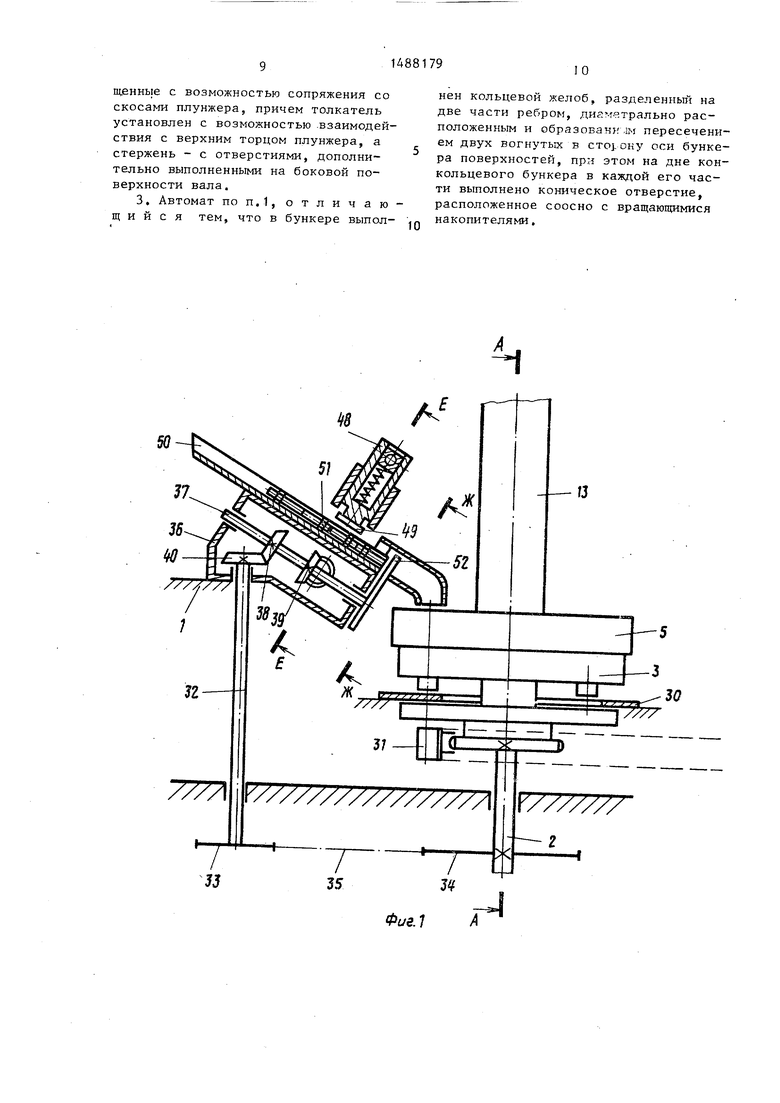

Изобретение относится к станкостроению и может быть использовано для автоматической подачи заготовок в роторно-конвейерных линиях. Целью изобретения является расширение технологических возможностей роторного автомата путем обеспечения автоматической переналадки его на выдачу другой номенклатуры заготовок. Вал 2 смонтирован на основании 1 с возможностью вращения. На валу 2 установлены бункер 5 и диск 3 с равномерно закрепленными по его периферии накопителями 4. Рабочая емкость бункера представляет собой кольцевой желоб 6, который разделен на две части диаметральным ребром. Ребро образовано пересечением двух вогнутых в сторону оси бункера 5 поверхностей 8. В углублении каждой из двух половин желоба 6 выполнено коническое отверстие 9 для выхода заготовок. Бункер 5 установлен с возможностью фиксированного поворота относительно вала 2. Механизм фиксации бункера 5 выполнен в виде подпружиненного толкателя 20, подпружиненных относительно корпуса бункера 5 плунжера 14 и стержня 10. На боковой поверхности стержня 10 имеются скосы 13, а нижний конец плунжера 14 выполнен в виде вилки со скосами 16. Толкатель 20 связан с приводом в виде силового цилиндра 25. Во время вращения ротора заготовки поштучно подаются в бункер 5, по наклонной поверхности желоба 6 скатываются в коническое отверстие 9 и оттуда в накопитель 4, а затем в отверстие отсекателя 30 и попадают в соответствующий носитель 31 цепного конвейера. 2 з.п.ф-лы, 9 ил.
7/7/
У////////////////л
33
Г///////
/ J4f
Фиг.1
гЛ
Фие.
15
-
/ W l J 42
T
dzzzzsS
Z
777fr
гв 2
7
Ж-Ж
5
D
35
| МНОГОНОМЕНКЛАТУРНЫЙ РОТОР ДЛЯ ЗАГРУЗКИ ДЕТАЛЕЙ В ГНЕЗДА ТРАНСПОРТНОЙ ЦЕПИ | 1965 |
|
SU224273A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
