ел
00
00
4
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Следящий гидропривод дроссельного регулирования | 1974 |
|
SU585320A1 |
| Система управления комплексом электрогидравлических следящих приводов, расположенных на подвижном основании | 1990 |
|
SU1740805A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КОНТРОЛИРУЕМОГО ПАРАМЕТРА ВЫХОДНОГО ЗВЕНА ГИДРОДВИГАТЕЛЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2001 |
|
RU2206804C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Электрогидравлическая следящая система | 1987 |
|
SU1476207A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2125667C1 |
| Электрогидравлическая следящая система | 1979 |
|
SU875334A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
Изобретение относится к области гидроавтоматики и может быть использовано в электрогидравлических следящих системах летательных аппаратов. Целью изобретения является повышение точности за счет уменьшения установившейся ошибки, определяемой нелинейностью характеристик привода. Предварительно определяются граничное значение коэффициента передачи в цепи управления усилителем 3, соответствующее устойчивой работе привода, и величина перепада давления, соответствующая троганию гидродвигателя 4. При подаче входного сигнала на блок 1 датчики 6, 7 измеряют положение выходного элемента привода и перепад давления на гидродвигателе 4. Блок 1 формирует сигнал ошибки путем сравнения входного сигнала и положения выходного элемента, а звено 8 формирует сигнал динамической коррекции, вычитаемой из сигнала ошибки. Одновременно устройством 2 осуществляется сравнение текущего значения перепада давления со значением, соответствующим троганию, и не позднее чем при достижении равенства (т.е. при разнице не более 5%) - уменьшение коэффициента передачи до величины, не превышающей граничного значения.
иг /
Изобретение относится к гидроавтоматике и может быть использовано в электрогидравлнческих следящих системах летательных аппаратов.
Цель изобретения - повышение точности за счет уменьшения установившейся ошибки, определяемой нелинейностью характеристик привода.
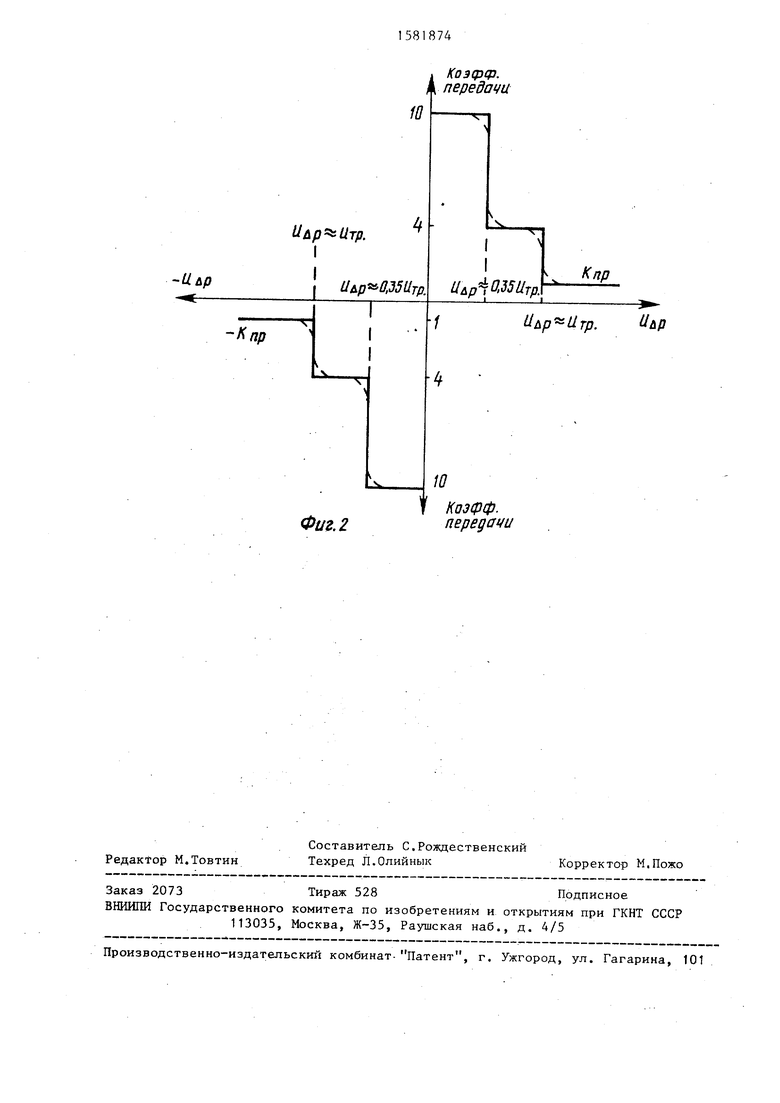
На фиг.1 изображена схема электрогидравлического следящего привода дроссельного регулирования для реализации данного способа управления; на фиг.2 - график изменения коэффициента передачи.
Привод содержит блок 1 формирования сигнала ошибки, управляемое нелинейное усилительное устройство 2, электрогидравлический усилитель 3, исполнительный гидродвигатель 4 с инерционной нагрузкой 5 на выходном элементе (не изображен) привода,датчик 6 положения выходного элемента, датчик 7 перепада давления на гидродвигателе 4 и звено 8 динамической коррекции по перепаду давления.
Способ управления электрогидравлическим следящим приводом дроссельного регулирования осуществляется следующим образом.
При отсутствии входного сигнала на входе блока 1 перепад давления и перемещения гидродвигателя 4 отсутствуют. Предварительными испытаниями или расчетом определяются граничное значение коэффициента К
ЛР
передачи в цепи управления усилителем 3, соответствующее устойчивой работе следящего привода, а также величина перепада давления, соответствующая троганию гидродвигателя 4, т.е. соответствующее значение сигнала UTp датчика 7.
При подаче входного сигнала на блок 1 датчики 6,7 Формируют напряжения Ux и , соответствующие измеряемым положению выходного элемента привода и перепаду давления н гидродвигателе 4, блок 1 Лормирует сигнал ошибки путем сравнения входного сигнала и Лактического положения выходного элемента, а звено 8 формирует сигнал динамической коррекции, вычитаемый из сигнала ошибки. Одновременно устройством 2 осуществляется сравнение текущего значения перепада () давления с знчением UTp, соответствующим троганию, и не позднее чем при достижении равенства (практически при наличии небольшой разности, например, менее 5%, определяемой свойствами элементов привода) - уменьшение коэффициента передачи до величины, не превышающей граничного значения К
соответствующего устойчивой работе следящего привода.
Кроме того, в случае необходимости, уменьшение коэффициента передачи может осуществляться ступенчато,
5 например, при достижении ,3UTp этот коэффициент может быть уменьшен на 60% (Фиг.2).
пр
Формула изобретения
0
Q повышения точности за счет уменьшения установившейся ошибки,определяемой нелинейностью характеристики привода, предварительно определяют величину перепада давления,соответст5 вующую троганию исполнительного гидродвигателя, которую при подаче входного сигнала сравнивают с текущим значением перепада давления, и не позднее, чем при достижении равенстQ ва, уменьшают коэффициент передачи до величины, не превышающей граничного значения, соответствующего устойчивой работе привода.
55
-U &р
It Арбитр. I
,35Итр
-Кпр
Фиг. 2
Коэфф. , передачи
U&p OJSUTp.
Кпр
. U&P
Коэфф. передам
| Электрогидравлическая следящаяСиСТЕМА | 1979 |
|
SU808712A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
