| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПРЕЦИЗИОННОГО ПОЗИЦИОНИРОВАНИЯ | 2013 |
|
RU2547981C2 |
| УСТРОЙСТВО УДЕРЖАНИЯ ИНСТРУМЕНТОВ ДЛЯ МАНИПУЛЯТОРА РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ | 2017 |
|
RU2745880C2 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2800733C1 |
| Устройство для соединения лент-носителей разделяющихся застежек-молний с замком | 1990 |
|
SU1790910A2 |
| Манипулятор | 1976 |
|
SU766852A1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО | 2019 |
|
RU2762223C2 |
| Манипулятор | 1984 |
|
SU1227459A1 |
| Захват | 1976 |
|
SU651942A1 |
| Рука манипулятора | 1985 |
|
SU1303400A1 |
| Устройство для соединения лент-носителей разделяющихся застежек-молний с замком | 1989 |
|
SU1734670A1 |
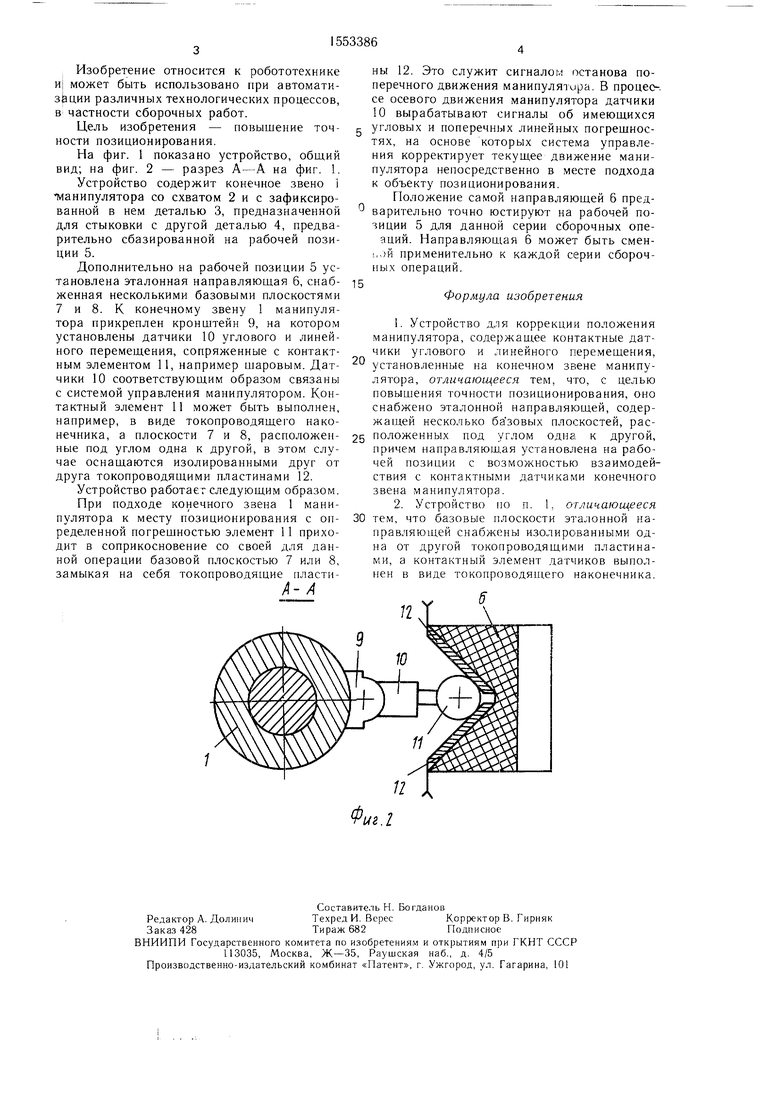
Изобретение относится к робототехнике и может быть использовано, например, для автоматизации сборки. Целью изобретения является повышение точности позиционирования. Для этого на рабочей позиции 5, на которой установлена одна из сопрягаемых деталей 4, дополнительно устанавливается эталонная направляющая 6, оснащенная базовыми плоскостями 7 и 8. На конечном звене 1 манипулятора, в схвате 2 которого находится другая сопрягаемая деталь 3, установлены датчики 10 углового и линейного перемещений, имеющие контактный элемент 11. Процесс позиционирования конечного звена 1 манипулятора в ходе сопряжения деталей 3 и 4 корректируется системой управления по сигналам датчиков 10, взаимодействующих с направляющей 6. 1 з.п.ф-лы, 2 ил.
| Брагин В | |||
| Б | |||
| и др | |||
| Системы очувствления и адаптивные промышленные роботы | |||
| М.: Машиностроение, 1985, с | |||
| Переносная печь-плита | 1920 |
|
SU184A1 |
