ными пазами 15 с вертикальными штифтами 12, закрепленными на ползушках, а ко- пирными пазами взаимодействуют с вертикальными пальцами, закрепленными на ползуне. Рычаги, смонтированные на ползушках, взаимодействуют продольными пазами с горизонтальными штифтами, закрепленными на грейферных линейках, а копирными пазами взаимодействуют с горизонтальными пальцами, закрепленными в ползуне. 4 ил.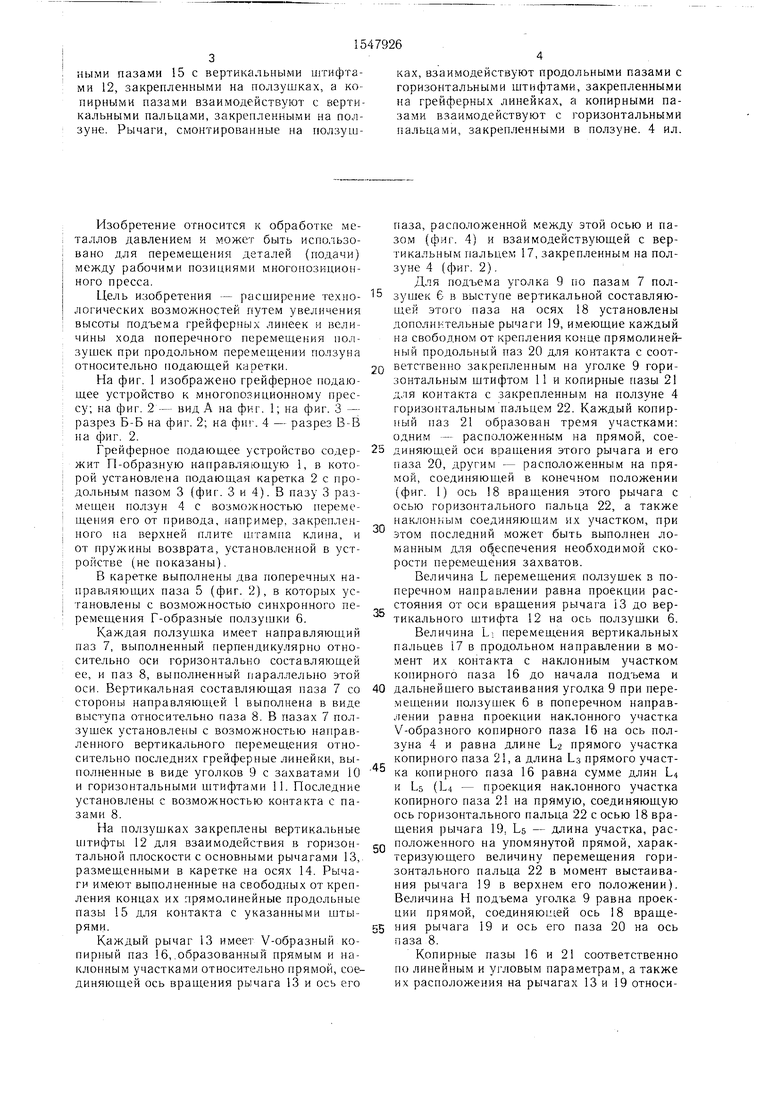
| название | год | авторы | номер документа |
|---|---|---|---|
| Грейферное устройство к штампу | 1985 |
|
SU1359043A1 |
| Грейферное устройство для перемещения заготовок между рабочими позициями многопозиционного пресса | 1986 |
|
SU1484415A1 |
| Устройство для перемещения заготовок в рабочей зоне пресса | 1986 |
|
SU1433593A1 |
| Устройство для грейферной подачи | 1983 |
|
SU1109226A1 |
| Грейферная подача | 1981 |
|
SU963634A1 |
| Устройство для подачи штучных заготовок в рабочую зону пресса | 1989 |
|
SU1706764A1 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
| Грейферное устройство штампа | 1982 |
|
SU1026906A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Грейферное подающее устройство | 1983 |
|
SU1138213A1 |
Изобретение относится к обработке металлов давлением, в частности к устройствам для грейферной подачи заготовок, и может быть использовано для перемещения заготовок между рабочими позициями многопозиционного пресса. Целью изобретения является расширение технологических возможностей путем увеличения ходов перемещения захватов в поперечном и вертикальном направлениях. Заготовка перемещается между рабочими позициями захватами 10, закрепленными на грейферных линейках. Грейферные линейки установлены на подушках 6 с возможностью подъема и расположены симметрично относительно оси подачи. Ползушки смонтированы на подающей каретке с возможностью поперечного перемещения. В подающей каретке установлен ползун 4 с возможностью продольного перемещения. Грейферные линейки и ползушка снабжены механизмами подъема и поперечного перемещения, выполненными в виде рычагов 13. Каждый рычаг 13 имеет выполненные на одном из его концов продольный паз и в средней части копирный паз. Часть рычагов шарнирно закреплена свободным концом на подающей каретке с возможностью поворота в горизонтальной плоскости, а другая часть рычагов шарнирно закреплена свободным концом на подушках с возможностью поворота в вертикальной плоскости. Рычаги, закрепленные на подающей каретке, взаимодействуют продольными пазами 15 с вертикальными штифтами 12, закрепленными на подушках, а копирными пазами взаимодействуют с вертикальными пальцами, закрепленными на ползуне. Рычаги, смонтированные на ползушках, взаимодействуют продольными пазами с горизонтальными штифтами, закрепленными на грейферных линейках, а копирными пазами взаимодействуют с горизонтальными пальцами, закрепленными в ползуне. 4 ил.
Изобретение относится к обработке металлов давлением и может быть использовано для перемещения деталей (подачи) между рабочими позициями многопозиционного пресса.
Цель изобретения - расширение технологических возможностей путем увеличения высоты подъема грейферных линеек и величины хода поперечного перемещения ползу шек при продольном перемещении ползуна относительно подающей каретки.
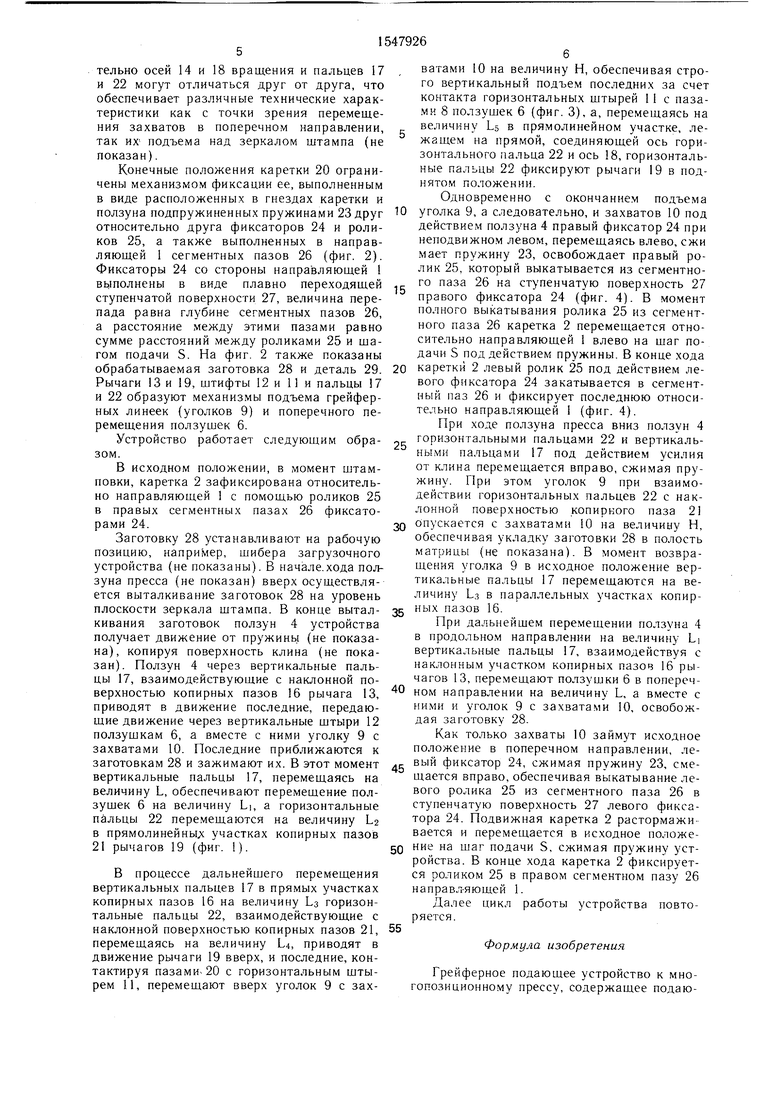
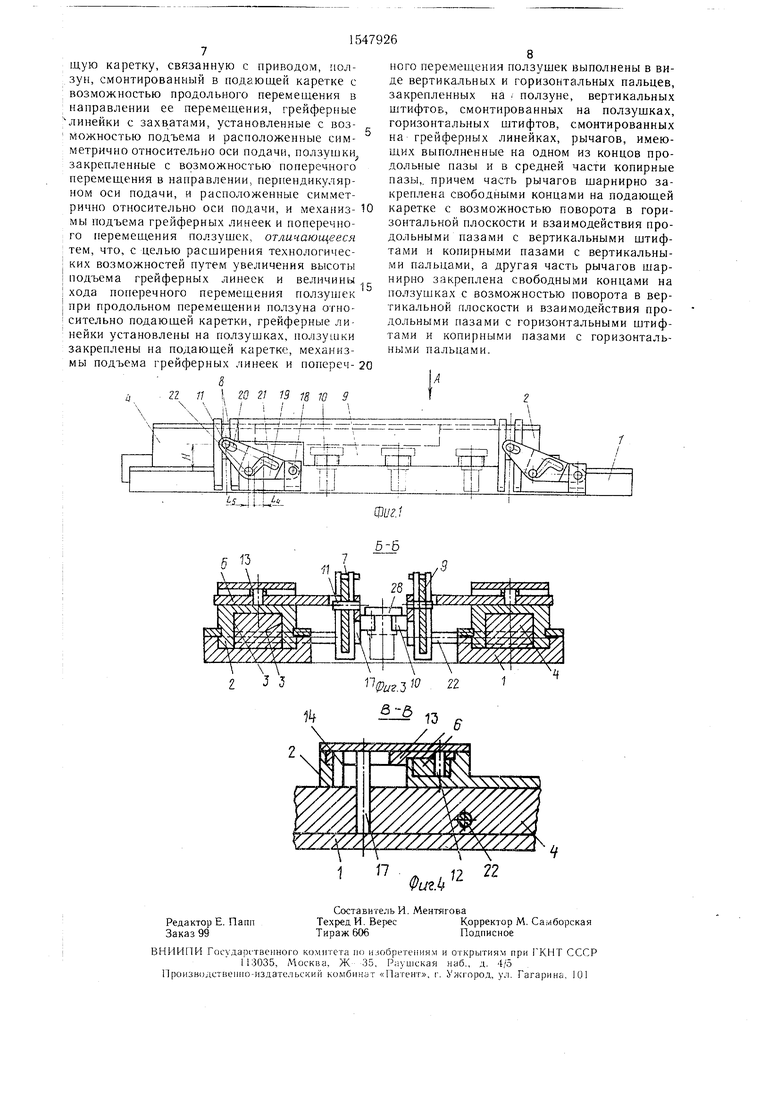
На фиг. 1 изображено грейферное подающее устройство к многопозиционному прессу; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез Е-В на фиг. 2.
Грейферное подающее устройство содержит П-образную направляющую 1, в которой установлена подающая каретка 2 с продольным пазом 3 (фиг. 3 и 4). В пазу 3 размещен ползун 4 с возможностью перемещения его от привода, например, закрепленного на верхней плите штампа клина, и от пружины возврата, установленной в устройстве (не показаны).
В каретке выполнены два поперечных направляющих паза 5 (фиг. 2), в которых установлены с возможностью синхронного перемещения Г-образные ползушки 6.
Каждая ползушка имеет направляющий паз 7, выполненный перпендикулярно относительно оси горизонтально составляющей ее, и паз 8, выполненный параллельно этой оси. Вертикальная составляющая паза 7 со стороны направляющей 1 выполнена в виде выступа относительно паза 8. В пазах 7 пол- зушек установлены с возможностью направленного вертикального перемещения относительно последних грейферные линейки, выполненные в виде уголков 9 с захватами 10 и горизонтальными штифтами 11. Последние установлены с возможностью контакта с пазами 8.
На ползушках закреплены вертикальные штифты 12 для взаимодействия в горизонтальной плоскости с основными рычагами 13, размещенными в каретке на осях 14. Рычаги имеют выполненные на свободных от крепления концах их прямолинейные продольные пазы 15 для контакта с указанными штырями.
Каждый рычаг 13 имеет V-образный ко- пирный паз 16, образованный прямым и наклонным участками относительно прямой, соединяющей ось вращения рычага 13 и ось его
0
паза, расположенной между этой осью и пазом (фмк 4) и взаимодействующей с вертикальным пальцем 17, закрепленным на ползуне 4 (фиг. 2).
Для подъема уголка 9 но пазам 7 ползушек 6 в выступе вертикальной составляющей этого паза на осях 18 установлены дополш тельные рычаги 19, имеющие каждый на свободном от крепления конце прямолинейный продольный паз 20 для контакта с соотQ ветственно закрепленным на уголке 9 горизонтальным штифтом II и копирные пазы 21 для контакта с закрепленным на ползуне 4 горизонтальным пальцем 22. Каждый копир- пый паз 21 образован тремя участками: одним - расположенным на прямой, сое5 диняющей оси вращения этого рычага и его паза 20, другим - расположенным на прямой, соединяющей в конечном положении (фиг. 1) ось 8 вращения этого рычага с осью горизонтального пальца 22, а также наклонным соединяющим их участком, при этом последний может быть выполнен ломанным для обеспечения необходимой скорости перемещения захватов.
Величина L перемещения ползушек в поперечном направлении равна проекции расстояния от оси вращения рычага 13 до вертикального штифта 12 на ось ползушки 6. Величина L. перемещения вертикальных пальцев 17 в продольном направлении в момент их контакта с наклонным участком коиирного паза 16 до начала подъема и
0 дальнейшего выстаивания уголка 9 при перемещении ползушек 6 в поперечном направлении равна проекции наклонного участка V-образного копирного паза 16 на ось ползуна 4 и равна длине L2 прямого участка копирного паза 21, а длина LS прямого участ- ° ка копирного паза 16 равна сумме длин L4 и Ls (L.i - проекция наклонного участка копирного паза 21 на прямую, соединяющую ось горизонтального пальца 22 с осью 18 вращения рычага 19, LS - длина участка, расQ положенного на упомянутой прямой, характеризующего величину перемещения горизонтального пальца 22 в момент выстаивания рычага 19 в верхнем его положении). Величина Н подъема уголка 9 равна проекции прямой, соединяющей ось 18 враще5 ния рычага 19 и ось его паза 20 на ось паза 8.
Копирные пазы 16 и 21 соответственно по линейным и угловым параметрам, а также их расположения на рычагах 13 и 19 относи5
тельно осей 14 и 18 вращения и пальцев 17 , и 22 могут отличаться друг от друга, что обеспечивает различные технические характеристики как с точки зрения перемещения захватов в поперечном направлении, 5 так их1 подъема над зеркалом штампа (не показан).
Конечные положения каретки 20 ограничены механизмом фиксации ее, выполненным в виде расположенных в гнездах каретки и ползуна подпружиненных пружинами 23 друг Ю относительно друга фиксаторов 24 и роликов 25, а также выполненных в направляющей 1 сегментных пазов 26 (фиг. 2). Фиксаторы 24 со стороны направляющей 1 выполнены в виде плавно переходящей ступенчатой поверхности 27, величина перепада равна глубине сегментных пазов 26, а расстояние между этими пазами равно сумме расстояний между роликами 25 и шагом подачи S. На фиг. 2 также показаны
15
ватами 10 на величину Н, обеспечивая строго вертикальный подъем последних за счет контакта горизонтальных штырей 1 1 с пазами 8 ползушек 6 (фиг. 3), а, перемещаясь на величину L5 в прямолинейном участке, лежащем на прямой, соединяющей ось горизонтального пальца 22 и ось 18, горизонтальные пальцы 22 фиксируют рычаги 19 в поднятом положении.
Одновременно с окончанием подъема уголка 9, а следовательно, и захватов 10 под действием ползуна 4 правый фиксатор 24 при неподвижном левом, перемещаясь влево, ежи мает пружину 23, освобождает правый ролик 25, который выкатывается из сегментного паза 26 на ступенчатую поверхность 27 правого фиксатора 24 (фиг. 4). В момент полного выкатывания ролика 25 из сегментного паза 26 каретка 2 перемещается относительно направляющей 1 влево на шаг подачи S под действием пружины. В конце хода
обрабатываемая заготовка 28 и деталь 29. 20 каретки 2 левый ролик 25 под действием ле- Рычаги 13 и 19, штифты 12 и 11 и пальцы 17вого фиксатора 24 закатывается в сегментный паз 26 и фиксирует последнюю относительно направляющей 1 (фиг. 4).
и 22 образуют механизмы подъема грейферных линеек (уголков 9) и поперечного перемещения ползушек 6.
Устройство работает следующим обра- R зом.
В исходном положении, в момент штамповки, каретка 2 зафиксирована относительно направляющей 1 с помощью роликов 25 в правых сегментных пазах 26 фиксаторами 24.
Заготовку 28 устанавливают на рабочую позицию, например, шибера загрузочного устройства (не показаны). В начале.хода ползуна пресса (не показан) вверх осуществляется выталкивание заготовок 28 на уровень плоскости зеркала штампа. В конце выталкивания заготовок ползун 4 устройства получает движение от пружины (не показана), копируя поверхность клина (не показан). Ползун 4 через вертикальные пальцы 17, взаимодействующие с наклонной поПри ходе ползуна пресса вниз ползун 4 горизонтальными пальцами 22 и вертикальными пальцами 17 под действием усилия от клина перемещается вправо, сжимая пружину. При этом уголок 9 при взаимодействии горизонтальных пальцев 22 с наклонной поверхностью копиркого паза 21 3Q опускается с захватами 10 на величину Н. обеспечивая укладку заготовки 28 в полость матрицы (не показана). В момент возвращения уголка 9 в исходное положение вертикальные пальцы 17 перемещаются на величину LS в параллельных участках копир- ных пазов 16.
При дальнейшем перемещении ползуна 4 в продольном направлении на величину LI вертикальные пальцы 17, взаимодействуя с наклонным участком копирных пазов 16 рычагов 13, перемещают ползушки 6 в попереч35
верхностью копирных пазов 16 рычага 13,40 ном направлении на величину L, а вместе с
приводят в движение последние, передаю- ими и утолок 9 с захватами 10, освобожщие движение через вертикальные штыри 12Дая заготовку 28.
ползушкам 6, а вместе с ними уголку 9 сКак только захваты 10 займут исходное
захватами 10. Последние приближаются кположение в поперечном направлении, лезаготовкам 28 и зажимают их. В этот момент45 вый Фиксат°Р 24 сжимая пружину 23, смевертикальные пальцы 17, перемещаясь на величину L, обеспечивают перемещение ползушек 6 на величину LI, а горизонтальные пальцы 22 перемещаются на величину L2 в прямолинейны ; участках копирных пазов 21 рычагов 19 (фиг. 1).
В процессе дальнейшего перемещения вертикальных пальцев 17 в прямых участках копирных пазов 16 на величину L3 горизонтальные пальцы 22, взаимодействующие с наклонной поверхностью копирных пазов 21, перемещаясь на величину L4, приводят в движение рычаги 19 вверх, и последние, контактируя пазами-20 с горизонтальным штырем 11, перемещают вверх уголок 9 с зах50
55
щается вправо, обеспечивая выкатывание левого ролика 25 из сегментного паза 26 в ступенчатую поверхность 27 левого фиксатора 24. Подвижная каретка 2 растормаживается и перемещается в исходное положение на шаг подачи S, сжимая пружину устройства. В конце хода каретка 2 фиксируется роликом 25 в правом сегментном пазу 26 направл-яющей 1.
Далее цикл работы устройства повторяется.
Формула изобретения
Грейферное подающее устройство к многопозиционному прессу, содержащее подаю
5
ватами 10 на величину Н, обеспечивая строго вертикальный подъем последних за счет контакта горизонтальных штырей 1 1 с пазами 8 ползушек 6 (фиг. 3), а, перемещаясь на величину L5 в прямолинейном участке, лежащем на прямой, соединяющей ось горизонтального пальца 22 и ось 18, горизонтальные пальцы 22 фиксируют рычаги 19 в поднятом положении.
Одновременно с окончанием подъема уголка 9, а следовательно, и захватов 10 под действием ползуна 4 правый фиксатор 24 при неподвижном левом, перемещаясь влево, ежи мает пружину 23, освобождает правый ролик 25, который выкатывается из сегментного паза 26 на ступенчатую поверхность 27 правого фиксатора 24 (фиг. 4). В момент полного выкатывания ролика 25 из сегментного паза 26 каретка 2 перемещается относительно направляющей 1 влево на шаг подачи S под действием пружины. В конце хода
0 каретки 2 левый ролик 25 под действием ле- вого фиксатора 24 закатывается в сегментный паз 26 и фиксирует последнюю относительно направляющей 1 (фиг. 4).
При ходе ползуна пресса вниз ползун 4 горизонтальными пальцами 22 и вертикальными пальцами 17 под действием усилия от клина перемещается вправо, сжимая пружину. При этом уголок 9 при взаимодействии горизонтальных пальцев 22 с наклонной поверхностью копиркого паза 21 опускается с захватами 10 на величину Н. обеспечивая укладку заготовки 28 в полость матрицы (не показана). В момент возвращения уголка 9 в исходное положение вертикальные пальцы 17 перемещаются на величину LS в параллельных участках копир- ных пазов 16.
При дальнейшем перемещении ползуна 4 в продольном направлении на величину LI вертикальные пальцы 17, взаимодействуя с наклонным участком копирных пазов 16 рычагов 13, перемещают ползушки 6 в попереч
ном направлении на величину L, а вместе с
вый Фиксат°Р 24 сжимая пружину 23, сме
щается вправо, обеспечивая выкатывание левого ролика 25 из сегментного паза 26 в ступенчатую поверхность 27 левого фиксатора 24. Подвижная каретка 2 растормаживается и перемещается в исходное положение на шаг подачи S, сжимая пружину устройства. В конце хода каретка 2 фиксируется роликом 25 в правом сегментном пазу 26 направл-яющей 1.
Далее цикл работы устройства повторяется.
Формула изобретения
Грейферное подающее устройство к многопозиционному прессу, содержащее подающую каретку, связанную с приводом, ползун, смонтированный в подающей каретке с возможностью продольного перемещения в направлении ее перемещения, грейферные линейки с захватами, установленные с возможностью подъема и расположенные симметрично относительно оси подачи, ползушки., закрепленные с возможностью поперечного перемещения в направлении, перпендикулярном оси подачи, и расположенные симметного перемещения ползушек выполнены в виде вертикальных и горизонтальных пальцев, закрепленных на ползуне, вертикальных штифтов, смонтированных на ползушках, горизонтальных штифтов, смонтированных на грейферных линейках, рычагов, имеющих выполненные на одном из концов продольные пазы и в средней части копирные пазы, причем часть рычагов шарнирно закреплена свободными концами на подающей
рично относительно оси подачи, и механиз- Ю каретке с возможностью поворота в горимы подъема грейферных линеек и поперечного перемещения ползушек, отличающееся тем, что, с целью расширения технологических возможностей путем увеличения высоты
зонтальнои плоскости и взаимодействия продольными пазами с вертикальными штифтами и копирными пазами с вертикальными пальцами, а другая часть рычагов шарподъема грейферных линеек и величины нирно закреплена свободными концами на
хода поперечного перемещения ползушек при продольном перемещении ползуна относительно подающей каретки, грейферные ли нейки установлены на ползушках, ползушки закреплены на подающей кареткр, механизмы подъема грейферных линеек и попереч- 20
ползушках с возможностью поворота в вертикальной плоскости и взаимодействия продольными пазами с горизонтальными штифтами и копирными пазами с горизонтальными пальцами.
- JI
ного перемещения ползушек выполнены в виде вертикальных и горизонтальных пальцев, закрепленных на ползуне, вертикальных штифтов, смонтированных на ползушках, горизонтальных штифтов, смонтированных на грейферных линейках, рычагов, имеющих выполненные на одном из концов продольные пазы и в средней части копирные пазы, причем часть рычагов шарнирно закреплена свободными концами на подающей
зонтальнои плоскости и взаимодействия продольными пазами с вертикальными штифтами и копирными пазами с вертикальными пальцами, а другая часть рычагов шарползушках с возможностью поворота в вертикальной плоскости и взаимодействия продольными пазами с горизонтальными штифтами и копирными пазами с горизонтальными пальцами.
Шиг1
