01
4
00
оэ
ОЭ Јь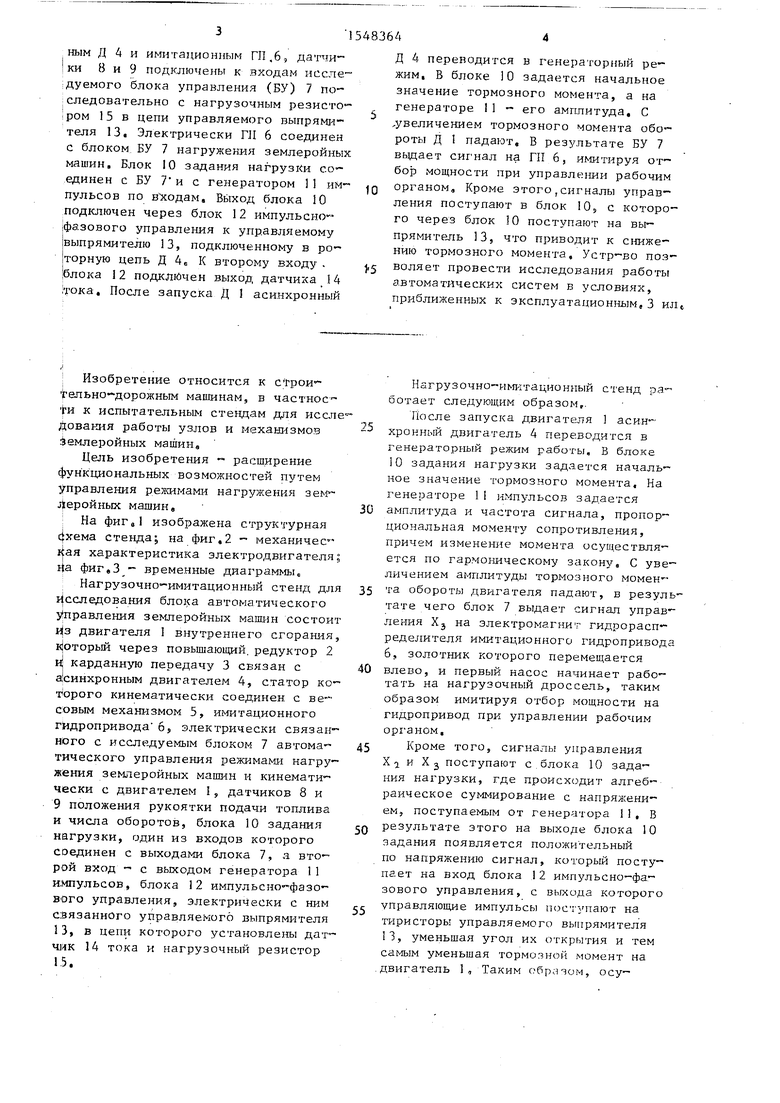
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический стенд для испытаний трансмиссий | 1987 |
|
SU1460640A1 |
| Стенд для испытания передач | 1983 |
|
SU1096516A1 |
| Стенд для обкатки и испытания двигателя внутреннего сгорания | 1990 |
|
SU1716366A1 |
| Способ нагружения асинхронного двигателя при его испытании методом взаимной нагрузки | 2019 |
|
RU2712741C1 |
| Стенд для испытания дизельного двигателя | 1984 |
|
SU1310669A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО ТОКА | 2021 |
|
RU2777694C1 |
| Стенд для исследования систем автоматического управления нагрузкой горной машины | 1973 |
|
SU443982A1 |
| Устройство для моделирования нагрузок на валу двигателя | 1974 |
|
SU496571A1 |
| Способ испытания асинхронных двигателей методом взаимной нагрузки | 2019 |
|
RU2706449C1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
Изобретение относится к строительно-дорожным машинам и может быть использовано для исследования работы узлов землеройных машин. Цель изобретения - расширение функциональных возможностей путем управления режимами нагружения землеройных машин. Для этого стенд снабжен имитационным гидроприводом (ГП) 6, датчиками тока 14, положения 8 и 9 рукоятки подачи топлива и числа оборотов 9 двигателя (Д) 1 внутреннего сгорания и блоком 10 задания нагрузки. При этом Д 1 кинематически связан с асинхронным Д 4 и имитационным ГП 6, датчики 8 и 9 подключены к входам исследуемого блока управления (БУ) 7 последовательно с нагрузочным резистором 15 в цепи управляемого выпрямителя 13. Электрически ГП 6 соединен с блоком БУ 7 нагружения землеройных машин. Блок 10 задания нагрузки соединен с БУ 7 и с генератором 11 импульсов по входам. Выход блока 10 подключен через блок 12 импульсно-фазового управления к управляемому выпрямителю 13, подключенному в роторную цепь Д 4. Ко второму входу блока 12 подключен выход датчика 14 тока. После запуска Д 1 асинхронный Д 4 переводится в генераторный режим. В блоке 10 задается начальное значение тормозного момента, а на генераторе 11 - его амплитуда. С увеличением тормозного момента обороты Д 1 падают. В результате БУ 7 выдает сигнал на ГП 6, имитируя отбор мощности при управлении рабочим органом. Кроме этого сигналы управления поступают в блок 10, с которого через блок 12 поступают на выпрямитель 13, что приводит к снижению тормозного момента. Устройство позволяет провести исследования работы автоматических систем в условиях, приближенных к эксплуатационным. 3 ил.
/«
15
Vac
Фиг.1
ным Д 4 и имитационным ГП.6, да-пш- ки 8 и 9 подключены к входам исследуемого блока управления (БУ) 7 последовательно с нагрузочным резистором 15 в цепи управляемого выпрямителя 13. Электрически ГЛ 6 соединен с блоком БУ 7 нагружения землеройных машин. Блок 10 задания нагрузки соединен с БУ 7 и с генератором 11 им пульсов по входам. Выход блока 10 подключен через блок 12 импульсно- фазового управления к управляемому выпрямителю 13, подключенному в ро- 1торную цепь Д 4,, К второму входу . блока 12 подключен выход датчика 14 тока. После запуска Д 1 асинхронный
Изобретение относится к строительно-дорожным машинам, в частное |ри к испытательным стендам для исследования работы узлов и механизмов Землеройных машин,,
Цель изобретения - расширение функциональных возможностей путем управления режимами нагружения зем Леройных машин.
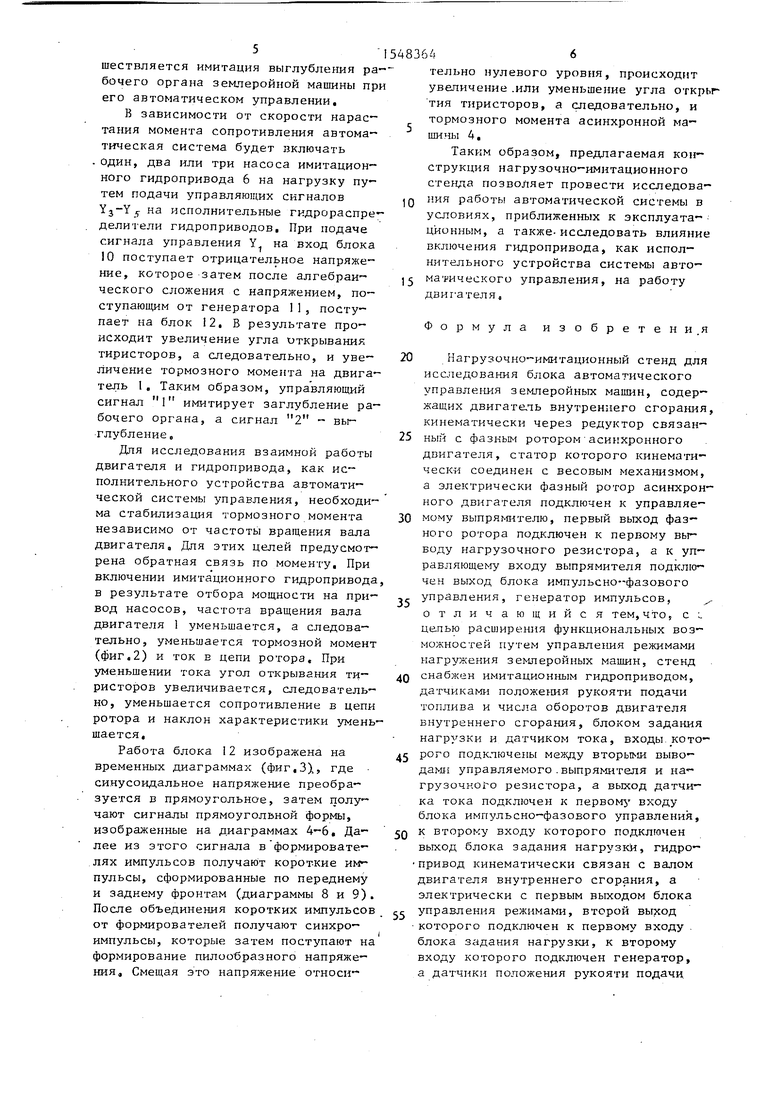
На фиг„1 изображена структурная сЫема стенда; на фиг,2 - механичес- ая характеристика электродвигателя; Йа фиг,3 - временные диаграммы.
Нагрузочно-имитационный стенд для Исследования блока автоматического управления землеройных машин состоит з двигателя 1 внутреннего сгорания, Который через повышающий редуктор 2 и карданную передачу 3 связан с а синхронным двигателем 4, статор которого кинематически соединен с весовым механизмом 5, имитационного гидропривода 65 электрически связанного с исследуемым блоком 7 автоматического управления режимами нагружения землеройных машин и кинематически с двигателем Is датчиков 8 и 9 положения рукоятки подачи топлива и числа оборотов, блока 10 задания нагрузки, один из входов которого соединен с выходами блока 7, а второй вход - с выходом генератора 11 импульсов, блока 12 импульсно-фазо- вого управления, электрически с ним связанного управляемого выпрямителя 13, в цепи которого установлены датчик 14 тока и нагрузочный резистор 15.
Д 4 переводится в генераюрный режим, В блоке 10 задается начальное значение тормозного момента, а на генераторе I1 - его амплитуда. С увеличением тормозного момента обороты Д 1 падают, В результате БУ 7 выдает сигнал на ГП 6, имитируя отбор мощности при управлении рабочим
органом. Кроме этого,сигналы управления поступают в блок 10, с которого через блок 0 поступают на выпрямитель 13, что приводит к снижению тормозного момента, Устр-во позЈ воляет провести исследования работы автоматических систем в условиях, приближенных к эксплуатационным,3 ил
Нагрузочно-имктационный стенд работает следующим образом.
После запуска двигателя 1 асин„.
хронныи двигатель 4 переводится в генераторный режим работы. В блоке 10 задания нагрузки задается начальное значение тормозного момента. На генераторе 11 импульсов задается
амплитуда и частота сигнала, пропорциональная моменту сопротивления, причем изменение момента осуществляется по гармоническому закону, С увеличением амплитуды тормозного момента обороты двигателя падают, в результате чего блок 7 выдает сигнал управления Хэ на электромагни-1 гидрораспределителя имитационного гидропривода 6, золотник которого перемещается
влево, и первый насос начинает работать на нагрузочный дроссель, таким
образом имитируя отбор мощности на гидропривод при управлении рабочим органом.
Кроме того, сигналь; управления X Q. и Х3 поступают с блока 10 задания нагрузки, где происходит алгебраическое суммирование с напряжением, поступаемым от генератора 11, В
результате этого на выходе блока 10 задания появляется положительный по напряжению сигнал, который поступает на вход блока 12 импульсно-фазового управления, с выхода которого управляющие импульсы поступают на
тиристоры управляемого выпрямителя 13, уменьшая угол их открытия и гем самым уменьшая тормозной момент на двигатель 1, Таким образом, осу-
шествляется имитация выглубления ра- бочего органа землеройной машины при его автоматическом управлении.
В зависимости от скорости нарастания момента сопротивления автоматическая система будет включать один, два или три насоса имитационного гидропривода 6 на нагрузку путем подачи управляющих сигналов Y3-Y5 на исполнительные гидрораспре- делители гидроприводов. При подаче сигнала управления Y1 на вход блока 10 поступает отрицательное напряжение, которое затем после алгебраического сложения с напряжением, поступающим от генератора 11, поступает на блок 12. В результате происходит увеличение угла открывания, тиристоров, а следовательно, и увеличение тормозного момента на двигатель I. Таким образом, управляющий сигнал 1 имитирует заглубление рабочего органа, а сигнал 2 - вьг глубление„
Для исследования взаимной работы вигателя и гидропривода, как исполнительного устройства автоматической системы управления, необходима стабилизация тормозного момента независимо от частоты вращения вала вигателя. Для этих целей предусмотрена обратная связь по моменту. При включении имитационного гидропривода, в результате отбора мощности на приод насосов, частота вращения вала вигателя 1 уменьшается, а следовательно, уменьшается тормозной момент (фиг.2) и ток в цепи ротора. При уменьшении тока угол открывания тиисторов увеличивается, следовательно, уменьшается сопротивление в цепи отора и наклон характеристики уменьается.
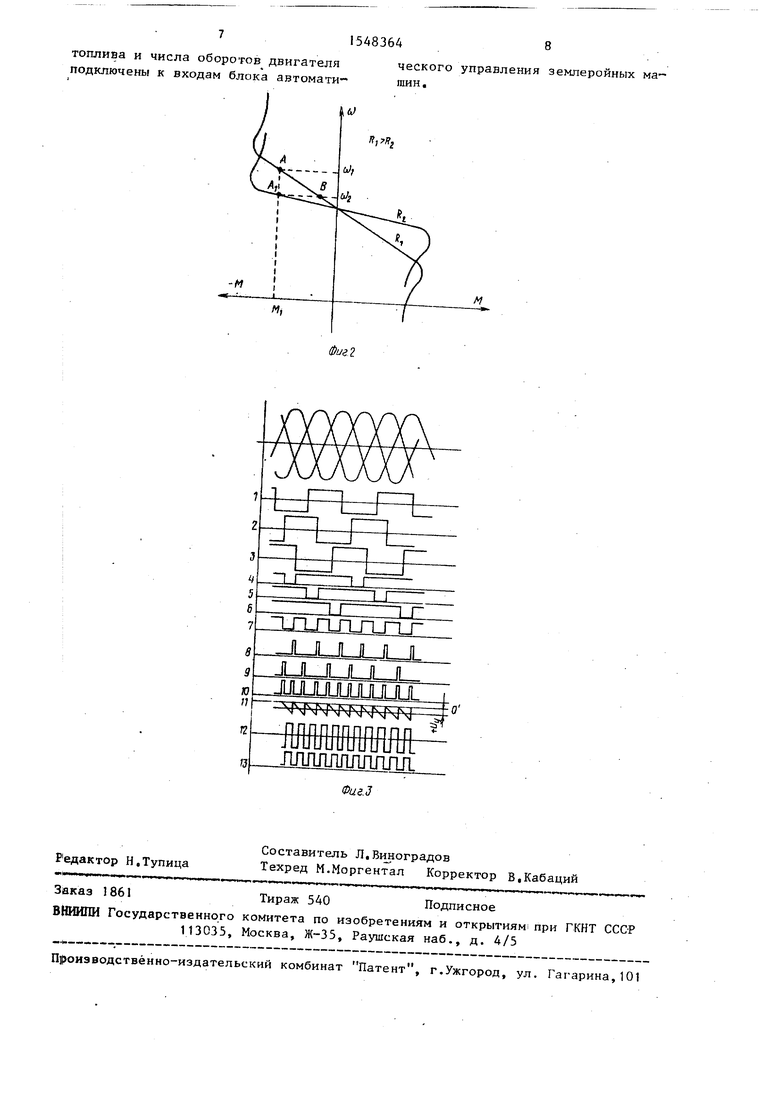
Работа блока 12 изображена на временных диаграммах (фиг.З),, где синусоидальное напряжение преобразуется в прямоугольное, затем получают сигналы прямоугольной формы, изображенные на диаграммах 4-6, Далее из этого сигнала в формирователях импульсов получают короткие импульсы, сформированные по переднему и заднему фронтам (диаграммы 8 и 9). После объединения коротких импульсов
от формирователей получают синхро-
i импульсы, которые затем поступают на
формирование пилообразного напряжения. Смещая это напряжение относи-
483646
тельно нулевого уровня, происходит увеличение .или уменьшение угла откры тия тиристоров, а следовательно, и тормозного момента асинхронной машины 4.
Таким образом, предлагаемая конструкция нагрузочно-имитационного стенда позволяет провести исследова-
JQ ния работы автоматической системы в условиях, приближенных к эксплуатационным, а также-исследовать влияние включения гидропривода, как исполнительного устройства системы авто15 магического управления, на работу двигателя.
Формула изобретени.я
20 Нагрузочно-имитационный стенд для исследования блока автоматического управления землеройных машин, содержащих двигатель внутреннего сгорания, кинематически через редуктор связан-
25 ный с фазным ротором асинхронного двигателя, статор которого кинематически соединен с весовым механизмом, а электрически фазный ротор асинхронного двигателя подключен к управляв-
30 мому выпрямителю, первый выход фазного ротора подключен к первому выводу нагрузочного резистора, а к управляющему входу выпрямителя подключен выход блока импульсно-фазового
управления, генератор импульсов.
отличающийся тем,что, с L цепью расширения функциональных возможностей путем управления режимами нагружения землеройных машин, стенд
снабжен имитационным гидроприводом, датчиками положения рукояти подачи топлива и числа оборотов двигателя внутреннего сгорания, блоком задания нагрузки и датчиком тока, входы кото-
рого подключены между вторыми выводами управляемого.выпрямителя и нагрузочного резистора, а выход датчика тока подключен к первому входу блока импульсно-фазового управления,
к второму входу которого подключен выход блока задания нагрузки, гидро- привод кинематически связан с валом двигателя внутреннего сгорания, а электрически с первым выходом блока
управления режимами, второй выход которого подключен к первому входу блока задания нагрузки, к второму входу которого подключен генератор, а датчики положения рукояти подачи
топлива и числа оборотов двигателя подключены к входам блока автомати lJTJTJ LrLri r
JLJLJ-JLJ JL JUULJLMJLJllULJL
W sWvbNческого управления землеройных машин.
| Багиров А.А, и др | |||
| Двигатели внутреннего сгорания строительных и дорожных машин, - М.: Машиностроение, 1974, с | |||
| Кулисный парораспределительный механизм | 1920 |
|
SU177A1 |
| Бохан Н.Н, и др | |||
| Механизация и автоматизация на сельскохозяйственных ремонтных предприятиях, - Минск: Урожай, 1985, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
