Изобретение относится к машиностроению и может быть использовано в качестве захватных устройств промышленных роботов.
Целью изобретения является расширение технологических возможностей путем обеспечения захвата деталей разных размеров.
На фиг. 1 -показано предлагаемое устройство, общий вид; на фиг. 2 - вид А на фиг. 1.
Захватное устройство содержит основание 1, на котором установлены силовой цилиндр 2 и поворачивающийся корпус 3. На корпусе 3 равномерно расположены пары зажимных рычагов 4, образующие зажимной механизм, на приводных концах рычагов имеются ролики 5. Кроме этого на корпусе 3 равномерно установлены дополнительные ролики 6, число которых равно числу пар зажимных рычагов 4. На штоке 7 силового цилиндра 2 установлена вилка 8, взаимодействующая с роликами 5 зажимных рычагов 4 и имеющая подпружиненную собачку 9У которая вместе с роликами 6 образует цевочное зацепление. Корпус 3 относительно основания 1 фиксируется фиксатором 10,
Захватное устройство работает следующим образом.
Избыточное давление подается в бесштоковую полость силового цилиндра 2, шток 7 вместе с вилкой 8 перемещается в крайнее нижнее положение. Вилка 8, действуя на ролики 5, разводит зажимные рычаги 4, При этом собачка 9 заходит за встречный ролик 6. После этого захватное устройство устанавливают над деталью таким образом, чтобы захватывающая деталь оказалась между разведенными рычагами 4, Затем подается избыточное давление в штоковую полость силового цилиндра 2, которое вызывает перемещение штока 7 в крайнее верхнее -положение. При перемещении штока 7
0
5
0
5
0
5
вилка 8 перестает взаимодействовать с роликами 5, и рычаги 4 под действием пружины 11, стремясь сомкнуться, зажимают деталь. При дальнейшем перемещении штока 7 собачка 9, взаимодействующая со встречным роликом 6, стремится переместить его, а вместе с ним поворачивает корпус 3 против часовой стрелки, и последующие зажимные рычаги 4 занимают исходное положение, а корпус 3 при этом фикси- руется относительно основания 1 фиксатором 10. Аналогично происходит захват другими зажимными рычагами 4. Для сброса детали шток 7 опускается в крайнее нижнее положение. При этом зажимные рычаги разводятся и отпускают деталь. Затем при перемещении штока вверх происходит поворот корпуса 3, и следующие зажимные рычаги 4 занимают исходное положение напротив вилки 8 и т.д., пока все рычаги 4 не освободятся от деталей.
Формула изобретения
Захватное устройство, содержащее основание, на котором установлены поворотный корпус и силовой цилиндр привода зажимных механизмов, которые размещены на поворотном корпусе, причем зажимные механизмы выполнены в виде двуплечих рычагов, на концах одних плеч которых расположены ролики, а на других - зажимные губки, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено подпружиненной собачкой, установленной на штоке силового цилиндра, и дополнительными роликами по числу зажимных механизмов, закрепленными на корпусе, причем зажимные механизмы расположены равномерно по окружности с центром, совпадающим с осью поворота корпуса, собачка предназначена для взаимодействия с дополнительными ро- рликами, а на основании установлен подпружиненный фиксатор корпуса.
Вид А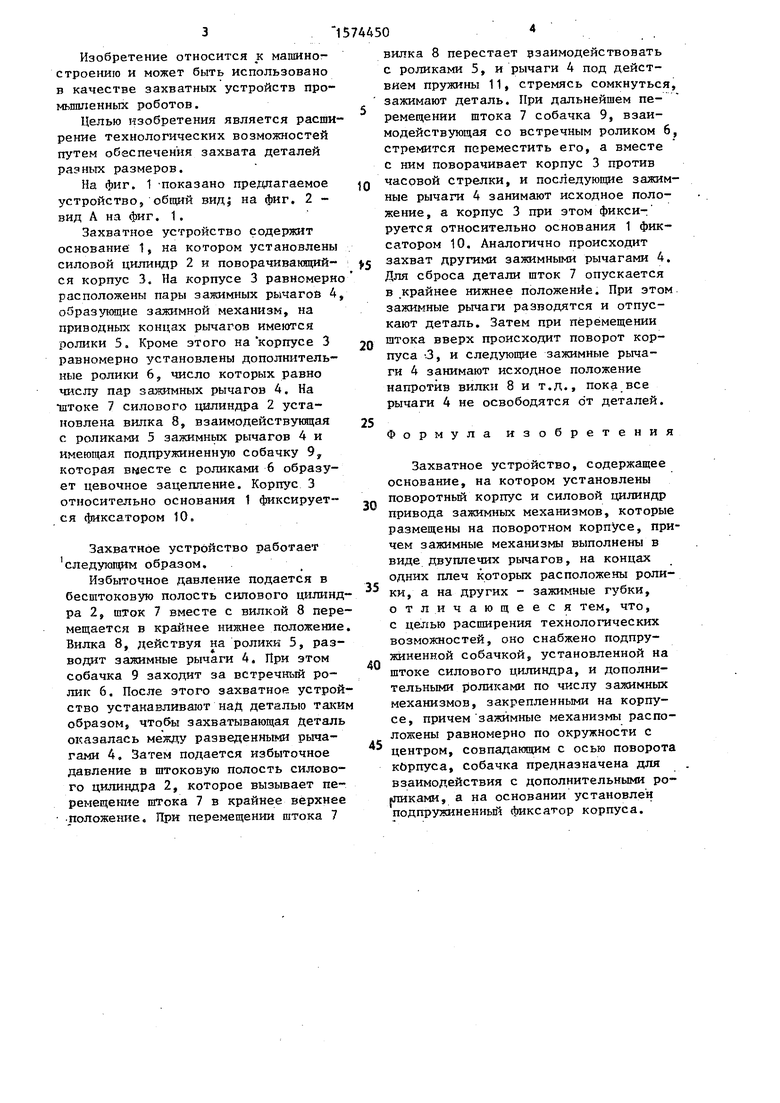
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1991 |
|
SU1813622A1 |
| Захватное устройство | 1986 |
|
SU1430261A1 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| Захватное устройство | 1979 |
|
SU848268A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Модуль для автоматизированной листовой штамповки | 1989 |
|
SU1708477A1 |
| УСТРОЙСТВО ДЛЯ ШАГОВОГО ПЕРЕМЕЩЕНИЯ ДЕТАЛЕЙ | 1992 |
|
RU2042490C1 |
| Полуавтомат для сборки узлов запрессовкой | 1981 |
|
SU986700A1 |
| Манипулятор | 1987 |
|
SU1423368A1 |
| ПОЛУАВТОМАТИЧЕСКАЯ ЛИНИЯ СБОРКИ КАРДАННЫХ ВАЛОВвс?^со;озн^.ПАШи1и-Г..л;';Г'''Б^^БЛИО: ^.•'-' | 1973 |
|
SU366054A1 |

Изобретение относится к области машиностроения и может быть использовано в промышленных работах. Цель изобретения - расширение технологических возможностей. Для работы устройства подается давление в бесштоковую полость цилиндра 2, шток 7 вместе с вилкой 8 перемещается в крайнее нижнее положение. Вилка 8, действуя на ролики 5, разводит зажимные рычаги 4. При этом собачки 9 заходят за встречный ролик 6. После этого устройство устанавливают над деталью так, чтобы захватываемая деталь оказалась между разведенными рычагами 4, давление подается в штоковую полость цилиндра 2 и деталь захватывается зажимными рычагами 4. Для сброса детали шток 7 опускается в крайнее нижнее положение, зажимные рычаги 4 разводятся и отпускают деталь. При подъеме штока 7 производится поворот корпуса 3 относительно основания 1. 2 ил.
Фиг. 2
| Рука манипулятора | 1984 |
|
SU1247265A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
