Фиг.З
вид 5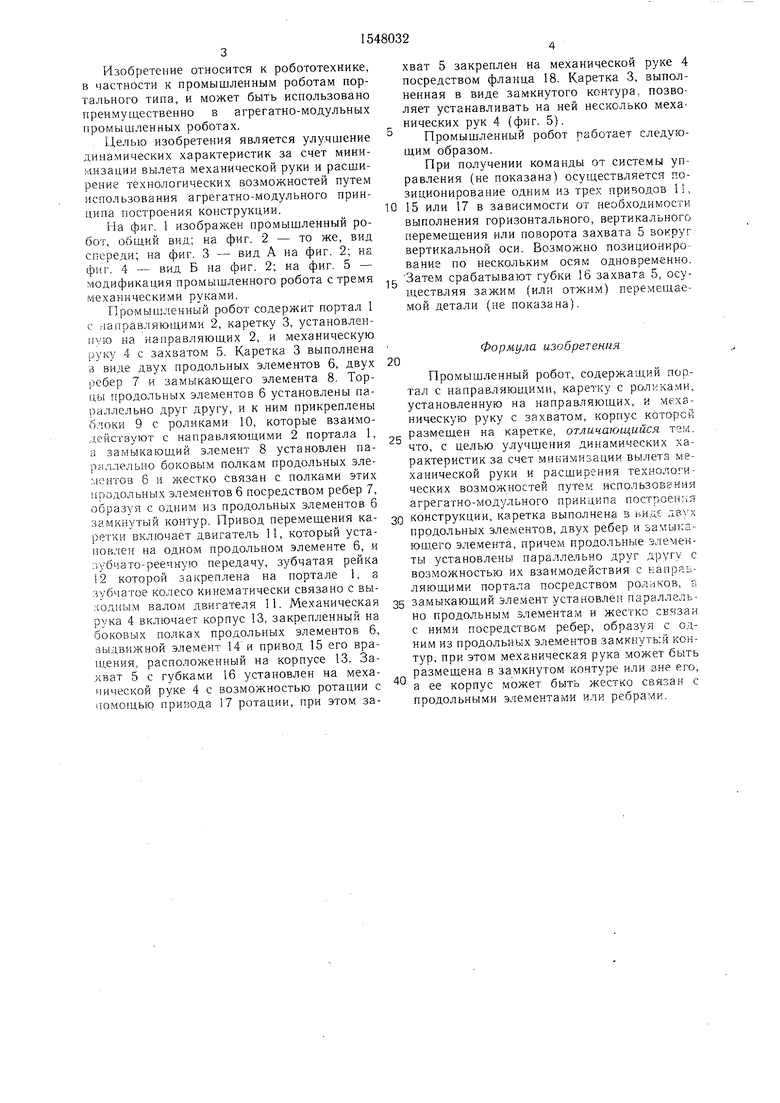
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОЯРУСНОГО КОМПОНОВАНИЯ И ПЕРЕКОМПОНОВАНИЯ РАБОЧЕЙ ПОЗИЦИИ АВТОМАТИЧЕСКОЙ ЛИНИИ И ПЕРЕКОМПОНУЕМАЯ РАБОЧАЯ ПОЗИЦИЯ АВТОМАТИЧЕСКОЙ ЛИНИИ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2011 |
|
RU2487004C2 |
| Промышленный робот | 1976 |
|
SU603577A1 |
| Автоматизированная технологическая единица | 1985 |
|
SU1240577A1 |
| Манипулятор | 1983 |
|
SU1096096A1 |
| Промышленный робот | 1980 |
|
SU880713A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
| Промышленный робот | 1978 |
|
SU837851A1 |
| Модульный манипулятор | 1980 |
|
SU952578A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
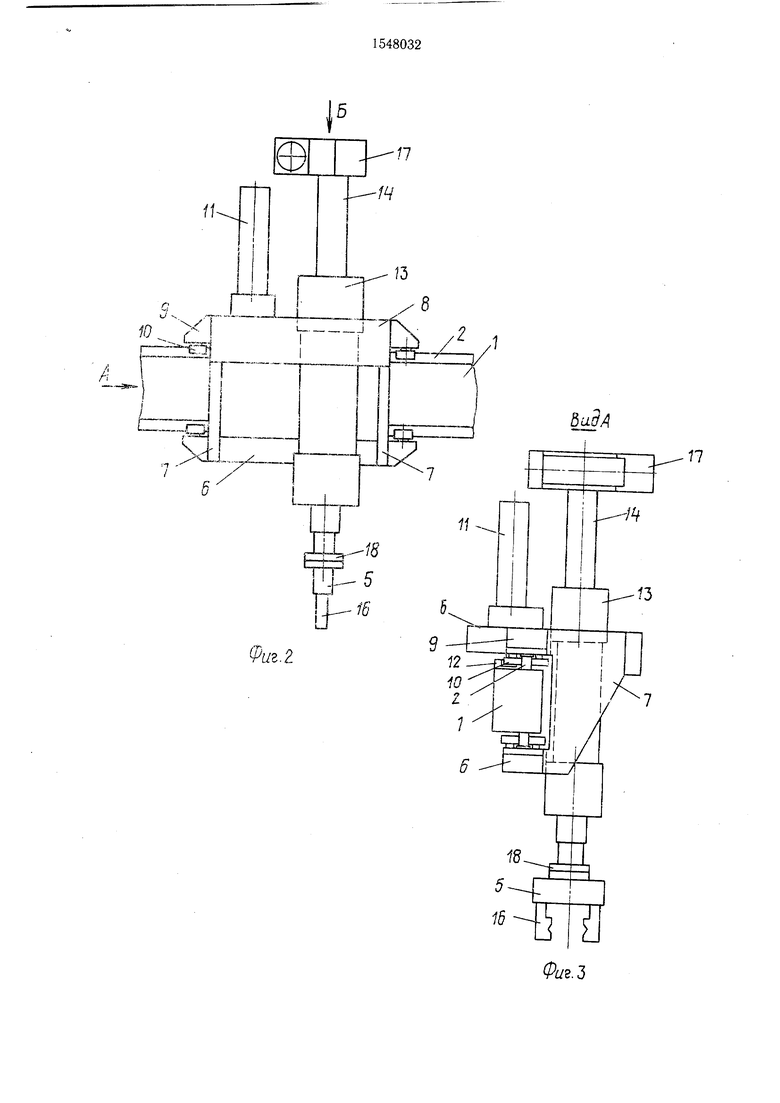
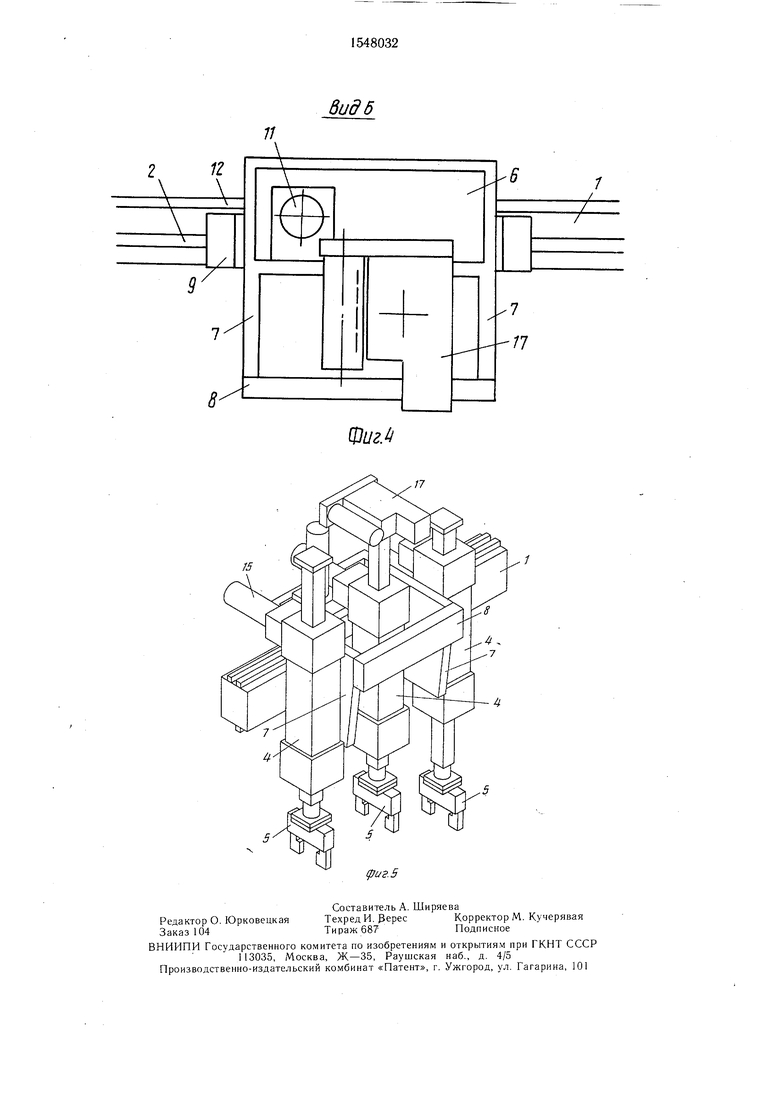
Изобретение относится к робототехнике, в частности к промышленным роботам портального типа, и может быть использовано в агрегатно-модульных промышленных роботах. Целью изобретения является улучшение динамических характеристик за счет минимизации вылета механической руки и расширение технологических возможностей путем использования агрегатно-модульного принципа построения конструкции. Промышленный робот содержит портал 1 и каретку 3 с механической рукой 4, установленную на портале. Каретка выполнена в виде замкнутого профиля, созданного двумя параллельно расположенными продольными элементами 6 и замыкающим элементом 8, связанными между собой посредством двух ребер 7. Корпус механической руки закреплен на полках продольных элементов 6 и может быть размещен в замкнутом контуре или вне его. 5 ил.
Фиг.4
17
| Козырев Ю Г | |||
| и др | |||
| Современные промышленные роботы.: Каталог | |||
| - М.: Машиностроение, 1984, с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
