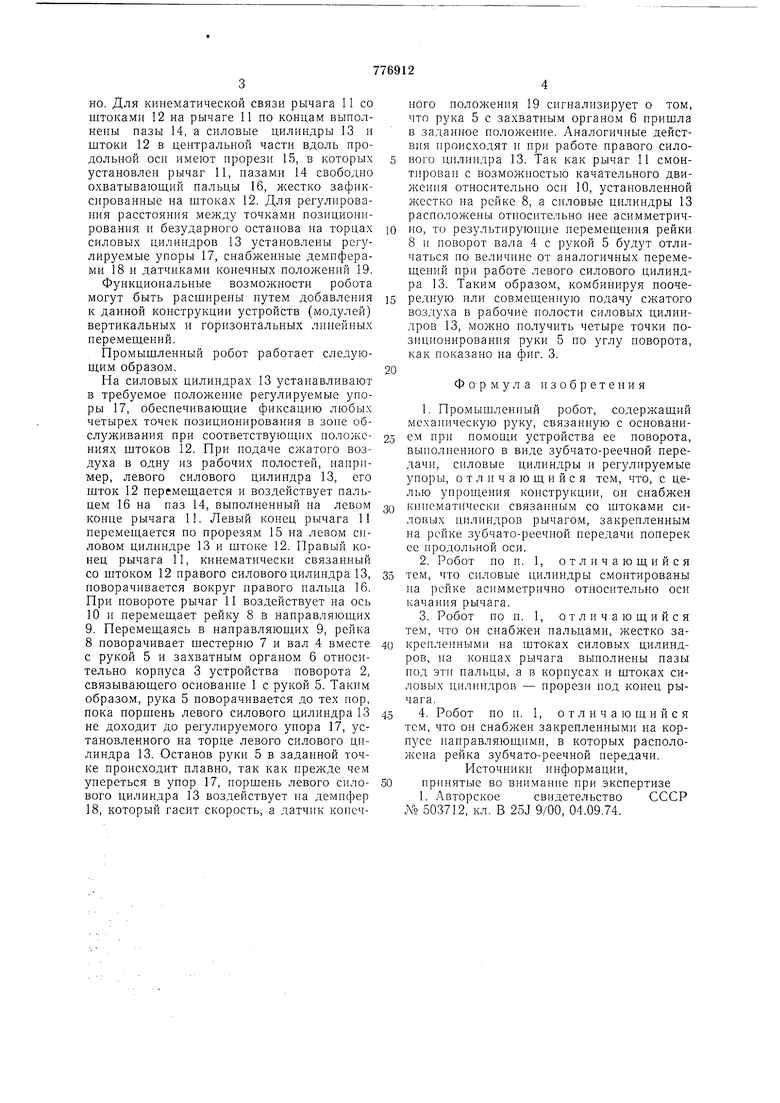
но. Для кинематической связи рычага 11 со штоками 12 на рычаге 11 по концам выполнены пазы 14, а силовые цилиндры 13 и штоки 12 в центральной части вдоль продольной оси имеют ирорези 15, в которых установлен рычаг 11, пазами 14 свободно охватываюш ий пальцы 16, жестко зафиксированные на штоках 12. Для регулирования расстояния между точками позиционирования и безударного останова на торцах силовых цилиндров 13 установлены регулируемые упоры 17, снабженные демпферами 18 и датчиками конечных положений 19.
Функциональные возможности робота могут быть расширены путем добавления к данной конструкции устройств (модулей) вертикальных и горизонтальных линейных неремещений.
Промышленный робот работает следующим образом.
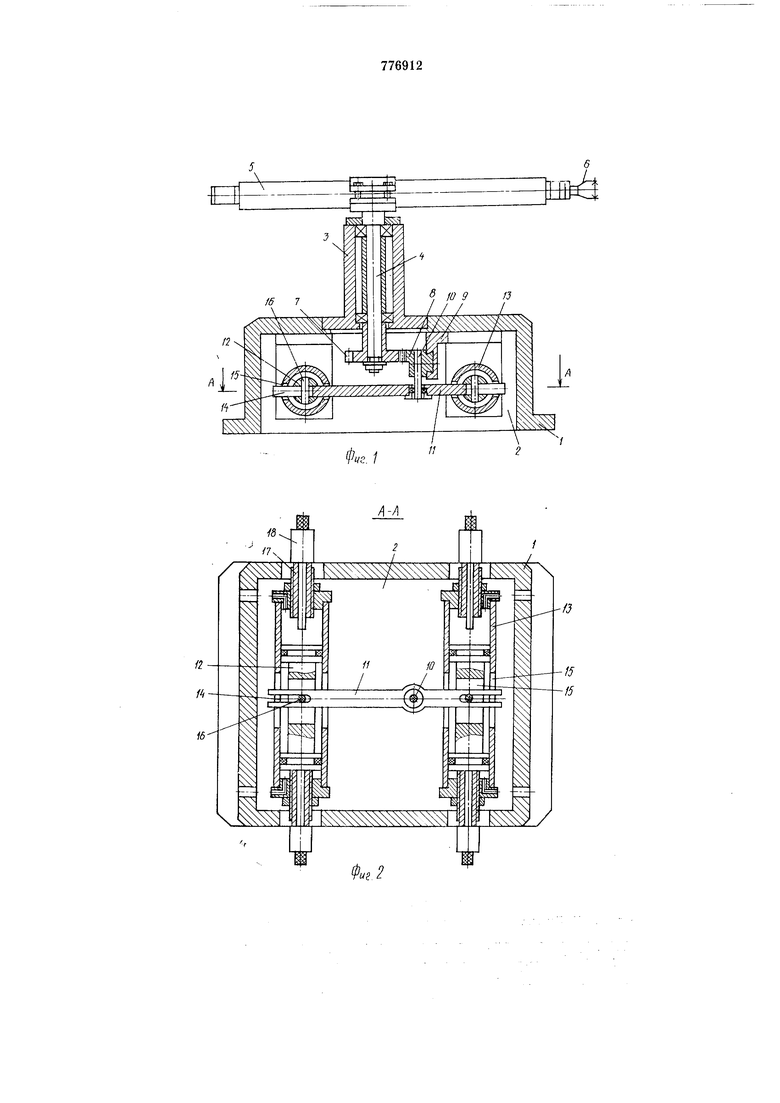
На силовых цилиндрах 13 устанавливают в требуемое положение регулируемые упоры 17, обеспечивающие фиксацию любых четырех точек позиционирования в зоне обслуживания при соответству оших положениях штоков 12. При подаче сжатого воздуха Б одну из рабочих полостей, например, левого силового цилиндра 13, его шток 12 перемещается и воздействует пальцем 16 на паз 14, выполненный на левом конце рычага 11. Левый конец рычага 11 перемещается по прорезям 15 на левом силовом цилиндре 13 н штоке 12. Правый конец рычага 11, кинематически связанный со штоком 12 нравого силового цилиндра 13, поворачивается вокруг нравого пальца 16. При повороте рычаг 11 воздействует на ось 10 и перемещает рейку 8 в направляющих 9. Перемещаясь в направляющих 9, рейка 8 поворачивает шестерню 7 и вал 4 вместе с рукой 5 и захватным органом 6 относительно корпуса 3 устройства поворота 2, связывающего основание 1 с рукой 5. Таким образом, рука 5 поворачивается до тех пор, пока порщень левого силового цилиндра 13 не доходит до регулируемого упора 17, установленного на торце левого силового цилиндра 13. Останов руки 5 в заданной точке происходит плавно, так как прежде чем упереться в упор 17, поршепь левого силового цилиндра 13 воздействует на демпфер 18, который гасит скорость, а датчик конечного ноложения 19 сигнализирует о том, что рука 5 с захватным органом 6 пришла в заданное положение. Аналогичные действия происходят и при работе правого силового цилиндра 13. Так как рычаг И смонтирован с возможностью качательного движения относительно оси 10, установленной жестко на рейке 8, а силовые цилиндры 13 расположены относительно нее асимметричпо, то результирующие перемещения рейки 8 и поворот вала 4 с рукой 5 будут отличаться но величине от аналогичных перемещений при работе левого силового цилиндра 13. Таким образом, комбинируя поочередиую или совмещенную подачу сжатого воздуха в рабочие полости силовых цилиндров 13, можно получить четыре точки позиционирования руки 5 по углу поворота, как показано на фиг. 3.
Формула изобретения
1.Промышленный робот, содержащий механическую руку, связанную с основаннем при помощи устройства ее поворота, выполпенного в виде зубчато-реечной передачи, силовые цилиндры и регулируемые упоры, отличающийся тем, что, с целью упрощения конструкции, он снабжен
кинематически связанным со штоками силовых цилиндров рычагом, закреиленным на рейке зубчато-реечной передачи поперек ее продольной оси.
2.Робот по п. 1, отличающийся тем, что силовые цилиндры смонтированы
на рейке асимметрично относительно оси качания рычага.
3.Робот по п. 1, отличающийся тем, что он снабжен пальцами, жестко закрепленными на штоках силовых цилиндров, иа концах рычага выполнены пазы нод эти нальцы, а в корнусах и щтоках силовых цилиндров - прорези под конец рычага.
4. Робот по и. 1, от л и ч а ю щ и и с я тем, что он снабжен закрепленными на корпусе направляющими, в которых расположена рейка зубчато-реечной нередачи. Источники информации,
принятые во внимание прн экспертизе
1. Авторское свидетельство СССР 503712, кл. В 25J 9/00, 04.09.74.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1978 |
|
SU874328A1 |
| Манипулятор | 1978 |
|
SU874330A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Промышленный робот | 1980 |
|
SU965761A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Устройство для подачи заготовок | 1987 |
|
SU1648729A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Захватное устройство | 1984 |
|
SU1199614A1 |
УЗ
rh 2
fve. j
