Ю
ел
tsO
О
О)
вижно на каретке, а другая скреплена неподвижно с тяговым органом и прижимается к неподвижной плите при. помощи поворотного кулачка с рукояткой, имеющего криволинейную опорную поверхность. Автооператор содержит механизм подъема, выполненный в виде двух раздельных кареток 1 с захватами 2, регулировочного приспособления, выполнен- ю ного в виде зубчатой плоской .плиты 3, установленной неподвижно на каретке 1, и съемной плиты 4, соединенной с гиб- КИМ-тяговым органом 5. Барабан 6 для
намотки тягового органа приводится во вращение приводом 7. Каретки движутся вертикально в направляющих 8, имеющих упоры для фиксации кареток. На захваты завешивается подвеска 9 для размещения обрабатываемой детали 10, Для прижатия зубчатой плиты 4 к плите 3 имеется кулачок 11, расположенньш на валу с возможностью вращения с помощь рукоятки. При сжатии плит 3 и 4 или при их разведении фиксация рукоятки производится упорами. 5 ил.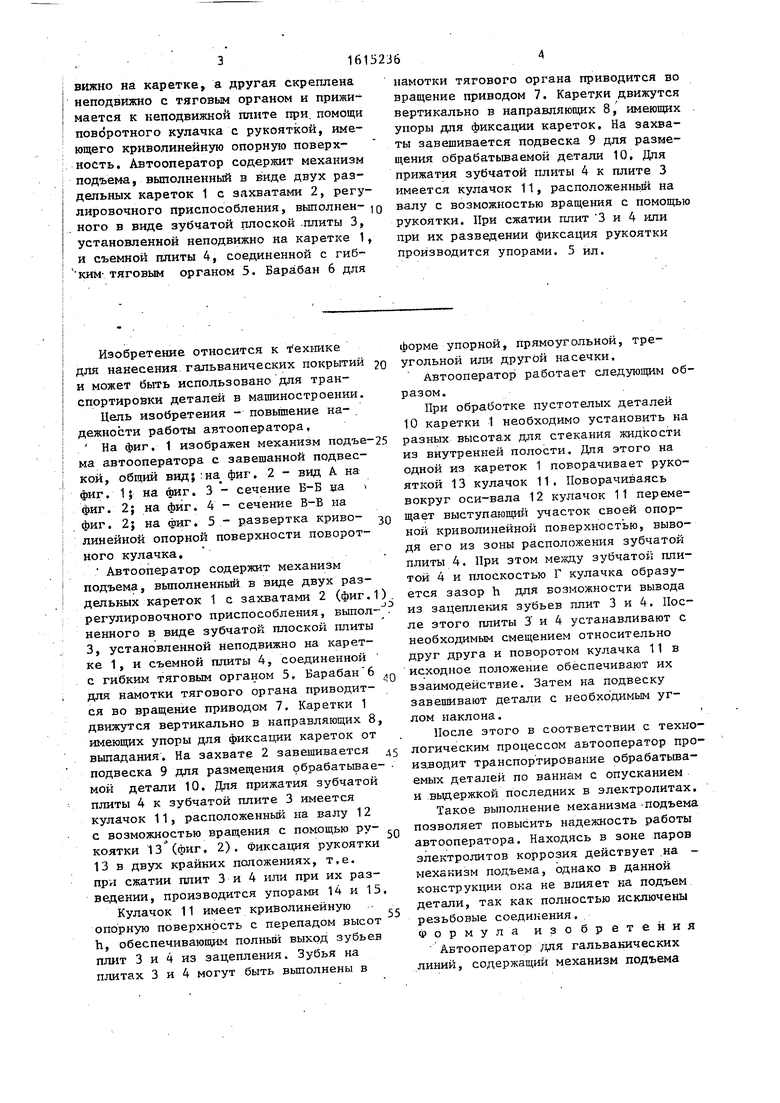
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для гальванических линий | 1980 |
|
SU952704A1 |
| Автооператор для гальванических линий | 1981 |
|
SU947232A1 |
| Устройство для загрузки подвесок подвесного конвейера | 1987 |
|
SU1507695A1 |
| Автоматическая линия для гальванохимической обработки крупногабаритных листовых изделий | 1983 |
|
SU1084342A1 |
| Автооператор | 1980 |
|
SU891328A1 |
| Автооператор | 1969 |
|
SU344701A1 |
| Автооператор для гальваноавтоматов | 1974 |
|
SU522287A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ДЕТАЛИ | 1991 |
|
RU2016370C1 |
| Линия для нанесения гальванопокрытий | 1986 |
|
SU1397552A1 |
| Грузоподъемник погрузчика | 1985 |
|
SU1296507A1 |
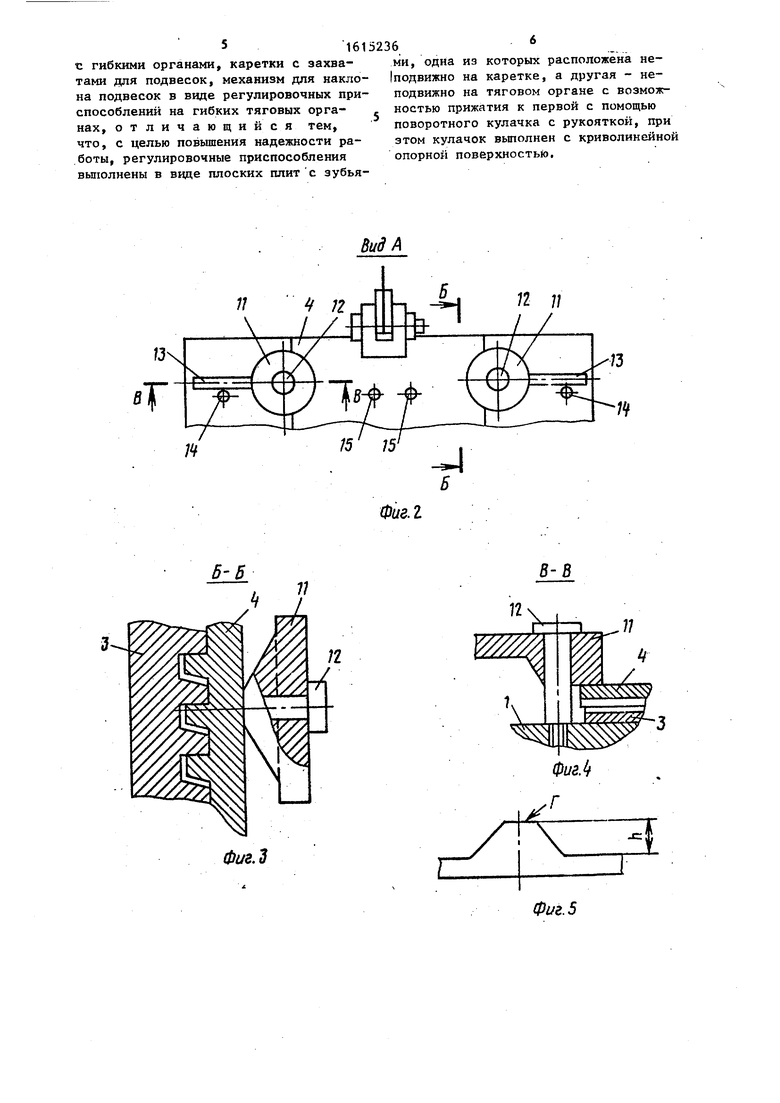
Изобретение относится к технике для нанесения гальванических покрытий, а также может быть использовано для транспортировки деталей в машиностроении. Цель изобретения - повышение надежности автооператора в работе. Для этого регулировочные приспособления подъема и наклона подвесок выполнены в виде двух плоских плит с зубьями, одна из которых закреплена неподвижно на каретке, а другая скреплена неподвижно с тяговым органом и прижимается к неподвижной плите при помощи поворотного кулачка с рукояткой, имеющего криволинейную опорную поверхность. Автооператор содержит механизм подъема, выполненный в виде двух раздельных кареток 1 с захватами 2, регулировочного приспособления, выполненного в виде зубчатой плоской плиты 3, установленной неподвижно на каретке 1, и съемной плиты 4, соединенной с гибким тяговым органом 5. Барабан 6 для намотки тягового органа приводится во вращение приводом 7. Каретки движутся вертикально в направляющих 8, имеющих упоры для фиксации кареток. На захваты завешивается подвеска 9 для размещения обрабатываемой детали 10. Для прижатия зубчатой плиты 4 к плите 3 имеется кулачок 11, расположенный на валу с возможностью вращения с помощью рукоятки. При сжатии плит 3 и 4 или при их разведении фиксация рукоятки производится упорами. 5 ил.
Изобретение относится к технике для нанесения гальванических покрытии 20 и может быть использовано для транспортировки деталей в машиностроении.
Цель изобретения - повьш1ение надежности работы автооператора. На фиг. 1 изображен механизм подъе-25 ма автооператора с завешанной подвеской, общий вид; :на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - сечение В-Б на фиг. 2} на фиг. 5 - развертка криво- зо линейной опорной поверхности поворотного кулачка,
Автооператор содержит механизм подъема, выполненный в виде двух раздельных кареток 1 с захватами 2 (фиг. IK регулировочного приспособления, выпол ненного в виде зубчатой плоской плиты 3, установленной неподвижно на каретке 1 , и съемной плиты 4, соединенной с гибким тяговым органом 5. Барабан 6 Q для намотки тягового органа приводится во вращение приводом 7. Каретки 1 движутся вертикально в направляющих 8, имеющих упоры для фиксации кареток от выпадания. На захвате 2 завешивается 45 подвеска 9 для размещения обрабатьшае- мой детали 10. Для прижатия зубчатой плиты 4 к зубчатой плите 3 имеется кулачок 11, расположенный на валу 12 с возможностью вращения с помощью ру- Q коятки 13(Фиг. 2). Фиксация рукоятки 13 в двух крайних положениях, т.е. при сжатии плит 3 и 4 или при их разведении, производится упорами Н и 1Ь.
Кулачок 11 имеет криволинейную опорную поверхность с перепадом высот h, обеспечивающим полный выход зубьев плит 3 и 4 из зацепления. Зубья на плитах 3 и 4 могут быть вьшолнены в
форме упорной, прямоугольной, треугольной или другой насечки. - Автооператор работает следующим образом.
При обработке пустотелых деталей 10 каретки 1 необходимо установить на разных высотах для стекания жидкости из внутренней полости. Для этого на одной из кареток 1 поворачивает рукояткой 13 кулачок 11. Поворачиваясь вокруг оси-вала 12 кулачок 11 перемещает выступающи участок своей опорной криволинейной поверхностью, выводя его из зоны расположения зубчатой плиты 4. При этом между зубчатой плитой 4 и плоскостью Г кулачка образуется зазор h для возможности вывода из зацепления зубьев плит 3 и 4. После этого плиты 5 и 4 устанавливают с необходимым смещением относительно друг друга и поворотом кулачка 11 в исходное положение обеспечивают их взаимодействие. Затем на подвеску завешивают детали с необходимым углом наклона.
После этого в соответствии с технлогическим процессом автооператор пр иаводит транспортирование обрабатьша емых деталей по ваннам с опусканием и выдержкой последних в электролитах Такое выполнение механизма.подъем позволяет повысить надежность работы автооператора. Находясь в зоне паров электролитов коррозия действует на механизм подъема, однако в данной конструкции ока не влияет на подъем детали, так как полностью исключены резьбовые соединения. Формула изобретения
- АБТОоператор /щя гальванических линий, содержащий механизм подъема
1615236
с гибкими органами, каретки с захватами для подвесок, механизм для наклона подвесок в виде регулировочных приспособлений на гибких тяговых органах, отличающийся тем, что, с целью повышения надежности работы, регулировочные приспособления вьпюлнены в виде плоских плит с зубья6-Б
11
Фиг.З
ми, одна из которых расположена не- |подвижно на каретке, а другая - неподвижно на тяговом органе с возможностью прижатия к первой с помощью поворотного кулачка с рукояткой, при этом кулачок вьшолнен с криволинейной опорной поверхностью.
Вид А
Фив. г
в-в
Фиг.
Г
| Автооператор для гальванических линий | 1980 |
|
SU952704A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
