Фа.1
.3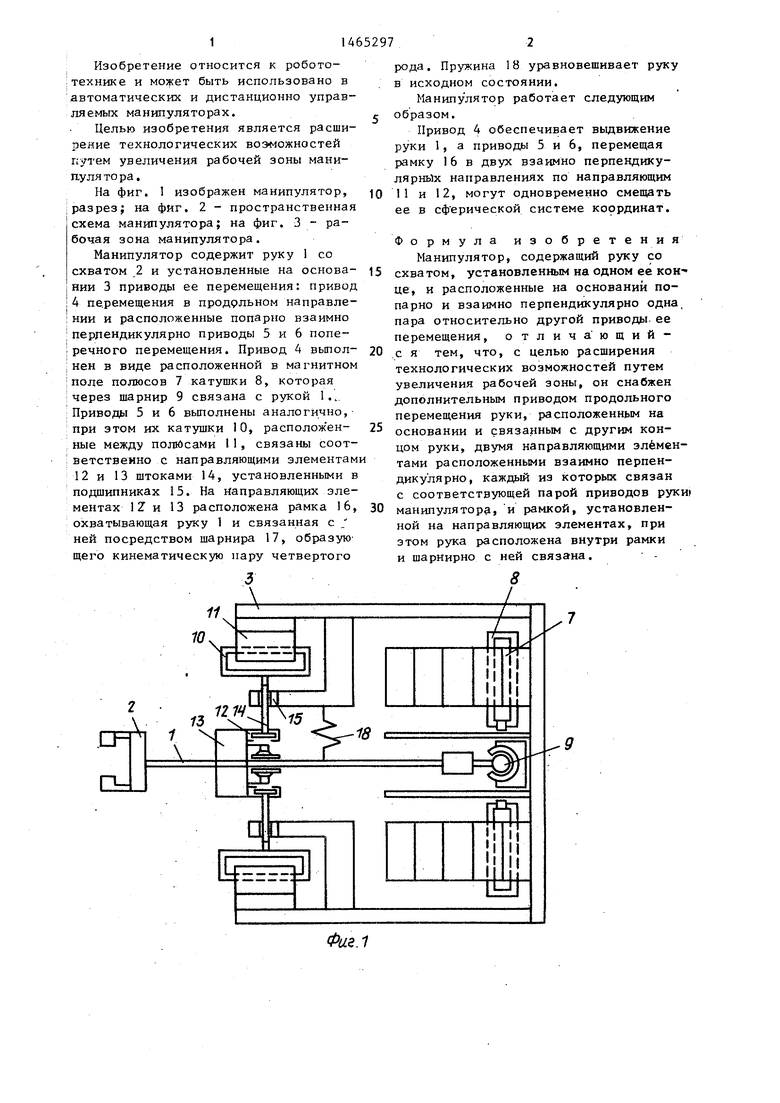
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1576314A1 |
| Манипулятор | 1976 |
|
SU538957A1 |
| Машина для сборки деталей | 1977 |
|
SU709314A1 |
| Механическая рука манипулятора | 1985 |
|
SU1283076A1 |
| Манипулятор для движения каретки тросового лифта вдоль троса | 2023 |
|
RU2823642C1 |
| Манипулятор | 1986 |
|
SU1454687A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Стан для поперечной прокатки тел вращения | 1987 |
|
SU1532168A1 |
| Манипулятор | 1980 |
|
SU908588A1 |
Изобретение относится к робототехнике и может быть использовано в автоматических и дистанционно управляемых манипуляторах. Целью изобретения является расширение технологических возможностей путем увеличения рабочей зоны манипулятора. Перемещение руки производится посредством привода 4 продольного перемещения и приводов 5 и 6 поперечного пе ремещения, которые могут работать одновременно. Приводы 5 и 6 связаны с рукой через рамку 16, устайовлен- ную на направляющих 12 и 13, при этом рука расположена в рамке 16 и шарнирно с ней связана с образованием кинематической пары четвертого рода. 2 ил.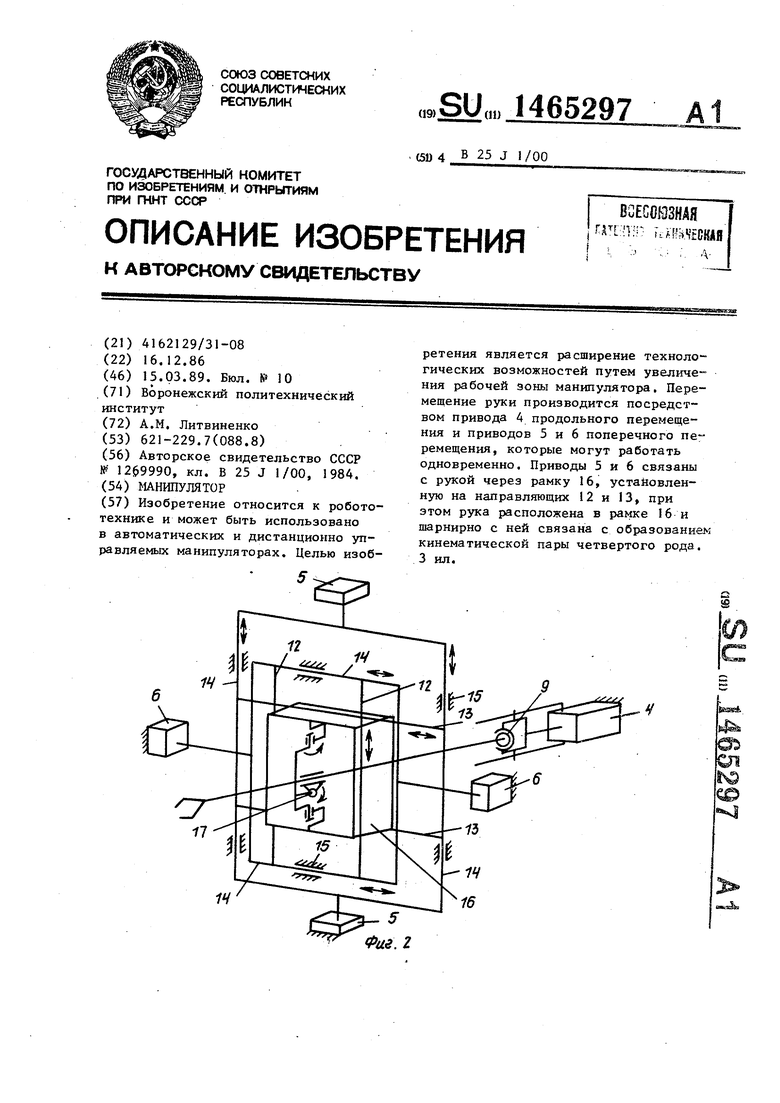
| Манипулятор | 1984 |
|
SU1269990A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
