Изобретение относится к непрерывному транспорту, а именно к перегрузочным устройствам для штучных грузов, и преимущественно предназначено для использования при загрузке вагонов и других транспортных средств тучными грузамиЦель изобретения - обеспечение надежной ориентированной передачи штучных грузов на приемный конвейер при го расположении с подающим конвейером как в продольной, так и попереч- йой плоскостях.
t
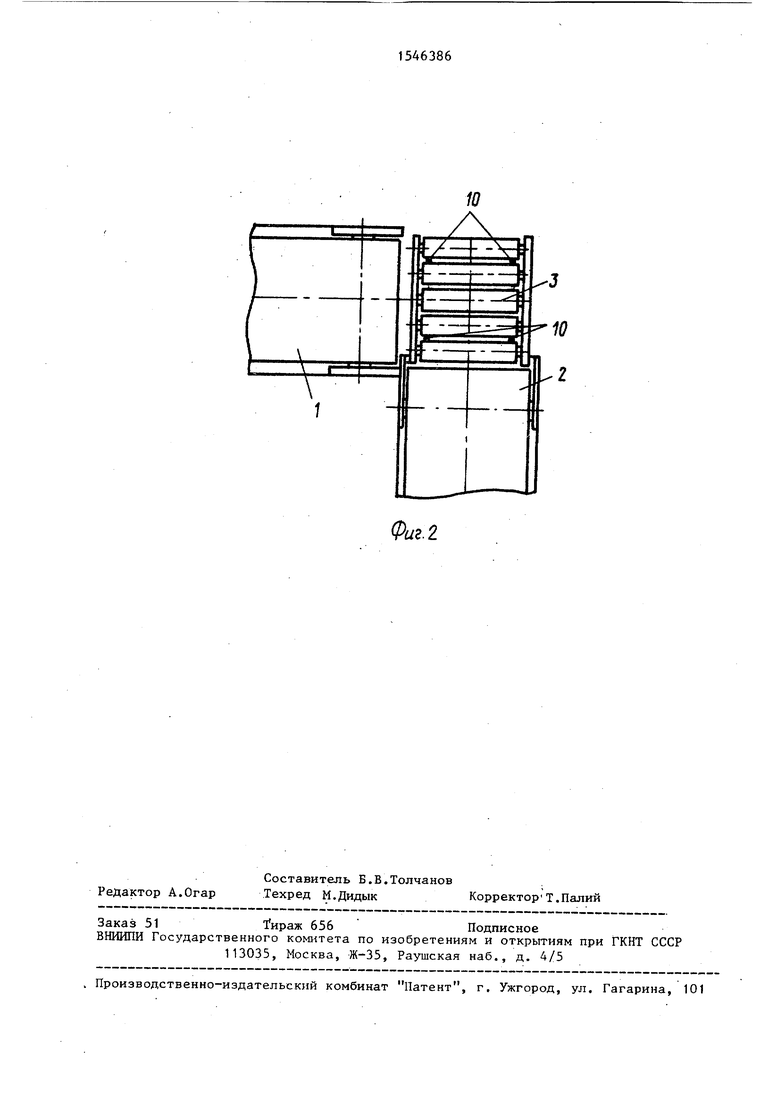
На фиг.1 изображено устройство для перемещения и передачи шту-шых грузов, общий вид, при последователь- нем расположении подающего и приемног Конвейеров; на фиг.2 - то же, при перпендикулярном расположении подающего rt приемного конвейеров.
Устройство состоит из подающего к|онвейера 1, поворотного на верти- альной оси относительно подающего Конвейера 1 приемного конвейера 2, На котором установлен передающий ропь ганговый участок 3 с приводом от фрик- ujHOHHoro ролика 4, осуществляющего мощности от отклоняющего барабана 5 через гибкую связь 6 к грузе- несущим элементам (роликгш) передающего рольгангового участка 3. Фрик- ЕИОННЫЙ ролик 4 устанавливается на передающем участке 3 на качающемся рычаге 7 и прижимается к отклоняюще- ку барабану электромагнитом 8., s раз- мьпсается пружиной 9 после отключения Электромагнита при передаче груза, иногда последний сойдет с передающего рольгангового участка 3 и отпустит Кнопки датчика, состоящего из концевых выключателей 10, установленных Попарно на входе и выходе участла 3. Рольганговый участок 3 установлен на Приемном конвейере через кронштейн 11. Вертикальная ось поворота конвейера 2 расположена по оси симметрии передающего участка 3.
Устройство работает следующим образом.
Штучный груз поступает с подающего конвейера 1 на рольганговый учас- toK 3, установленный на поворотном приемном конвейере 2, замыкая первую пару концевых выключателей, что свидетельствует о правильности поступления груза на рольганговый участок, и при дальнейшем движении по отключенному рольганговому участку замы
Q „ с
0
5
5
кает вторую пару концевых выключателей 10, что свидетельствует о нахождении груза всей опорной плоскостью на передающем рольганговом участке 3, после чего замыкается цепь электромагнита 8, который поворачивает качающийся рычаг 7, прижимая фрикционный ролик 4 с барабану 5. Вращение от фрикционного ролика 4 передается гру- зонесущим элементам (роликам) передающего участка 3, которые отводят груз на приемный конвейер 2, при этом только при отпускании всех четырех концевых выключателей 10, что свидетельствует о полком поступлении груза на приемный конвейер, разрывается цепь электромагнита 8 и пружина 9 отводит фрикционный ролик 4 от барабана 5 качающимся рычагом 7. Формула изобретения
1.Устройство для перемещения и передачи штучных грузов, включающее подающий конвейер, приемный конвейер и установленный на последнем между подающим и приемным конвейером передающий участок с фрикционным роликом
(отбора мощности от приемного конвейера,, кинематически связанным с грузо- несущими элементами передающего участка, отличающееся тем, что, с целью обеспечения надежной ориентированной передачи штучных грузов на приемный конвейер при его расположении с подающим конвейером как в продольной, так и поперечной плоскостях, оно снабжено электромагнитом для прижима фрикционного ролика к приемному конвейеру и датчиком управления электромагнитом, установленным на передающем участке, грузонесущие элементы которого выполнены в виде роликов, при этом приемный конвейер установлен посредством вертикальной оси с возможностью поворота в горизонтальной плоскости, причем вертикальная ось расположена на оси симметрии передающего участка.
2.Устройство по п.1, отличающееся тем, что фрикционный ролик установлен на передающем участке посредством рычага, соединенного с электромагнитом.
3.Устройство по п.1, отличающееся тем, что датчик управления электромагнитом выполнен в виде попарно установленных на входе и выходе передающего участка двух пар концевых выключателей.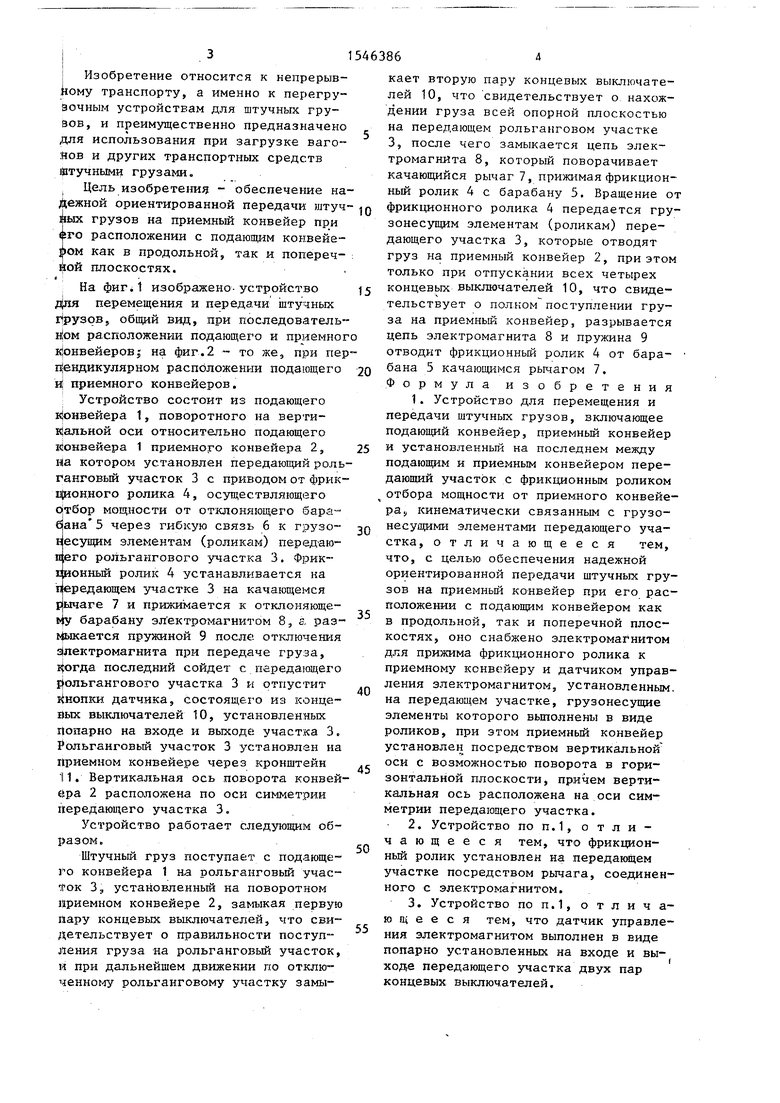
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальная конвейерная система для штучных грузов | 1985 |
|
SU1680599A1 |
| Механизированный накопитель для штучных грузов | 1984 |
|
SU1216085A1 |
| Транспортное средство для перевозки штучных грузов | 1977 |
|
SU695867A1 |
| Тележка для перевозки штучных грузов | 1976 |
|
SU592651A1 |
| Распределительная приводная секция | 1991 |
|
SU1799817A1 |
| Устройство для транспортирования штучных изделий | 1980 |
|
SU925806A1 |
| Устройство для передачи штучных грузов | 1982 |
|
SU1049381A1 |
| Погрузо разгрузочная машина | 1981 |
|
SU1044571A1 |
| Вертикальный конвейер | 1984 |
|
SU1174351A1 |
| ВЕРТИКАЛЬНАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 1995 |
|
RU2083454C1 |
Изобретение относится к непрерывному транспорту и позволяет обеспечить надежную ориентированную передачу штучных грузов на приемный конвейер при его расположении с подающим конвейером как в продольной, так и поперечной плоскостях. Устройство содержит подающий конвейер (К) 1, приемный К 2 и установленный на последнем передающий участок (ПУ) 3 с фрикционным роликом (ФР) 4 отбора мощности от К 2, кинематически связанным через гибкую связь 6 с грузонесущими элементами ПУ 3. При этом ФР 4 установлен на ПУ 3 через качающийся рычаг 7 и имеет соединенный с последним электромагнит 8 прижима ФР 4 и К 2. Грузонесущие элементы ПУ 3 выполнены в виде роликов. На ПУ 3 установлен датчик управления электромагнитом 8, выполненный в виде расположенных на входе и выходе ПУ 3 концевых выключателей 10. При этом К 2 установлен на вертикальной оси с возможностью поворота в горизонтальной плоскости. Вертикальная ось поворота К 2 совпадает с осью симметрии ПУ 3. Штучный груз поступает с К 1 на ПУ 3, который может располагаться с К 1 вдоль или поперек к К 1. При нажатии груза на все выключатели 10 включается электромагнит 8, который поворачивает рычаг 7 и прижимает ФР 4 к К 2. С ПУ 3 груз передается на К 2 з.п. ф-лы, 2 ил.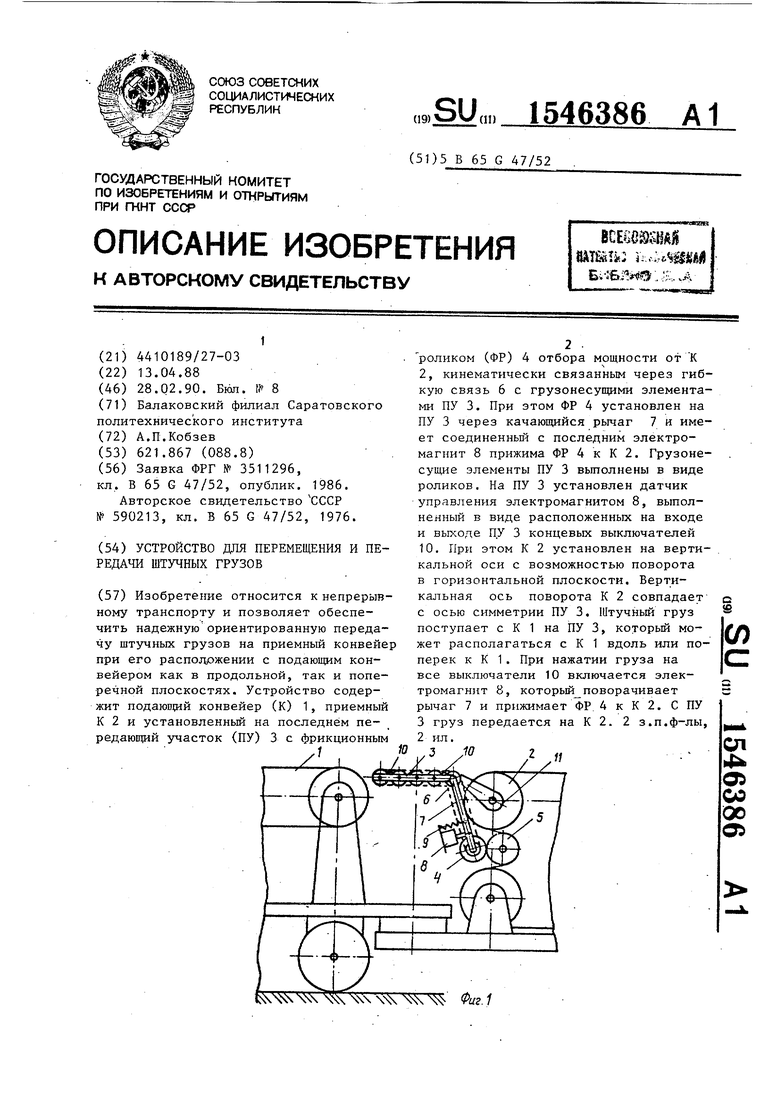
Фиг. 2
| Заявка ФРГ № 3511296, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Устройство для передачи грузов с одного конвейера на другой | 1976 |
|
SU590213A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
