- - u :; , , а ьемно-транс- ,i ji;..,::.;, ;, частности, для
:, спия является упрощение
ч ображено устройство, вид
;. 2 - устройство перед
фрагмент; на фиг. 3 - то же,
грузом; на фиг. 4 - то же,
И зоб;
НОрТИОУ . КОНТСИ:- Це,::
1 ;онстр - И; ;: сбоку захва ;i с захнач
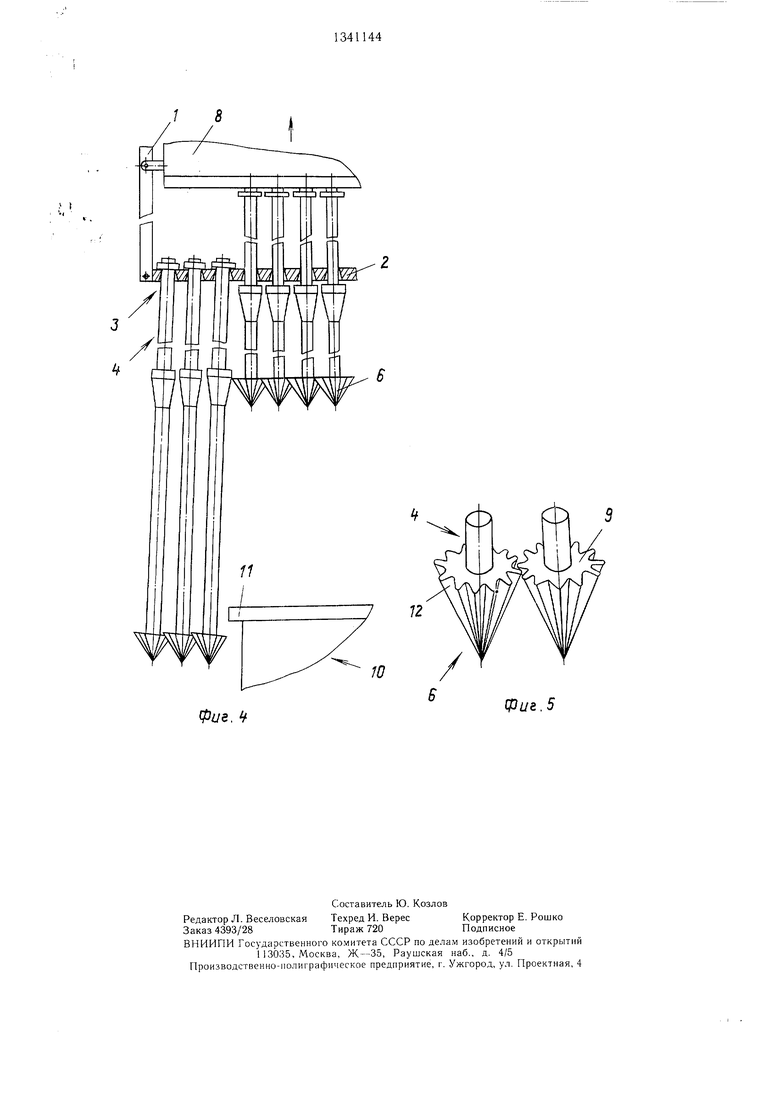
после- осгил юждения груза; на фиг. 5 - в;1аимо. isyioiune между собой зубчатые конусы на нижних концах захватных пальцев.
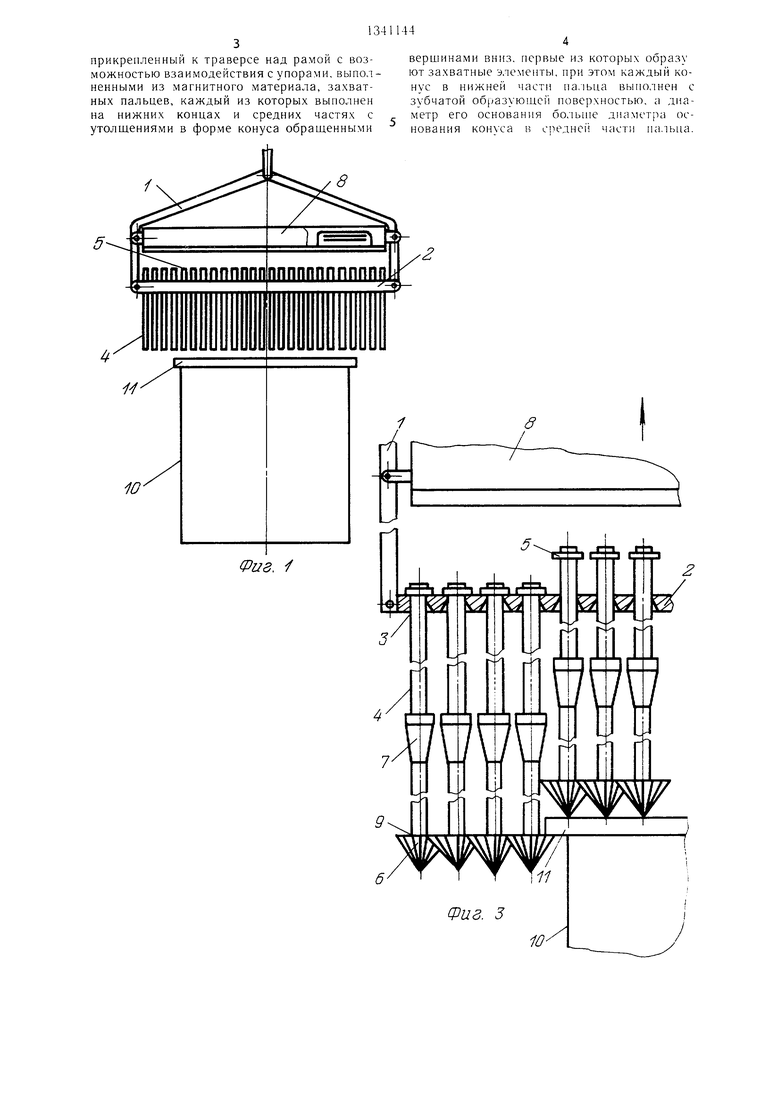
Устройство для захвата груза содержит навешиваемую на крюк грузоподъемного средства (не показан) траверсу 1, под- вен1е 1ную к ней раму 2 с отверстиями 3, установленные в последних захватные пальцы 4, которые ныполнены с упорами 5 на верхних концах и утолщениями 6 и 7 соответственно на нижних концах и в средних частях, и электромагнит 8, прикрепленный к траверсе 1 пад рамой 2. Упоры 5 вы- но. шены из Mai HMTHOi o материала. Утолщения 6 и 7 выполнены в виде конусов вершинами вниз, причем наибольший диаметр конусов 6 бо;1ьше, чем наибольший диаметр конусов 7. Пальцы 4 установлены в отверстиях 3 с возможностью свободного перемещения по вертикали и отклонения от псе. Конусы 6 выполнены с горизонталь- HijiMH новерхностями 9 для захвата груза 10 за кант 11 и снабжены зубьями 12 для более плотного взаимодействия пальцев 4 друг с другом. Поскольку каждый палец 4 взаимодействует одновременно с шестью нальцами,его окружающими, целесообразно, чтобы количество зубьев 12 во всех конусах 6 было одинаковым и кратным щести. Рекомендуется также, чтобы расстояния а, а-2 и Ц;), показанные на фиг. 2, были приблизительно равны между собой.
Устройство работает следующим образом.
Перед захватом груза 10 (фиг. 2) все пальцы 4 параллельны между собой и находятся в нижнем положении, опираясь упорами 5 па раму 2, а зубья 12 находятся в зацеплении.
При опускании устройства пальцы 4, оказавщиеся над грузом 10, упираются в него конусами 6 и останавливаются, а остальные продолжают вместе с рамой 2 движение вниз. При этом пальцы 4, расположенные непосредственно но контуру канта 11, взаимодействуя конусами 6 с последним, отклоняются от вертикали до тех пор, пока их горизонтальные поверхности 9 не окажутся под кантом 11, после чего они опять занимают вертикальное или близкое к нему положение, и опускание устройства нрекра- щают. Такое же движение совершают пальцы 4, расположенные вне контура канта 11, благодаря взаимодействию их между собой посредством конусов 6 и их зубьев 12.
0
5
0
5
0
5
0
При подъеме устройства пальцы 4, расположенные как вне контура канта И, так и непосредственно по его контуру, поднимаются вместе с рамой 2, причем последние, взаимодействуя поверхностью 9 е нижней поверхностью канта 11, поднимают груз 10. Надежность захвата груза 10 обеспечивается больщим количеством пальцев 4, охватывающих его по всему контуру.
После перемещения в заданную точку устройство опускается, груз 10 опирается на землю, пальцы 4, расположенные вне контура и по контуру канта 11, опускаются вместе с рамой 2, а остальные остаются неподвижными на грузе. Включается электромагнит. Опускание устройства происходит до тех пор, пока конусы 6 неподвижных пальцев 4 не вступят во взаимодействие с конусами 7 пальцев 4, расположенных по контуру канта И, вследствие чего последние отклоняются от вертикали, а их конусы 6 выйдут из-под канта 11. В это же время вследствие равенства расстояний а,, аг. и а электромагнит 8 вступает во взаимодействие с упорами 5 неподвижных пальцев 4.
При подъеме устройства удерживаемые электромагнитом 8 пальцы 4 продолжают конусами 6 взаимодействовать с конусами 7 пальцев 4, расположенных по контуру канта 11, в результате чего последние сохраняют свое отклоненное от вертикали положение и свободно проходят мимо груза 10, так как их конусы 6 не задевают канта 11. Затем нитапие электромагнита 8 отключают, удерживаемые им пальцы 4 свободно падают до взаимодействия упорами 5 с рамой 2, после чего устройство готово к захвату нового груза.
Применение предлагаемого устройства обеспечивает большую надежн-ость, поскольку его конструкция проста, единственный силовой элемент - электромагнит 8 - может иметь очень малую мощность, так как предназначен только для удержания на весу ненагруженных пальцев 4, а последние работают практически только на растяжение, так как изгибные нагрузки, возникающие при опирании груза 10 на конусы 6, очень малы.
0
5
Формула изобретения
Захватное устройство для грузов с кантом,, содержащее навешиваемую на грузоподъем- ный механизм траверсу, соединенную с ней раму с отверстиями, в которых установлены с воз.можностью перемещения по вертикали и отклонения от нее пальцы с ограничительными упорами на верхних концах, захватные элементы и приспособление для фиксации положения пальцев, отличающееся тем, что, с целью упропкжие конструкции, приспособление для фиксации положения пальцев представляет собой элекромагнит.
прикрепленный к траверсе над рамой с возможностью взаимодействия с упорами, выполненными из магнитного материала, захватных пальцев, каждый из которых выполнен на нижних концах и средних частях с утолщениями в форме конуса обращенными
верщинами вниз, первые из которых образу ют захватные элементы, при этом каждый конус в нижней части na.ibua выполнен с зубчатой образующей поверхностью, а диаметр его основания больп1е диамет ра основания KOHVca н спеднс части пальпа.
10
/ 8
3
фце.
7 72
иг.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов с кантом | 1987 |
|
SU1546405A1 |
| Автоматический захват | 1981 |
|
SU1004241A1 |
| Захватное устройство для грузов с отверстиями | 1983 |
|
SU1119966A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захват-кантователь | 1983 |
|
SU1137056A1 |
| Захват-кантователь | 1989 |
|
SU1794852A1 |
| Захват-кантователь для контейнеров с цапфами | 1989 |
|
SU1664720A1 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Механизм фиксации захватного устройства | 1983 |
|
SU1105439A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
Изобретение относится к подъемно- транспортному оборудованию, в частности для контейнеров. Цель изобретения - повышение надежности путем упрощения конструкции. Устройство для захвата грузов с кантом содержит навешиваемую на грузоподъемное средство траверсу 1, подвешенную к ней раму 2 с отверстиями 3 и установленные в последних с возможностью свободного перемещения по вертикали и отклонения от нее захватные пальцы 4 с упорами 5 на верхних концах. К траверсе 1 прикреплен электромагнит 8, расположенный над рамой 2. Упоры 5 выполнены из магнитного материала, а захватные пальцы 4 - с утолщениями на нижних концах бив средних частях 7 в виде конусов вершинами вниз, причем конусы 6 на нижних концах выполнены зубчатыми, большего диаметра, чем в средних частях, и с горизонтальными поверхностями 9 для взаимодействия с кантом груза. 5 ил. (О со 4 4 4
| Захватное устройство | 1975 |
|
SU726005A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
