Л
rs
Изобретение относится к подъемно- транспортному магаиностроению и может быть использовано для межоперационной транспортировки деталей и заготовок.
Цель изобретения - повышение надежности путем демпфирования динамических нагрузок.
На фиг, 1 изображен мос товой кран- манипулятор, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З разрез В-Б на фиг.1; на фиг.А - разрез В-В на фиг.2.
Мостовой кран-манипулятор содержит мост 1 с ходовыми колесами 2, установленными на подкрановые пути 3. На мосту 1 расположена тележка 4, на которой смонтирован кронштейн 5. На последнем подвижно смонтирован ползун 6, приводимый в движение .силовым цилиндром 7.
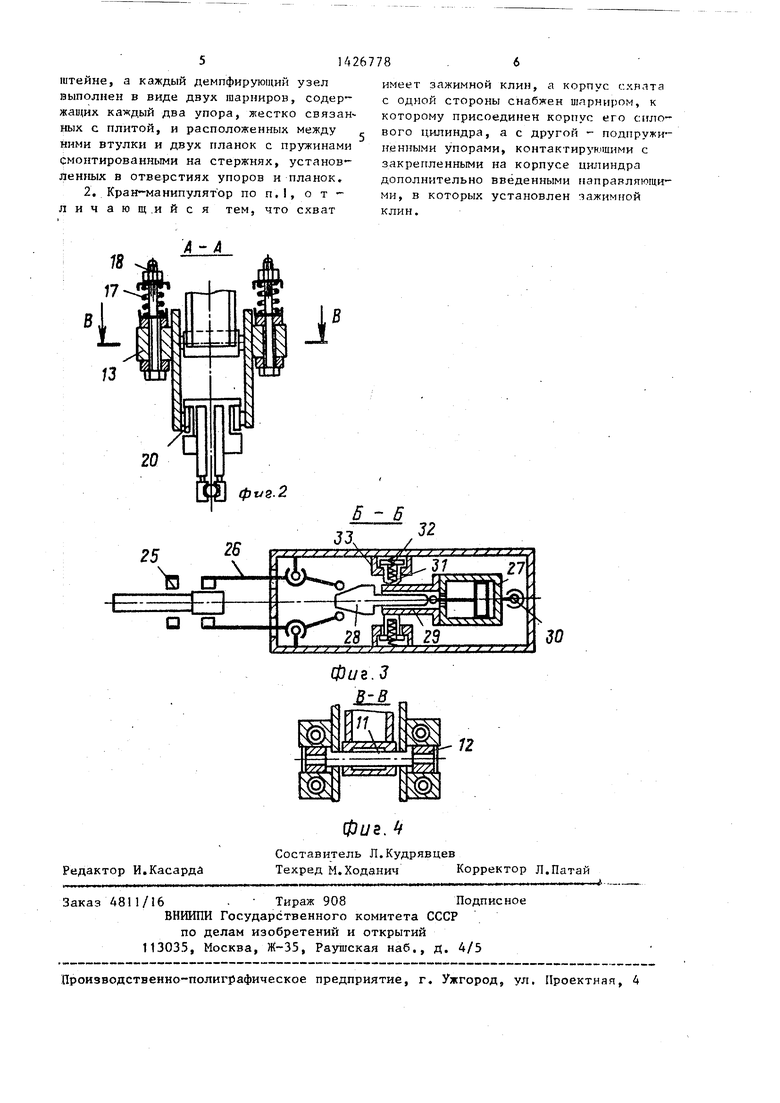
С ползуном 6 подвижно соединен кронштейн 8, который приводится в возвратно-поворотное движение силовым цилиндром 9. Корпус последнего закреп лен на ползуне 6, а плунжер шарнирно соединен с поводком 10, жестко скрепленным с кронштейном 8. На последнем смонтирована ось 11, которая обеими сторонами установлена в демпфирующем узле, состоящем из шарнирной втулки 12, упоров 13, жестко скрепленных с плитой 14 (подвеской), планок 15 и 16, прижатых к упорам 13, пружин 17 смонтированных на стержнях 18.
Аналогично связан с подвеской 14 и шток дополнительного силового цилиндра 19, корпус которого шарнирно связан с кронштейном 8. Подвеска 14 катками 20 подвижно соединена с на- правляющими 21. корпуса схвата 22. Кроме того, она связана также с корпусом схв ата 22 через жесткую связь 23, шарнир 24 которой смонтирован между вертикально расположенными планками 15 и 16, примыкающими к упорам 13 посредством горизонтально расположенных пружин 17, одетых на горизонтальные стержни 18,
В корпусе схвата 22 расположены , две пары клещей 25 и 26 соответствен- но. Каждая пара клещей имеет свой индивидуальный гидропривод с параллельным подводом рабочей жиJ; кocти. Гидропривод состоит из цилиндра 27 с возможностью перемещения клина 28 в направляющей втулке 29. Корпус цниинд ра 27 закреплен на корпусе схвата 22 через шарнир 30, а направляющая втул
ка 29 расположена между упорами 31, которые пружинами 32 поджаты к упору 33. При этом направляющая втулка 29 жестко скреплена с корпусом цилиндра 27.
Мостовой кран-манипулятор работает следующим образом.
При включении привода моста 1 (не показан) манипулятор движется к заготовке 34 (заготовке или таре, где уложены заготовки), перемещая схват 22 по продольной координате с остановкой в заданном месте.
При включении привода перемещения тележки 4 (не показан) осуществляется перемещение схвата 22 по поперечной координате с остановкой в заданном месте.
При включении силового цилиндра 7 ползун 6 пepeмeщaetcя по кронштейну 5. При этом вместе с ползуном 6 перемещаются кронштейн 8, подвеска 14 и схват 22. Клещи 25 и 26 схвата 22 устанавливаются в рабочее положение для зажима заготовки
При необходимости корректировки положения схвата 22 в горизонтальной плоскости включается силовой цилиндр 9. Плунжер гидроцилиндра 9 приходит в движение, перемещая находящийся с . ним в зацеплении поводок 10, которьй, будучи жестко связанным с кронштейном 8, поворачивает его относительно ползуна 6. Вместе с кронштейном 8 поворачивается подвеска 14. со схватом 22 до нужного положения клещей 25 и 26 схвата 22. При необходимости коррекции положения схвата 22 в вертикальной плоскости включается дополнительный силовой цилиндр 19, шток которого поворачивает- подвеску 14 относительно оси 11. Вместе с подвеской поворачивается и схват 22.
После того, как клещи 25 и 2.6 схвата 22 занимают правильное положение относительно заготовки 34, производят ее зажим. Это осуществляется. следующим образом. Включается сило- вой цилиндр 27. При движении его поршня со штоком влево перемещается в направляющей втулке 29 влево связанный шарнирно со штоком клин 28. При этом клещи 26 поворачиваются (расклиниваются) и сжимают заготовку 34. Аналогично поворачиваются (расклини ваются) клещи 25 от своих силового цилиндра и клина (на фиг.1 не пока заны),
Заготовка 34 зажимается в двух точках, что обеспечивает надежность и универсальность фиксации заготовок с разлдаными поверхностями и увеличенными длинами консолей.
При перемещении тележки 4 заготовка 34, зажатая клещами 25 и 26, подаг ется в штамповое пространство ГКМ,
водят в движение стержни 18. При этом, пружины 17, сидящие на стержнях 18, сжимаются.
Аналогично осуществляются движения планок 16, стержней 18 и пружин 17, смонтированных на штоке дополнительного силового цилиндра 19.
При действии на подвеску 14 силы.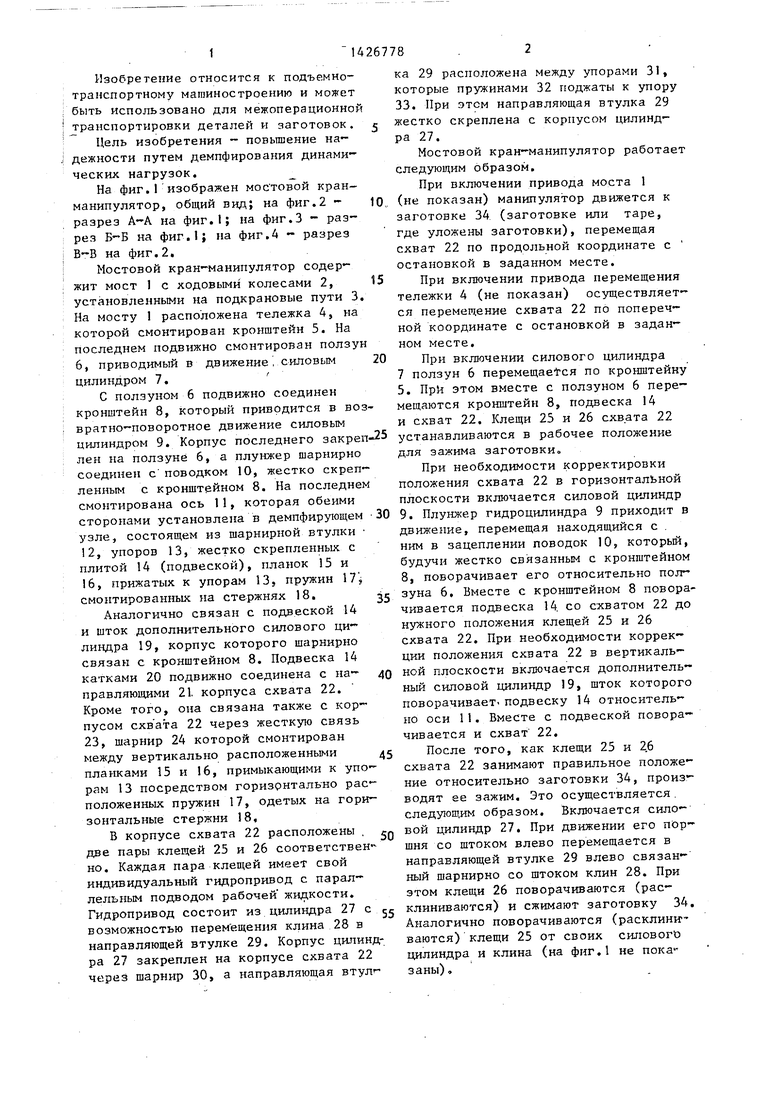

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Линия многооперационной штамповки | 1987 |
|
SU1532153A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Промышленный робот | 1986 |
|
SU1348166A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
Изобретение относится к подъем- но-транспортному машиностроению и может быть использовано для межоперационной транспортировки деталей и заготовок. Целью изобретения является повышение надежности путем демпфирования динамических нагрузок. При обработке заготовки 34 часть динамической нагрузки от нее передается через схват 22 подвеске 14. Если сила действует на подвеску 14 сверху вниз, то подвеска имеет возможность переместиться в этом же направлении. При .этом планки 15 остаются неподвижными, так как их перемещению препятствует ось и установленные на ней шарниры. Пленки 16 перемещаются вместе с примыкающими к ним упорами 13, жестко связанными с перемещающейся подвеской 14 Эти планки при своем перемещении приводят в- движение стержни 18, и пружины 17 сжимаются. Благодаря этому воспринимается часть динамической нагрузки. Аналогично осуществляется движение планок 16, стержней 18 и пружин 17, смонтированных на штоке дополнительного силового цилиндра 19. При действии на подвеску 14 силы, направленной снизу вверх, неподвижными останутся планки 16 и стержни 18. Упоры 13 и планки 15 переместятся вверх, сжимая пружины 17. Горизйнталь- но направленные динамические нагрузки через схват 22 посредством шарнира 24 уменьшаются аналогичным образом. 1 з.п. ф-лы, 4 ил. «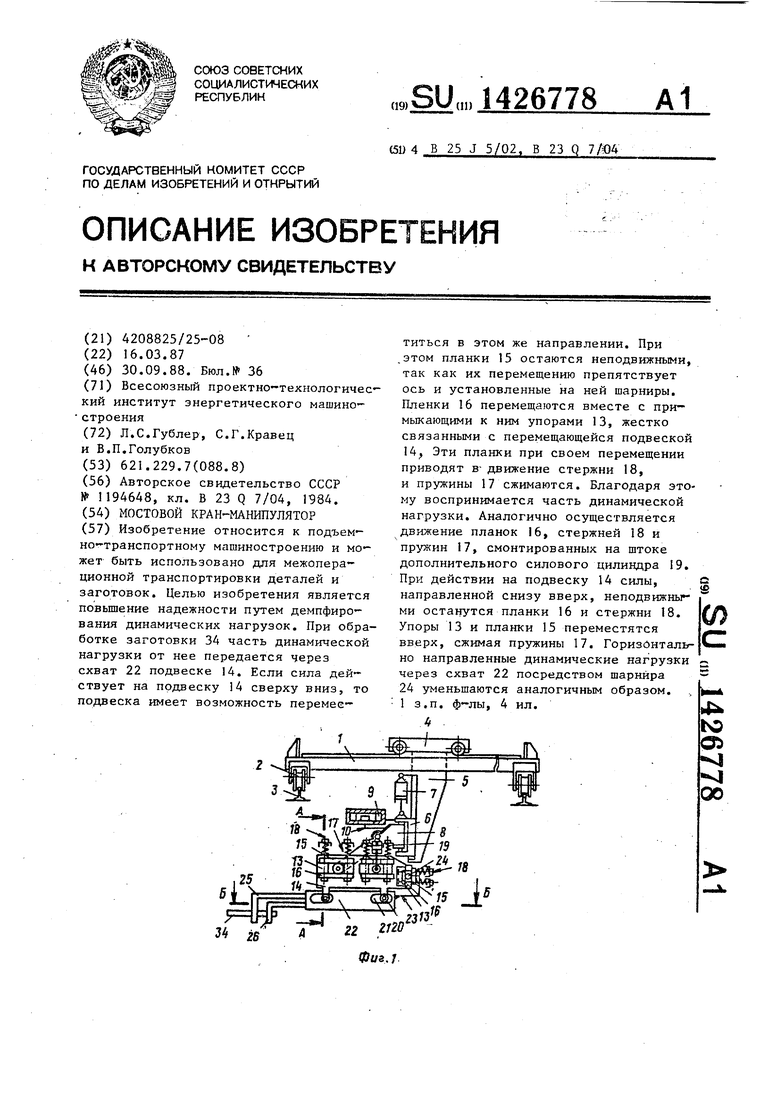
устанавливается в ручей матрицы и фик-ю направленной снизу вверх, неподвижсируется на жестком упоре. При наезде на упор (не показан) заготовка 34 со схватом 22 останавливаются, а те-i лежка 4 вместе с кронштейном 5,ползуном 6, кронштейном 8, подвеской 14 продолжают движение, причем подвеска 14 своими катками 20 перемещается в пазах 21 до срабатьюания конечного выключателя (не показан), который отключает привод тележки 4 и останав -- ливает ее.
При перемещении подвески 14 относительно схвата 22 вместе с ней перемещаются и упоры 13, которые увлекают за собой планку 16. Вместе с последней перемещаются стержни 18. Пружины, одетые на стержнях 18, сжимаются, так как их двигкенрпо препятствует планка 15, которая остается не
подвижной, поскольку упирается в шар- нир 24, смонтированный на жесткой связи 23, закрепленной на корпусе схвата 22, стоящем неподвижно вместе с заготовкой 34 на жестком упоре ГКМ При отходе после штамповки (высадки) заготовки 34 от жесткого упора, схват 22 относительно подвески 14 занимает исходное положение ПОД действием пружин Г/, одетььч на стержни 18. При штамповке часть динамической нагрузки, идущей на формообразование заготовки 34, передается на звенья манипулятора. Работа манипулятора по снижению передачи этой нагрузки в
вертикальной плоскости осуществляется 45 ку с механизмом поворота схвата.
следующим образом. Сила, воздействующая на заготовку 34 через схват 22, передается на подвеску 14.
При действии на подвеску 14 силы, направленной сверху вниз, она имает возможность мягко переместиться в том же направлении. При этом планки 15 остаются неподвижными, так как их перемещению препятствуют ось 11 и установленные на ней шарниры. Планки 16 перемещаются вместе с при- мьжающими к ним упорами 13, жестко связанными с перемещающейся подвеской 14. Планки 16, перемещаясь, при
ными остаются планки 16 и стержни 18. Упоры 13 и планки 15 перемещают- , ся вверх, сжимая пружины 17. Аналогично осуществляются движения планок упоров и пружин на штоке цилиндра 19.
действии динамической нагрузки в горизонтальной плоскости на заготовку, последняя передает ее на клещи 25 и 26 схвата 22, которые поворачиваются при этом каждый соответственно на своем шарнире.
Плечи клещей 25 и 26, контактирующих с заготовкой 34, поворачиваются в одну сторону, а плечи клещей 25 и 26, контактирующих с клином 28, - в другую сторону. При этом в ту же сторону отклоняется на шарнире 30 жесткая система, содержащая клин 28, направляющую втулку 29 и силовой ци-
линдр 27,
Все указанные перемещения обеспечиваются возможным попеременным перемещением упоров 31 в упорах 33 при сжатии пружин 32, которые и снижают передачу динамической нагрузки на корпус схвата 22.
Формула изобретения
5
имеющим кронштейн, который смонтирован на механизме вертикального перемещения схвата, отличающий - с я тем, что, с целью повышения надежности путем демпфирования динамических нагрузок, подвеска выполнена в виде плиты, снабженной тремя демпфирующими узлами, один из которых связан с корпусом схвата, второй - с кронштейном механизма поворота, а третий - с штоком дополнительно вве :денного силового цилиндра коррекции вертикального перемещения схвата, корпус которого закреплен на кронА- А
J
5fiJ .2
Фиг.З
Фие.
Редактор И.Касарда
Составитель Л.Кудрявцев
Техред М.Ходанич Корректор Л.Патай
| Мостовой кран-манипулятор | 1984 |
|
SU1194648A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
