Изобретение относится к машиностроению и может быть использовано для автоматизации сборочных процессов.
Цель изобретения - расширение технологических возможностей и повышение надежности.
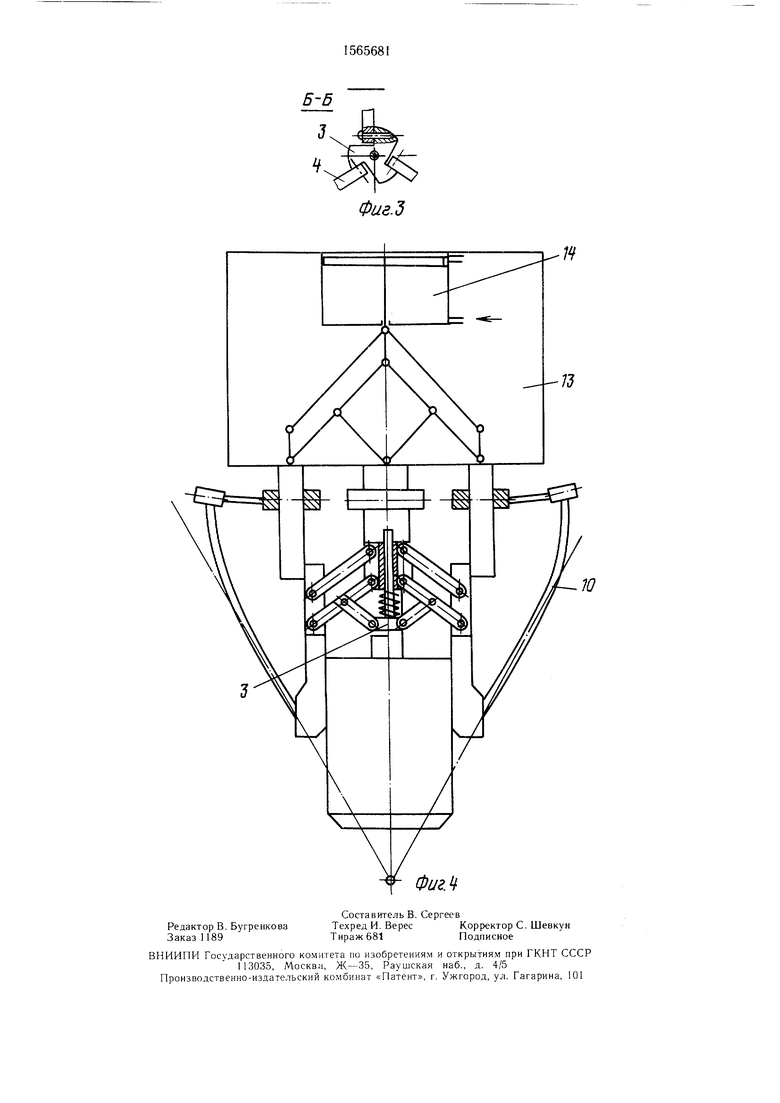
На фиг. 1 изображена принципиальная схема устройства; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - схема устройства при переносе детали.
Устройство .содержит три зажимных губки 1, связанные с ползуном 2 и основанием направляющей 3, коромыслами 4 и тремя шарнирными параллелограммами, каждый из которых образован зажимной губкой 1, поворотными рычагами 5 и 6 и ползуном 2. Коромысло 4 шарнирно соединено одним концом с серединой поворотного рычага 6, длина которого равна двум длинам коромысла, а другим - с основанием направляющей 3.
Шарниры коромысел 4 и зажимные губки 1 закреплены по окружности основания под углом 120°. Ползун 2 перемещается по направляющей 7 под действием пружины 8. Каждая зажимная губка 1 связана с быстросменным креплением 9 через наклонный упругий стержень 10 и радиальный упругий стержень 11.
Указанное сборочное устройство устанавливается и закрепляется на зажимных губках 12 широкодиапазонного захватного устройства 13, содержащего привод 14 перемещения зажимных губок 12.
Устройство работает следующим образом.
Манипулятор, на котором установлено захватное устройство 13 с плоскопараллельным перемещением губок 12, перед выполнением сборочной операции получает из магазинного устройства сборочное устройство с ручным или автоматическим быстросменным креплением 9 и устанавливает его на губках 12.
сл
О СЛ
О5
00
Для захватывания вала включается привод 14, который раскрывает губки 12, и усилие от губок 12 передается через деформируемые упругие стержни 11 и 10 к зажимным губкам 1, которые раскрываются.
расположенного на общей оси симметрии между верхним Г и нижним Д центрами податливости соответственно радиальных 11 и наклонных 10 упругих стержней.
Для формирования радиальных и углоРасположение и соотношение длин коро- ° вых центрирующих усилий, способствующих мысла 4 и поворотного рычага 5 выбраны таким образом, что обеспечивают прямолинейное перемещение зажимных губок 1. При шарнирных параллелограммах, каждый из которых образован зажимной губкой 10
1,поворотными рычагами 5 и 6 и ползуном
2,обеспечивают плоскопараллельное перемещение зажимных губок. Захватывание вала происходит при отключении привода 14. Необходимое усилие захватывания создает пружина 8.
соединению вала с соответствующей деталью, общий центр податливости Г должен находиться у свободной торцовой поверхности указанного вала.
Формула изобретения
15
Сборочно-захватное устройство, содержащее привод и зажимные губки, соединенные с ним посредством рычажных систем, каждая из которых содержит коромысло и два поворотных рычага, образующих параллелограмм и соединенных, с одной стороны с зажимной губкой и с другой стороны со штоком привода, совпадающим с 20 осью устройства, отличающееся тем, что, с целью расширения технологических возможностей и повышения надежности, каждая из не менее чем трех зажимных губок дополнительно снабжена стержнем, расположенным в радиальном направлении в плоскости,
При переносе захваченного вала до позиции сборки для исключения нежелательных колебаний вала включают привод 14, который, деформируя упругие стержни 10 и 11, захватывает губками 12 зажимные губки 1, где размещается вал.
При введении вала в отверстиях отключается привод 14 и за счет упругости стержней 10 и 11 губки 12 принимают
Сборочно-захватное устройство, содержащее привод и зажимные губки, соединенные с ним посредством рычажных систем, каждая из которых содержит коромысло и два поворотных рычага, образующих параллелограмм и соединенных, с одной стороны с зажимной губкой и с другой стороны со штоком привода, совпадающим с 20 осью устройства, отличающееся тем, что, с целью расширения технологических возможностей и повышения надежности, каждая из не менее чем трех зажимных губок дополнительно снабжена стержнем, расположенным в радиальном направлении в плоскости,
ч 1 V J ЛЧ ПСИ1 v И111 у v/rvnit it iin ч v/ ос - ,-«, --м .. j u «..-.. - ,
исходное положение. Если из-за смещения перпендикулярной оси устройства, и соединенным одним концом жестко с губкой, а другим концом - жестко с другим стержнем, расположенным под углом к оси устройства на линии, пересекающейся с осью устмежду собираемыми деталями возникает контакт по фаскам, то возникающие контактные усилия между фасками собираемых деталей передаются упругой системе.
ненным одним концом жестко с губкой, а другим концом - жестко с другим стержнем, расположенным под углом к оси устройства на линии, пересекающейся с осью устУпругая подсистема, включающая ра- 30 Р°иства, причем стержни, соединенные с
диальные стержни 11, под действием указанных сил и моментов допускает вращение вала вокруг центра в податливости, а упругая подсистема из наклонных стержней 10 под действием этих же сил и моментов дозажимными губками, расположены в одной плоскости, а стержни, расположенные под углом к оси устройства, являются образующими конической поверхности, вершина которой лежит на оси устройства, при этом
пускает вращение вокруг нижнего центра Д 35 на свободных концах наклонных стержней
расположены жестко соединенные с ними дополнительные зажимные губки, взаимодействующие между собой через дополнительные рычажные системы, снабженные пружиной сжатия, расположенной между точкой
податливости, координаты которого зависят от диаметра вала. Указанные моменты, а также силы, создающие моменты, вызывают обычно равные и противоположно направленные повороты около двух указанных
центров В и Д. В результате этого получа-40 соединения коромысел и точкой соединения
ется линейное перемещение вала перпен-рычагов, кроме того, зажимные губки имеют
дикулярно общей оси симметрии и поворотвозможность взаимодействия с дополнительвокруг общего центра Г податливости,ными зажимными губками.
расположенного на общей оси симметрии между верхним Г и нижним Д центрами податливости соответственно радиальных 11 и наклонных 10 упругих стержней.
Для формирования радиальных и угловых центрирующих усилий, способствующих
вых центрирующих усилий, способствующих
соединению вала с соответствующей деталью, общий центр податливости Г должен находиться у свободной торцовой поверхности указанного вала.
Формула изобретения
Сборочно-захватное устройство, содержащее привод и зажимные губки, соединенные с ним посредством рычажных систем, каждая из которых содержит коромысло и два поворотных рычага, образующих параллелограмм и соединенных, с одной стороны с зажимной губкой и с другой стороны со штоком привода, совпадающим с осью устройства, отличающееся тем, что, с целью расширения технологических возможностей и повышения надежности, каждая из не менее чем трех зажимных губок дополнительно снабжена стержнем, расположенным в радиальном направлении в плоскости,
- ,-«, --м .. j u «..-.. - ,
перпендикулярной оси устройства, и соеди перпендикулярной оси устройства, и соединенным одним концом жестко с губкой, а другим концом - жестко с другим стержнем, расположенным под углом к оси устройства на линии, пересекающейся с осью устР°иства, причем стержни, соединенные с
зажимными губками, расположены в одной плоскости, а стержни, расположенные под углом к оси устройства, являются образующими конической поверхности, вершина которой лежит на оси устройства, при этом
.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочно-захватное устройство | 1987 |
|
SU1495121A1 |
| Сборочно-захватное устройство | 1987 |
|
SU1468743A1 |
| Захватное устройство | 1985 |
|
SU1283098A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Захватное устройство | 1988 |
|
SU1549748A1 |
| Схват | 1983 |
|
SU1098790A1 |
| Захватное устройство | 1988 |
|
SU1625683A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| ЗАХВАТ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ЗАХВАТЫВАНИЯ И ПЕРЕМЕЩЕНИЯ ПЛОСКИХ ПРЕДМЕТОВ | 2007 |
|
RU2428366C2 |

Изобретение относится к машиностроению и может быть использовано при автоматизации процессов сборки. Цель изобретения - расширение технологических возможностей и повышение производительности. Устройство содержит известное широкодиапазонное устройство с приводом перемещения зажимных губок. Рычажная система, связывающая привод с губками, обеспечивает плоскопараллельное их перемещение. На этих губках устанавливаются последовательно упругие стержни, перпендикулярные оси устройства и наклонные к ней, причем концы наклонных стержней жестко соединены с дополнительными исполнительными губками, которые, в свою очередь, соединены между собой аналогичной указанной рычажной системой. Упругая система стержней обеспечивает совпадение центра податливости устройства с нижним торцом собираемого вала. Для повышения надежности при переносе вала на позицию сборки усилия основных и дополнительных губок суммируются . 4 ил.
Фиг.З
ФигЛ
| Захват | 1976 |
|
SU568542A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
