Изобретение относится к машиностроению и может быть использовано для оснащения технологического оборудования устройствами для групповой загрузки деталей в кассеты.
Цель изобретения - повышение производительности за счет повьштения скорости поворота барабана.
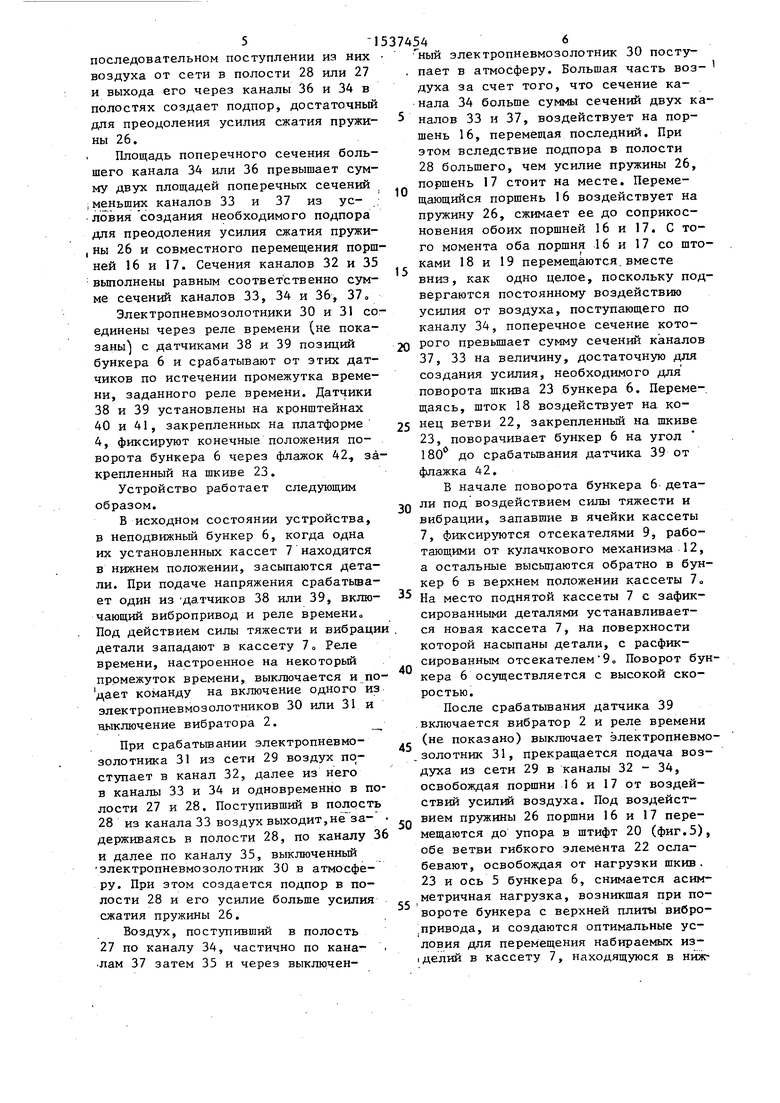
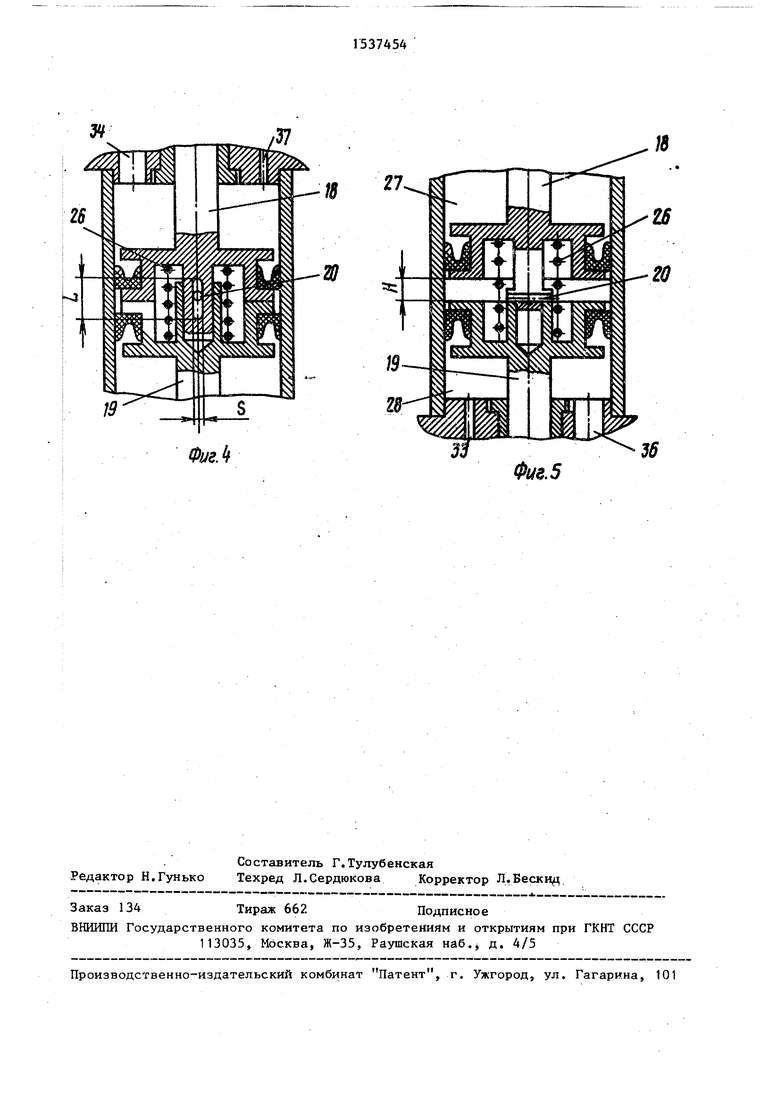
На фиг.1 изображено устройство, общий вид; на фиг.2 - вид А на фиг.1 на фиг.З - узел I на фиг.2; исходное положение; на фиг.4 - то же, в начальный момент поворота бункера; на фиг.З - то же, при повороте бункера в крайнее левое положение, положение поршней крайнее нижнее после прекращения подачи воздуха.
Устройство содержит установленный на основании 1 вибропривод, состоящий из вибратора 2, пружин 3 и платформы 4.
На горизонтальной оси 5 вращения установлен с возможностью колебательного движения вокруг последней и останова в крайних точках бункер 6 с установленными на нем многоместными кассетами 7 для загружаемых деталей 8 и отсекателями 9, выполненными из листовой резины, смонтированными на пластинах 10, установленными с возможностью возвратно-поступательного перемещения от пружин 11 и кулачковго механизма 12. Отсекатели 9 имею отверстия 13, соответствующие отверстиям в кассетах 7.
Соответствующий привод поворота бункера 6 выполнен в виде пневмоцилиндра 14, установленного на кронштейне 15, закрепленного на основа5
0
5
0
5
0
5
нйи 1, и имеет два поршня 16 и 17 со штоками 18 и 19, оппозитно располо-v
женными и соединенными между.собой при помощи жестко закрепленного в штоке 19 штифта 20, размещенного в пазу 21 штока 18.; Ширина паза S соответствует диаметру штифта 20. Каждый шток 18 и 19 соединен соответственно с одним из концов гибкого элемента 22, жестко прикрепленного к ч шкиву 23, установленного на горизонтальной оси 5, и огибающего направляющий шкив 24, закрепленный с возможностью вращения на основании 1.
Длина гибкого элемента 22 регулируется с помощью соединительных муфт
25(фиг.2) так, что отсутствует всякое предварительное натяжение его и он свободно провисает на направляю- щем шкиве 24 при разжатых пружиной
26на штоках 18 и 19 до упора штифта 20 в верхнюю кромку паза 210
Полости 27 и 28 пневмоцилиндра 14 соединяются с сетью 29 сжатого воздуха через электропневмозолот- ники 30 и 31 каналами 32э 33, 34 и 35, 36, 37, Сечения каналов попарно равны: 32 и 35, 34 и 36, 33 и 37. Полости 27 и 28 пневмоцилиндра перед поршнями 16, 17 имеют для подвода воздуха каждая по два канала разных поперечных сечений: 34,,и 37, 33 и 36. Они выполнены так, что канал большего сечения одной полости и меньшего сечения другой полости соединены в один и включены в воздушную сеть элек- тропневмозолотниками 30 и 31.
Поперечные сечения каналов 33 и 37 подобраны таким образом, что
последовательном поступлении из них воздуха от сети в полости 28 или 27 и выхода его через каналы 36 и 34 в полостях создает подпор, достаточный для преодоления усилия сжатия пружины 26.
Площадь поперечного сечения большего канала 34 или 36 превышает сумму двух площадей поперечных сечений ,меньших каналов 33 и 37 из условия создания необходимого подпора для преодоления усилия сжатия пружи- , ны 26 и совместного перемещения поршней 16 и 17. Сечения каналов 32 и 35 выполнены равным соответственно сумме сечений каналов 33, 34 и 36, 37„
Электропневмозолотники 30 и 31 соединены через реле времени (не показаны) с датчиками 38 и 39 позиций бункера 6 и срабатывают от этих датчиков по истечении промежутка времени, заданного реле времени. Датчики 38 и 39 установлены на кронштейнах 40 и 41, закрепленных на платформе 4, фиксируют конечные положения поворота бункера 6 через флажок 42, закрепленный на шкиве 23.
Устройство работает следующим образом.
В исходном состоянии устройства, в неподвижный бункер 6, когда одна их установленных кассет 7 находится в нижнем положении, засыпаются детали. При подаче напряжения срабатывает один из датчиков 38 или 39, включающий вибропривод и реле временно Под действием силы тяжести и вибрации детали западают в кассету 70 Реле времени, настроенное на некоторый промежуток времени, выключается и подает команду на включение одного из электропневмозолотников 30 или 31 и выключение вибратора 2.
При срабатывании электропневмо- золотника 31 из сети 29 воздух поступает в канал 32, далее из него в каналы 33 и 34 и одновременно в полости 27 и 28. Поступивший в полость 28 из канала 33 воздух выходит,не за- держиваясь в полости 28, по каналу 36 и далее по каналу 35, выключенный электропневмозолотник 30 в атмосферу. При этом создается подпор в полости 28 и его усилие больше усилия сжатия пружины 26.
Воздух, поступивший в полость 27 по каналу 34, частично по каналам 37 затем 35 и через выключен0
5
0
5
ный электропневмозолотник 30 поступает в атмосферу. Большая часть воз- духа за счет того, что сечение канала 34 больше суммы сечений двух каналов 33 и 37, воздействует на поршень 16, перемещая последний. При этом вследствие подпора в полости 28 большего, чем усилие пружины 26, поршень 17 стоит на месте. Перемещающийся поршень 16 воздействует на пружину 26, сжимает ее до соприкосновения обоих поршней 16 и 17. С того момента оба поршня 16 и 17 со штоками 18 и 19 перемещаются вместе вниз, как одно целое, поскольку подвергаются постоянному воздействию усилия от воздуха, поступающего по каналу 34, поперечное сечение которого превышает сумму сечений каналов 37, 33 на величину, достаточную для создания усилия, необходимого для поворота шкива 23 бункера 6. Перемещаясь, шток 18 воздействует на конец ветви 22, закрепленный на шкиве 23, поворачивает бункер 6 на угол 180° до срабатывания датчика 39 от флажка 42.
В начале поворота бункера 6 детали под воздействием силы тяжести и вибрации, запавшие в ячейки кассеты 7, фиксируются отсекателями 9, работающими от кулачкового механизма 12, а остальные высыпаются обратно в бункер 6 в верхнем положении кассеты 7 о На место поднятой кассеты 7 с зафиксированными деталями устанавливается новая кассета 7, на поверхности которой насыпаны детали, с расфик- сированным отсекателем 9 Поворот бункера 6 осуществляется с высокой скоростью.
После срабатывания датчика 39 включается вибратор 2 и реле времени (не показано) выключает электропневмо- ,золотник 31, прекращается подача воздуха из сети 29 в каналы 32 - 34, освобождая поршни 16 и 17 от воздействий усилий воздуха. Под воздействием пружины 26 поршни 16 и 17 перемещаются до упора в штифт 20 (фиг.5), обе ветви гибкого элемента 22 ослабевают, освобождая от нагрузки шкив. 23 и ось 5 бункера 6, снимается асимметричная нагрузка, возникшая при повороте бункера с верхней плиты вибро- прнвода, и создаются оптимальные условия для перемещения набираемых из- iделий в кассету 7, находящуюся в ниж0
0
5
0
5
1 1
ем положении,ориентированию их и за- оданию в гнезда 7„ Перемещение,оринтация и эападение изделии 8 существляется под воздействием олебательных движений вибратора, свобожденного от действия усилия соответствующего привода при неподвижной кассете, находящейся внизу в горизонтальном положении
После некоторого кратковременного промежутка времени срабатывает репе времени (не показано), выключается вибратор 2 и реле времени включает электропневмозолотник 30„
При срабатывании электропневмозо- лотника 30 воздух из сети 29 поступает в какал 35, далее з него по каналам 36 и 37 в полости 28 и 27„ Поступивший в полость 27 из канала 37 воздух выходит, ке задерживаясь, по каналам 34 и 32, выключенный злектро- пневмозолотник 31 в атмосферу. При этом создается подпор в полости 27, усилие которого больше усилия сжатия пружины 26, Воздух, постутивший в полость 28 по каналу 365 частично по каналам 33 и 32, злектропнввмо- золотник 31 выходит в атмосферу „Бол ,.- шая же часть воздуха, поступившая по каналу 36, воздействуе™ на поршень 17, перемещая последний вверх. Через шток 19 перемещение передается гибкому элементу 22, который, будучи переброшен через шкив М и закреплен ный на шкиву 23 s проворачивает шкив 23 и вместе с ник Яункер 6 в противоположную сторону„ При этом размыкается датчик 39. выключается вибратор 2, детали под воздействием силы
1П
374548
тяжести и вибрации, запавшие в ячейки кассеты 7, правильно сориентированные, фиксируются в кассете 7 от- секателем 9, через кулачковый меха- 5 низм 12, а остальные высыпаются в бункер 6 в верхнем положении кассе- ть 1, Поворот происходит до срабатывания датчика 38 от флажка 42„
Датчик 38 дает сигнал на выключение электропневмозолотника 30, вклю- (чение вибратора 2 и реле времени (не показано). Далее цикл работы повторяется.
Формула изобретения
Устройство для групповой загрузки деталейэ содержащее основание, закрепленный не нем вибропривод с платформой, шарнирнс установленный в ней .бункер с многоместными кассетами,соединенный посредством гибкого элемента и шкива, размещенного на оси бун25 кера, с соответствующим приводом,
отличающееся тем, что, с целью повышения производительности, бункер установлен с возможностью колебательного движения вокруг своей
-Q оси с останоззом в крайних точках, при этом соответствуюший привод выполнен в виде пневмоцилиндра с двумя подпружиненными относительно друг друга поршнями со штоками, оппозит- но расположенными с возможностью возвратно-поступательного перемещения и соединенными с соответствующими концами гибкого элемента, жестко соединенного со шкивом и огибающего вве- п дечный в устройство закрепленный на основании направляющий шкив.
20
35
f
l
o CS o.
Na
ФигМ
36
Фиг. 5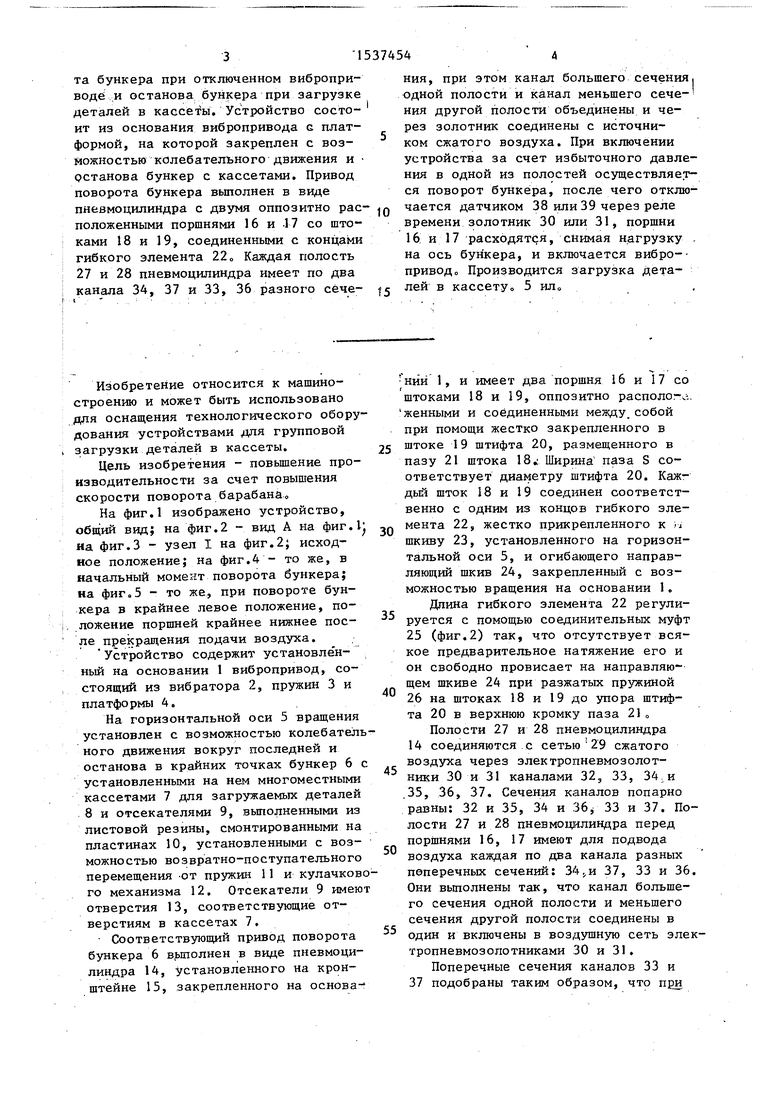
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для монтажа радиодеталей на печатную плату | 1985 |
|
SU1412027A1 |
| Устройство для ориентации и загрузки деталей в гнезда кассеты | 1987 |
|
SU1436158A1 |
| Устройство для подачи заготовок | 1981 |
|
SU961923A2 |
| Устройство для подачи заготовок | 1985 |
|
SU1220717A2 |
| Однопозиционный формовочный автомат | 1983 |
|
SU1210959A1 |
| Устройство для ориентации и загрузки в кассеты разрезных ,упругих, трубчатых изделий | 1986 |
|
SU1466026A1 |
| Пресс для вырубания обувных деталей из листового материала | 1986 |
|
SU1463215A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1986 |
|
SU1342537A1 |
| Однопозиционный формовочный автомат | 1987 |
|
SU1424944A1 |
| Устройство управления дозатором | 1986 |
|
SU1357721A1 |
Изобретение относится к машиностроению и может быть использовано при загрузке изделий в кассеты. Цель изобретения - повышение производительности за счет ускорения поворота бункера при отключенном виброприводе и останова бункера при загрузке деталей в кассеты. Устройство состоит из основания вибропривода с платформой, на которой закреплен с возможностью колебательного движения и останова бункер с кассетами. Привод поворота бункера выполнен в виде пневмоцилиндра с двумя опозитно расположенными поршнями 16 и 17 со штоками 18 и 19, соединенными с концами гибкого элемента 22. Каждая полость 27 и 28 пневмоцилиндра имеет по два канала 34, 37 и 33, 36 разного сечения, при этом канал большего сечения одной полости и канал меньшего сечения другой полости объединены и через золотник соединены с источником сжатого воздуха. При включении устройства за счет избыточного давления в одной из полостей осуществляется поворот бункера, после чего отключается датчиком 28 или 29 через реле времени золотник 30 или 31, поршни 16 и 17 расходятся, снимая нагрузку на ось бункера, и включается вибропривод. Производится загрузка деталей в кассету. 5 ил.
| Устройство для групповой загрузки деталей | 1973 |
|
SU450699A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
