(54) ПРОМЫШЛЕННЫЙ РОБОТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1974 |
|
SU503712A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1978 |
|
SU874328A1 |
| Рука промышленного робота | 1980 |
|
SU935262A1 |
| Промышленный робот | 1978 |
|
SU776912A1 |
| Манипулятор | 1978 |
|
SU874330A1 |
| Промышленный робот | 1980 |
|
SU876415A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Промышленный робот | 1986 |
|
SU1368166A1 |
| Промышленный робот | 1976 |
|
SU603577A1 |
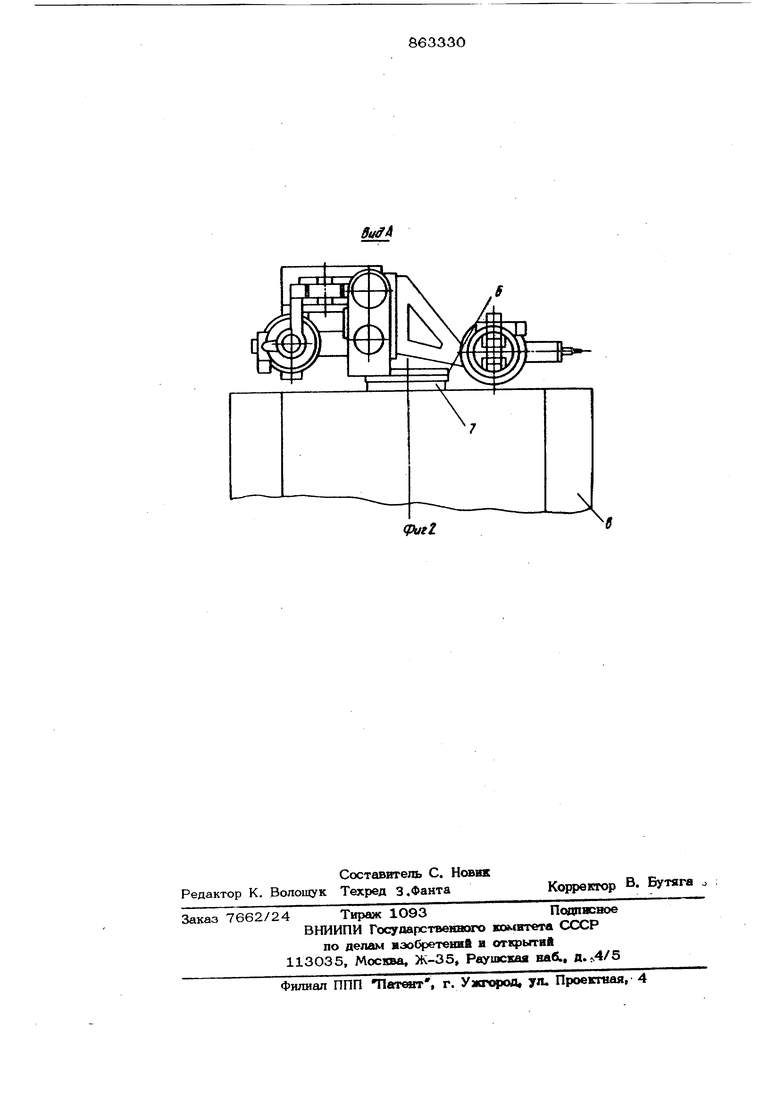
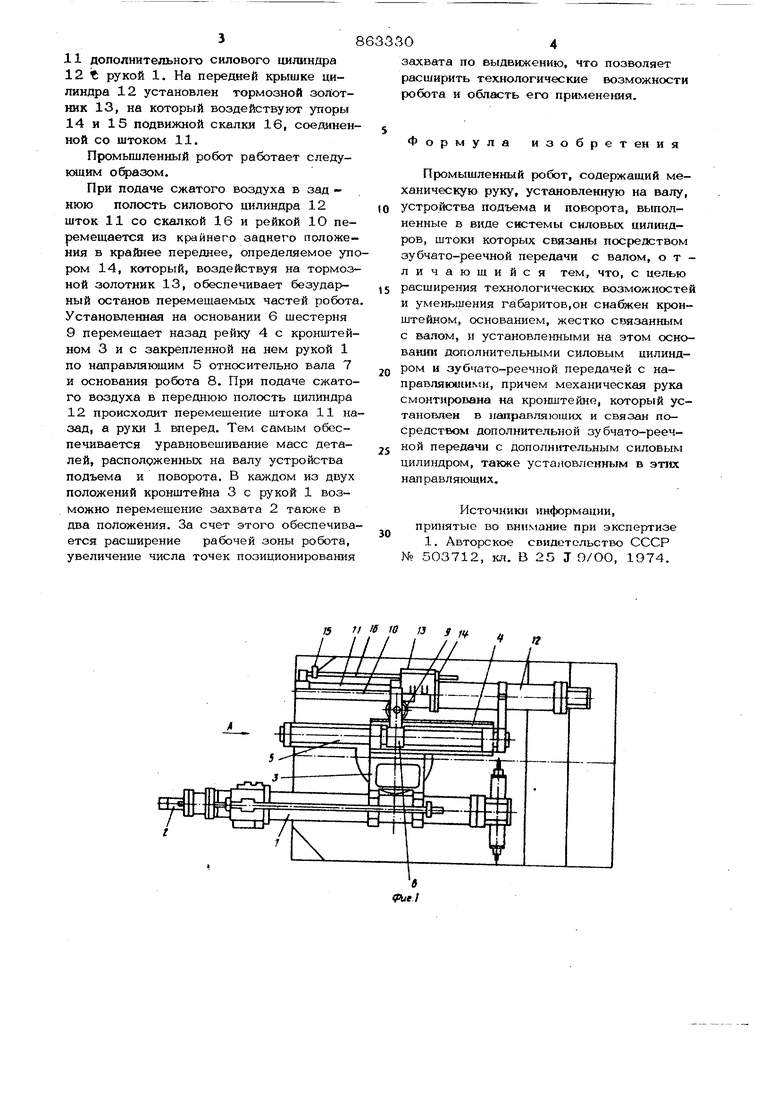
Изобретение относится к машиностроению, а именно к промышленным работам с,цикловым управлением. Известен промышленный робот, содержащий механическую руку, установленную на валу, устройства подъема и поворота, вьшолненные в виде системы силовых цилиндров, штоки которых связаны посредством зубчато-реечной передачи с валом Недостатками этого работа являются большие габариты и малое число точек позиционирования механической руки, что снижает технологические возможности про мышленного робота путем увеличения числа точек позиционирования механичес кой руки по выдвижению и уменьшению габаритов промьш1ленного робота. Цель изобретения - расширение технологических возможностей и уменьшение габаритов. Поставленная цель достигается тем, что промьш1ленный робот снабжен кронштейном, основанием, жестко связанным с валом, и установленными на этом основании дополнительными пневмоиилиндром и зубчато-реечной передачей с направляюшими, причем механическая рука смонтирована на кронштейне, который установлен в направляющих и связан посредством дополнительной зубчато-реечной . передачи с дополнительным силовым цилиндром, также установленным в этих направляющих. На фиг. 1 показан робот, вид сверху; на фиг. 2 - вид А на фиг. 1. Промышленный робот содержит механическую руку 1 с захватом 2, установленную на кронштейне 3, который снабжен зубчатой рейкой 4 и смонтирован на направлнкщих 5, связанных посредством основания 6 с валом 7 устройства подъема и поворота, имеющие основные зуб-: чатр-реечную передачу и силовой цилиндр (не показаны) и расположенные на кор-пусе робота 8. Дополнительная зубчатореечная передача содержит рейку 4, шестерню 9 и рейку 10 и связывает шток 38 11дополнительного силового цилиндра 12f; рукой 1. На передней крышке цилиндра 12 установлен тормозной зоЛотник 13, на который воздействуют упоры 14 и 15 подвижной скалки 16, соединенной со штоком 11. Промышленный робот работает следующим образом. При подаче сжатого воздуха в зад нюю полость силового цилиндра 12 шток 11 со скалкой 16 и рейкой 10 перемещается из крайнего заднего положения в крайнее переднее, определяемое упо ром 14, который, воздействуя на тормозной золотник 13, обеспечивает безударный останов перемещаемых частей робота Установленная на основании 6 шестерня 9 перемещает назад рейку 4 с кронштейном 3 и с закрепленной на нем рукой 1 по направляющим 5 относительно вала 7 и основания робота 8. При подаче сжатого воздуха в переднюю полость цилиндра 12 происходит перемещение штока 11 на зад, а руки 1 вперед. Тем самым обеспечивается уравновешивание масс деталей, расположенных на валу устройства подъема и поворота. В каждом из двух положений кронштейна 3 с рукой 1 возможно перемещение захвата 2 также в два положения. За счет этого обеспечива ется расширение рабочей зоны робота, увеличение числа точек позиционирования 04 ахвата по выдвижению, что позволяет асширить технологические возможности обота и область его применения. Формула изобретения Промышленный робот, содержащий механическую руку, установленную на валу, устройства подъема и поворота, выполненные в виде системы силовых цилиндров, штоки которых связаны посредством зубчато-реечной передачи с валом, отличающийся тем, что, с целью расширения технологических возможностей и уменьщения габаритов,он сна&кен кронштейном, основанием, жестко связанным с валом, и установленными на этом основашш дополнительными силовым цилиндром и зубчато-реечной передачей с напpaвляюutи u, причем механическая рука смонтирована на кронштейне, который установлен в }1аправляюших и связан посредством дополнительной зубчато-реечной передачи с дополнительным силовым цилиндром, также установленным в этих нал равлякмдих. Источнию информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 503712, кл. В 25 J 9/ОО, 1974.
