-.- : -.-1 . : .;. ;
Изобретение относится к аатоМа;тизированным транспортным системам пёриодического. действия и может бь1тъ использовано в системах упрааленйя межоперацирнныМй передачами/ в частнocтИf в поточных станочных лй.нйях.;
Известно позиционная система: программного управления перемещением транспортного механизма, содержащая программирующее устройствоf устройство управления, датчики мес/ оположения, блок сравнения, блок npUSO-r дов 1 .
Наиболее близким техническим решениём к изобретению являемся устройство для управления транспортным мёханизмом, содержащее датчики направления движения, подключенйне k блоку направления движения, первый выход которого соединен с п ервым в.ходом исполнительного блока, при ;ЭТсэм к второму и третьему BxojiaM поЬлёдйего подключены блоки останова,;и блок определения папряения механизма 21.
Недостатками известных устройств являются их сложность и низкая надежность ,-- -ь,и,елью изобретения является повышение нало ности устройства. Это до-стигается тем, что в ус ойство введены формирователи команд разгрузки
и погрузки и датчики наличия груза, причем первые выходы первых датчиков
S наличия груза и выходы вторых подключены к первым входам формирователей команд разгрузки и погрузки состветственно, вторые входы которых подключены к первым выходам друг друга, а выходы - к входам блоков останова, третий вход формирователя команд разгрузки соединен с вторым вы:ходом блока направления движения, а третий вход формирователя команд погрузки через блок определения положения механизма - с вторыми выходами . первых датчиков наличия груза.
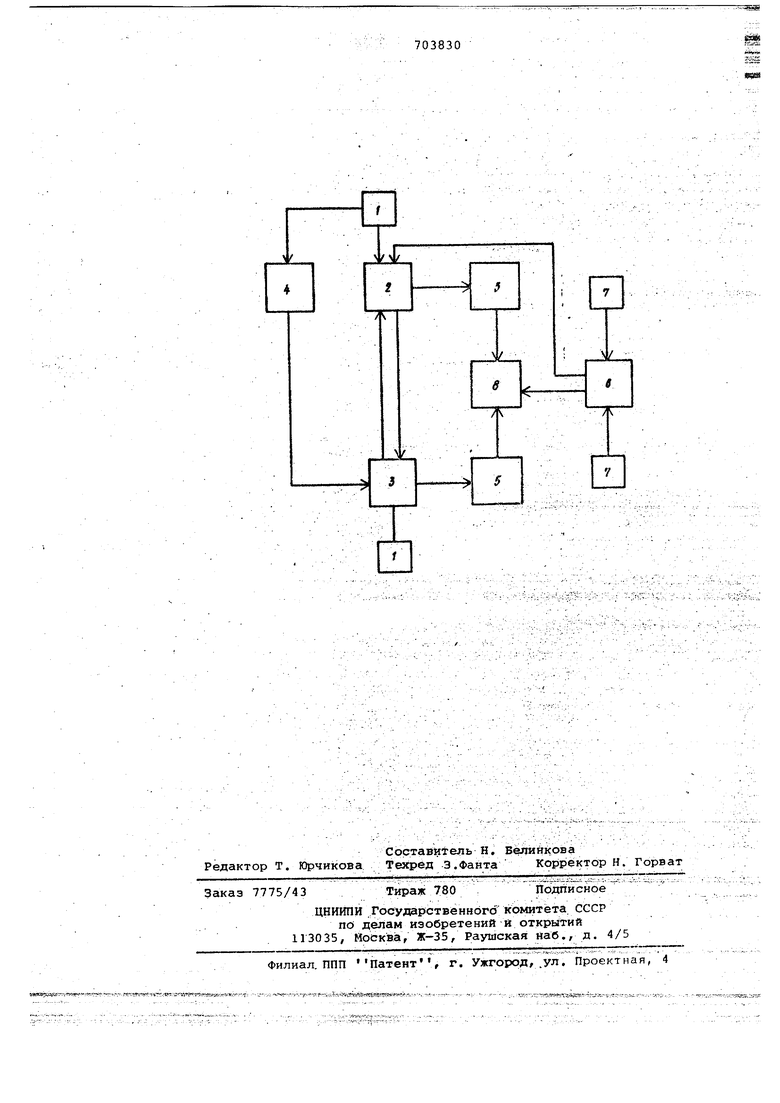
На чертежеИзображена блок-схема устройства, содержащая датчики 1 наличия груза иа приемных и отправительных станциях, установленных, например, у каждого старика поточной линии, формироватёлй команд разгрузки 2 и погрузки 3, блок 4 определения положения механизма, блоки останова 5, блок направления движения 6, датчики 7 направления движения, установЛенные в начале и конце трассы перемещения транспортного механизма, и
0 исполнительный блок 8. Входы v .i формирователей 2 и 3 соединены между собой посредством штепселъных раэ-ь ембё. Устройство работает следующим образом. Т анспортнай механизм перёмещ етСЯ от начала к концу линии и обратно, выполйяя впроцесседбиженйй1 каждом направлений отдельные погруэбчно-разгрузочныв операций, предусмотренные транспортно-теХйолоГичёскоЙ схемой передачи грузов, вне зависимосгтиот их технологической очёред HOjETH. Реверс трайспортного механизма производится и .начале и конце Линии блоками б и 8 по команда « датчиг ков 7, При наличии груза на отправиЭ-еЛьной СФанции и отсутствии груза на при емной станции, связанных оДной погру зочно-разг узрчной операцией, ёйНблняемой в йайравлеяии перемэщения тра спортного устройства, сигналы от бло ка б и от датчиков 1 поступают йа, входы соответсУтвующего формирователя 2, где фо мйруется,команда йафполнейие разгрузочной операции, которая через блок 5 преобразуется ц сигнал на останой незагруженного транспортного механизма при ег подходе к дан ной отправительнои станций. При снятии транспортным механизмо груза с отпраёительной станции по сигналу датчика 1 в последовательно соединенныхблоках 4, 3 и 5 формируется Команда на останов т анст1о|) Механизма При его подходе с к той приемной станции, на кото |JVi6 аолжен бытьустановлен груз со 1 ласно данной погрузочно-разгрузочной операции. Команды, выдаваеше блоками 5 поступают на вход исполнительного блока 8, где формируются В сигналы, управляющие приводами перемещения транспортного механизма- Автс}матйчёское включение транспор ftoro ьех&нйзма производится при необ ходимости выполйени хотя бы одной , погрузЪчйО-раэгрузочйой операции (на личие вызова) . При отсутствий вызова транспортный механизм останавливаетс
л-- в случае переналадки поточной линии на новую технологическую схему обработки, требующую набора другой програм1уи адресования, переналадка устройства производится простым переклйчением штепсельных разъемов формирователей 2 и 3. Использование описанного устройства дает возможность исключить участие 4елЬВека в погрузочно-раз-грузочных: Вп рациях транспортного механизма, а простота Принципа адресования повышает надежность работы устройства. i 1 Формула изобретения Устройство для управления транспортйьй механизмом, содержащее датчики 1Гап авлейия движения, подключенные ft ёлоку нА авления движения, первый йыход которого соединен с первым входом йспоЛниЧелыГого блока, к второму и третьему входам которого подключены блоки оста нов а, и блок определения пЪложения механизма, отличающее с и тем, что, тс тцелью повышений надежности устройства, в него введены формирователи команд разгрузки и Погрузкии датчики груза, причем первйе выходы Первых датчиков йаличия груза и выходи В:Рорь1Х ПодключенУ к первым входам фopмиt)oвaтeлeй команд раз1рузки и погрузки соответственно , входы которых подключены к первы выходам Друг друга, а выходвд - к вЗсбдам блоков останова, третий вход ф|; рмиррватеЛ:я команд разгрузки соединен с вторым выходом блока нап| авленйя движения, а третий вход формирбвателя команд погрузки через блок определения Положения механизма с вторыми висодами первых датчиков н&личиЯ груза. Источни1си информации, прйнятйе во внимание при экспертизе 1.Айторское свидетельство СССР 480083, Кл.С; Об F 15/50, 1975. 2.АВТбрбкЬе Свидетельство СССР № 360666, кл.С Об Р 15/50, 1972 (прототип) 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования транспортных средств | 1987 |
|
SU1432560A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2092423C1 |
| Устройство для автоматического управленияшТАбЕлЕРОМ | 1978 |
|
SU819811A2 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| УСТРОЙСТВО ДШ УПР^СРБЩСтеАМИТРАНСПОРТНЫМИ | 1971 |
|
SU433493A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для управления распределительно-сборочным конвейером | 1977 |
|
SU737324A1 |
| Система автоматического адресования в процессе сортировки | 1988 |
|
SU1533772A1 |
| Устройство для управления транспортным средством | 1987 |
|
SU1429130A1 |
| Устройство для управления напольными транспортными установками | 1974 |
|
SU503776A1 |
tfff-Ufr r n J -J
й«в8йвЙ« -- « -й
