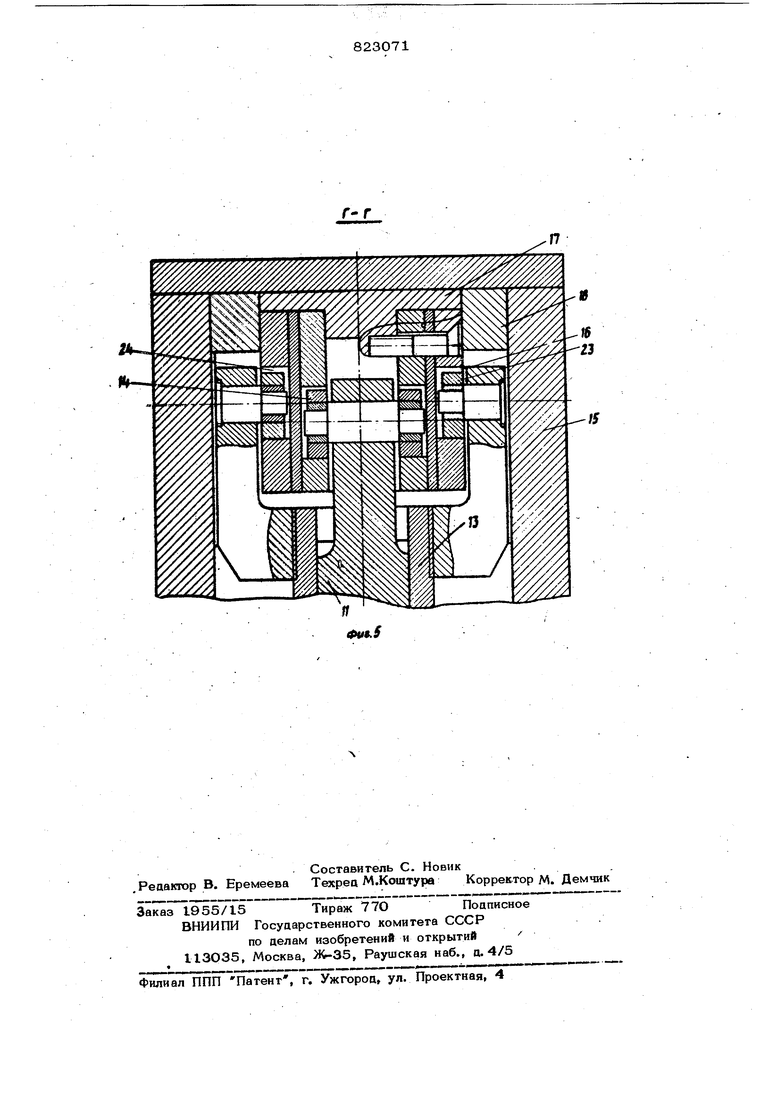
Изобретение относится к манипулягоро строению и предназначено цля автомати зации различных технологических операций. Известен манипулятор, содержащий корпус, подвеску, несущую рычажный за- хваг, устройство ориентации а -талей, вы полненное в виде центрирующего штыря, элемента базирования и силового цилинд кинематически связанного с рычажным захватом pL. Недостаток известного устройства - сложность конструкции и значительные габариты., 11ель изобретения - упрощение консгру ции и уменьшение габаритов. Поставленная цель достигается тем, что манипулятор снабжен расположенными соответственно в подвеске направляющей а в корпусе - полой штангой, на конце которой имеется опорная шайба, а также ползуном, кинематически связанным с силовым цилиндром и установленным в направл5Пощих, причем центрирующий шты смонтирован в полой штанге, и оба они снабжены роликами, а в ползуне выпо/Н нены копирные пазы под эти ролики. На . 1 изображен предлагаемый ма пулятор, о&цйй вид-, на фиг. 2 - сечение А-А на фиг. I; на ф1Г. 3 - раЗрез Б-Б на фиг. I; на . 4 - вид В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 3. Манипулятор содержит подвеску I и узлы ее ориентации, состоящие из расположенной на горизонтальных направляющих 2 каретки 3 с приводом 4, осуществляющей горизонтальные перемадения подвески 1, и размещенного на каретке 3 сило вого цилиндр 5 вертикального перемацения, на шгоке которого установлена эта подвеска. Скалки, 6 служат направляющими при вертикальном перемещении подвески 1. В магазине 7 расположены детали 6, подлежащие переносу на загрузочную позицию 9, а из загрузочной позиции - в магазин 10. 382 Поцвескз I несет рычажные захваты, в каждом из которых имеется устройство ориентации деталей, содержащее центрирующий штырь II, кинематически связанный с силовым цилинцром 12. Центрирующий штырь 11 размещен в полой штанге 13 и снабжен роликом 14. Корпус 15 прикреплен к попвеске I, ролики 14 установлены в копирном пазу 16, выполненном на ползуне 17. Ползун имеет коробчатую форму и установлен в направлялсмией 18 и кинематически связан с силовым цилиндром 12. Элемент базирования деталей выполнен в виае шайбы 19, закрепленной к корпусу 15 соосно с центрирующим штырем 11. Рычажный захват образован установленными на корпусе 15 поворотными двуплечими рычагами 20, одно плечо каждого из которых пружиной 21 поджато к торцу шайбы 22, установленной на конце полой штанги 13. Другой конец полой штанги 13 имеет установленные на нем ролики 23,взаи МО действующие со вторым копир- ным пазом 24, выполненным на наружно стороне стенок коробчатого ползуна 17. Манипулятор работает следующим образом. От привода 4 каретка 3 перемещается по траверсе 2 до тех пор, пока один из корпусов 15 не окажется против одной из деталей 8, расположенньис в магазине 7, а другой - над позицией 9 сзагру4ки. Затем/цилиндр 5 опускает подвеску I до упора шайбы 19 в деталь 8. Силовым цилиндром 12 ползун 17 перемещается по направляющей 18, при этом ролики 1 взаимодействуя с копирным пазом 16 ползуна, смещают центрирующий штырь II относительно полой штанги 13 вниз, вводя его в отверстие детали 8. . Одновременно с этим ролики 23, взаимодействуя вторым копирным пазом 24,перемещают установленную в корпусе 15 полую штангу 13 в сторону, противоположную перемещению центрирующего штыря 11. 14 При перемещении полой штанги 13 шайба 22, установленная на ее конце, преодолевая усилие пружин 21, поворачивает рычаги 20, которые захватывают деталь 8. После того, как детали, находящиеся в магазине 7, и деталь, обработанная на загрузочной позиции 9, захвачены рычагами 2О, подвеска I поднимается вместе с ними, а каретка 3 перемещается влево. Каретка останавливается в момент, когда рычаги 2О с обработанной деталью расположатся против позиции разгрузки, а рычаги 2О с необработанной деталью против позиции загрузки. В этом положении подвески 1 происходит ее опускание вниз, необработанная устанавливается на стол станка, а обработанная деталь в магазин 10 разгрузочной позиции. Формула изобретения Манипулятор, содержащий корпус, подвеску, несущую рычажный захват, устрой- ство ориентации деталей, выгюлненное в виде центрирующего штыря, элемента базирования и силового цилиндра, кинематически связанного с рычажным захватом, отличающийся тем, что, с целью упрощения конструкции и уменьшения габаритов, он снабжен расположенными в подвеске направляющей, а в корпусеполой штангой, на конце которой имеется опорная шайба, а также ползуном, кийематически связанным с силовым цилиндром и установленным з направляющих, причем центрирующий штырь смонтирован в полой штанге, оба они снабжены роликами, а в ползуне вьшолнены копирные пазы под эти ролики. Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР № 582944, кл. В 23 Q 7/04, 1976.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи штучных заготовок в рабочую зону пресса | 1989 |
|
SU1706764A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Манипулятор для автоматической смены инструментов | 1986 |
|
SU1393578A1 |
| Схват манипулятора | 1988 |
|
SU1585146A1 |
| Устройство для установки и крепления изделия под сварку | 1985 |
|
SU1303349A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Устройство для одновременной сварки двух угловых или нахлесточных швов | 1974 |
|
SU647088A1 |
| Линия для изготовления и сборки грифов музыкальных инструментов | 1983 |
|
SU1169013A1 |
| Манипулятор | 1987 |
|
SU1423368A1 |


I J
/
Llii 6- Б
Вид В Фиг.3
i
20
Фиг.4
Фил. 5
