-4.4..9.Q.p:;;gjл-v:
Фиг.1
: Изобретение относится к конвейерном:у |гранспорту, используемому в машинострое- iiHH.
Целью изобретения является упрощение конструкции и расширение технологических возможностей путем обеспечения останова тележек на любом участке трассы.
На фиг. 1-4 изображен грузоведущий конвейер с различными положениями дву(к другой тележке). В этом случае необходимо перемещать тяговый орган 10 в направлении Б до тех пор, пока передние (по ходу движения) концы 13 захвата 11 5 не пройдут между горизонтальными плечами рычагов 4. При этом упругие плечи захвата сдвигаются и захват И встает в положение, показанное на фиг. 2. После этого следует изменить направление движеплечих рычагов тележки.
г- „ , ния ТЯГОВОГО органа на противоположное,
рж к ГГаГвлеТГ: вГо ГстТю :: захва а П попадет в выемки 9
емещени я по неподвижным направляющимР,- . „ LKO H ГГиап р :
Мнапример, с помощью роликовых опор). J д Переместив тележку 1
На каждой тележке 1 имеется по две гори-„ необходимое расстояние, нужно изменить
зонтальных оси 3, расположенных относитель- реверсивным приводом (не изображен) нано друг друга в вертикальной плоскости.Крав пение движения тягового органа 10
На осях 3 установлены симметрично и с .-, Ш
на противоположное. При этом концы 12
возможностью совместного поворота одинако- i- .
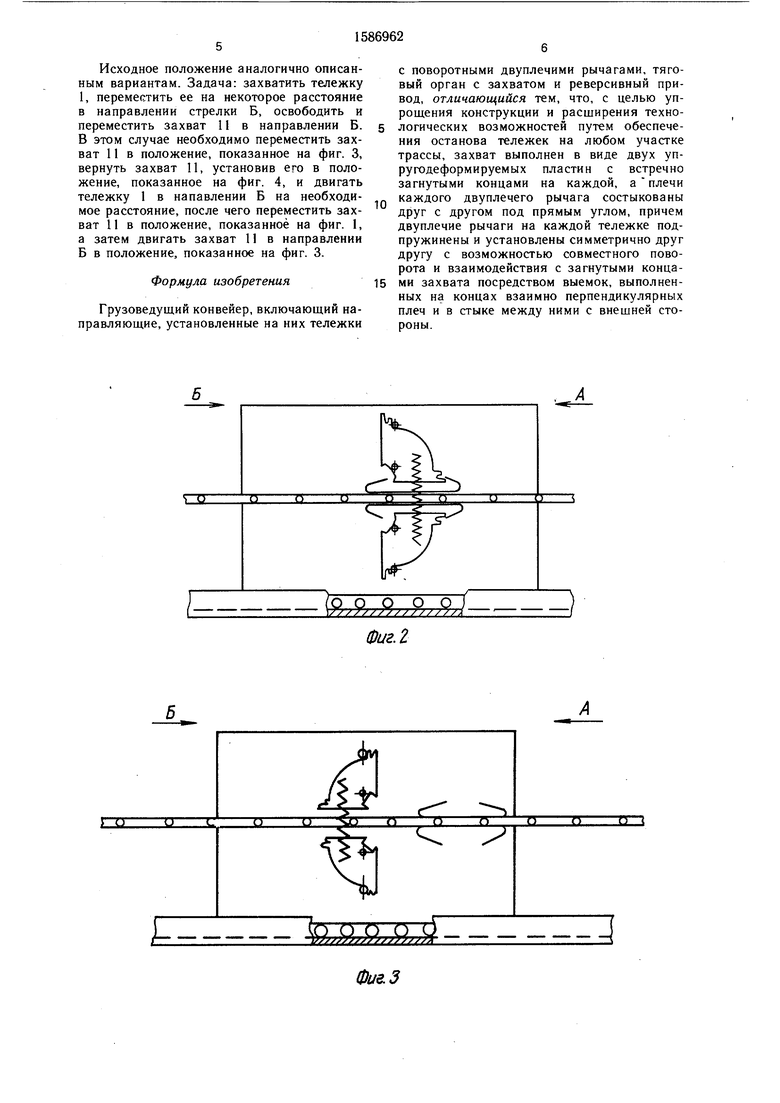
вые двуплечие рычаги 4, при этом их поворот ограничивается упорами 5, закрепленнызахвата 11 попадают в выемки 8 рычагов 4
и происходит поворот рычагов 4 относиpv.. ..ро.„п„о....,.,..р..,.., .огчр.и.-.ппс. .. 3 рычаги 4 встают в поломи на тележке 1. Упоры о установлены так,20 показанное на фиг. 3, захват 11 что при соприкосновении одного из плеч Двуплечих рычагов 4 с упором 5 второе плечо находится в горизонтальном положении. На каждом двуплечем рычаге 4 установлены по одной оси 6, соединяемых - --г
друг с другом пружиной 7. Таким образом, варианту. Задача: захватить тележку 1,
двуплечие рычаги 4 имеют два фиксиро-переместить ее на некоторое расстояние
ванных положения: плечами вправо или пле- направлении стрелки Б, освободить и
чами влево.переместить захват 9 в направлении стрелПлечи каждого двуплечего рычага 4 сое- А.. В этом случае необходимо перетыкованы друг с другом под прямым углом30 тяговый орган 10 в направлении Б
фиг.
освобождает тележку и получает возможность движения в направлении Б.
Исходное положение аналогично первому
до тех пор, пока захват 11 не пройдет между горизонтальными плечами рычагов 4 и не повернет их в положение, показанное на фиг. 3. После этого необходимо изменить направление движения тягового органа на
и имеют в этом стыке с внешней стороны выемки 8. На концах плечей двуплечего рычага 4 выполнены выемки 9.
Тяговый орган 10 конвейера представляет собой тяговую цепь либо перфориродо тех пор, пока захват 11 не пройдет между горизонтальными плечами рычагов 4 и не повернет их в положение, показанное на фиг. 3. После этого необходимо изменить направление движения тягового органа на
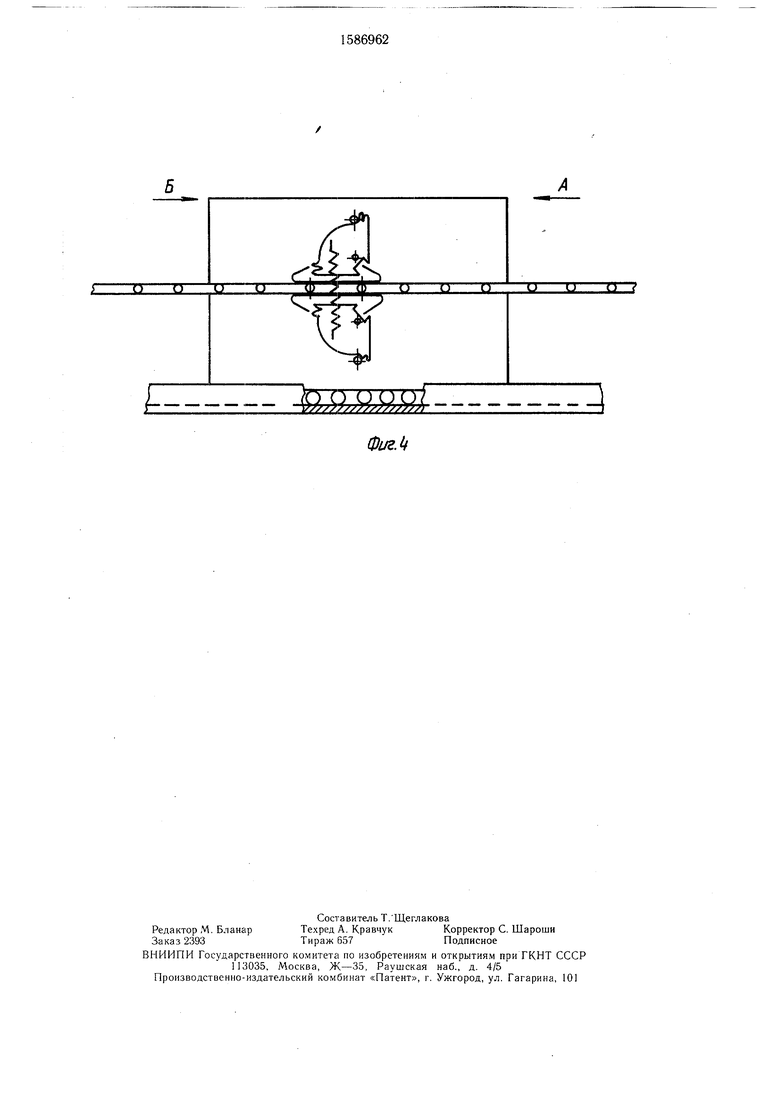
ванную металлическую ленту, проходящую35 противоположное, снова провести захват 11 горизонтально и симметрично относительномежду рычагами 4, остановить его в поло- двуплечих рычагов 4. На тяговом органеженки, показанном на фиг. 4, вновь из- 10 симметрично относительно друг друга за-менить направление движения тягового ор- креплены две упругодеформированные плас-гана, и перемещать захваты с кареткой тины в виде захвата 11 с встречно заг- а требуемое расстояние в направление Б. нутыми концами 12 и 13, расстояние меж-40 Когда тележка 1 оказывается в необходи- ду которыми больше длины плеч двупле-мой точке своей траектории, нужно остано- чих рычагов 4. Расстояние по верти кали между выемками 8 горизонтальных плеч двуплечих рычагов 4 равно расстоянию
между выемками 9 и равно расстоянию
вить тяговый орган и начать движение захвата 11 в направлении А. В этом случае захват 11 поворачивает рычаги 4, которые снова становятся в положение, показанное
,,и IJIV- .УЧIJfA Llll JL/CiWlW/iriiTl AC- ...---..... mj i.iu-v..,, 11и11.| ъ | а11дху-1
между концами 12 и 13 захватов F1 в фиг. 1 освободит тележку 1 и полудеформированном их состоянии. Конвейерчит возможность беспрепятственного движе- имеет реверсивный привод.
ния в направлении А.
Грузоведущий конвейер работает следующим образом. (Рассматривают четыре основ- ных возможных варианта работы конвейера).
В исходном положении тяговый орган 10 с захватами 11 и рычаги 4 на тележке I находятся в положении, показанном на фиг. 1. Задача: захватить тележку 1, пе- реместить ее на некоторое расстояние в направлении стрелки А, освободить и переместить захваты 11 в направлении стрелки Б
(к другой тележке). В этом случае необходимо перемещать тяговый орган 10 в направлении Б до тех пор, пока передние (по ходу движения) концы 13 захвата 11 не пройдут между горизонтальными плечами рычагов 4. При этом упругие плечи захвата сдвигаются и захват И встает в положение, показанное на фиг. 2. После этого следует изменить направление движе д .. 3 рычаги 4 встают в поло показанное на фиг. 3, захват 11 - --г
варианту. Задача: захватить тележку 1,
фиг.
освобождает тележку и получает возможность движения в направлении Б.
Исходное положение аналогично первому
тяговый орган 10 в направлении Б
до тех пор, пока захват 11 не пройдет между горизонтальными плечами рычагов 4 и не повернет их в положение, показанное на фиг. 3. После этого необходимо изменить направление движения тягового органа на
противоположное, снова провести захват 11 между рычагами 4, остановить его в поло- женки, показанном на фиг. 4, вновь из- менить направление движения тягового ор- гана, и перемещать захваты с кареткой а требуемое расстояние в направление Б. Когда тележка 1 оказывается в необходи- мой точке своей траектории, нужно остано-
вить тяговый орган и начать движение захвата 11 в направлении А. В этом случае захват 11 поворачивает рычаги 4, которые снова становятся в положение, показанное
- ...---..... mj i.iu-v..,, 11и11.| ъ | а11дху-1
а фиг. 1 освободит тележку 1 и получит возможность беспрепятственного движе-
ния в направлении А.
Исходное положение аналогично описанным вариантам. Задача: захватить тележку 1, переместить ее на некоторое расстояние в направлении А, освободить и переместить захват 11 в направлении А. В этом случае необходимо переместить захват 11 в положение, показанное на фиг. 2, двигать тележку в направлении А, переместить захват в положение, показанное на фиг. 3 и вернуть захват 11 в положение, показанное на фиг. 1.
Исходное положение аналогично описанным вариантам. Задача: захватить тележку 1, переместить ее на некоторое расстояние в направлении стрелки Б, освободить и переместить захват 11 в направлении Б. В этом случае необходимо переместить захват 11 в положение, показанное на фиг. 3, вернуть захват 11, установив его в положение, показанное на фиг. 4, и двигать тележку 1 в напавлении Б на необходимое расстояние, после чего переместить захват 11 в положение, показанное на фиг. 1, а затем двигать захват 11 в направлении Б в положение, показанное на фиг. 3.
Формула изобретения
Грузоведущий конвейер, включающий направляющие, установленные на них тележки
с поворотными двуплечими рычагами, тяговый орган с захватом и реверсивный привод, отличающийся тем, что, с целью упрощения конструкции и расщирения технологических возможностей путем обеспечения останова тележек на любом участке трассы, захват выполнен в виде двух уп- ругодеформируемых пластин с встречно загнутыми концами на каждой, а плечи каждого двуплечего рычага состыкованы друг с другом под прямым углом, причем двуплечие рычаги на каждой тележке подпружинены и установлены симметрично друг другу с возможностью совместного поворота и взаимодействия с загнутыми концами захвата посредством выемок, выполненных на концах взаимно перпендикулярных плеч и в стыке между ними с внешней стороны.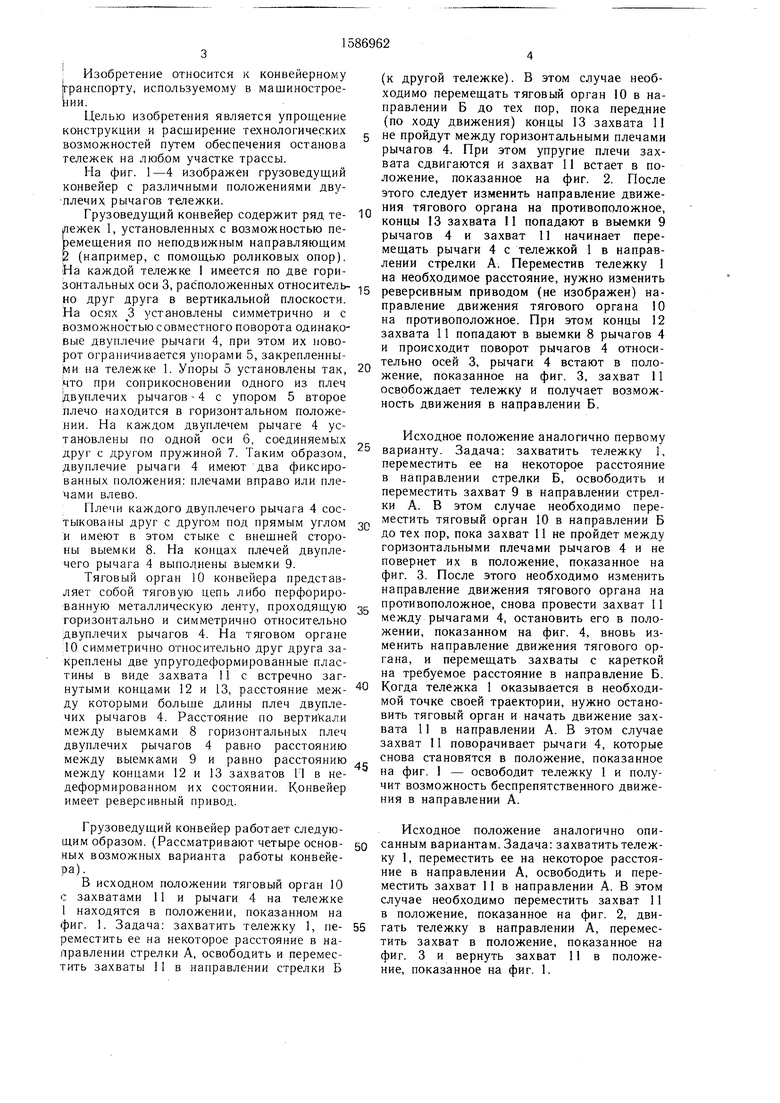
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Устройство для перемещения транспортного средства | 1990 |
|
SU1791213A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1364565A1 |
| Тележечный конвейер | 1985 |
|
SU1276577A2 |
| Устройство для возведения стоечной крепи в очистном забое | 1985 |
|
SU1312178A1 |
| Подвесной толкающий реверсивный конвейер | 1988 |
|
SU1818286A1 |
| ГРУЗОВАЯ ТЕЛЕЖКА ДЛЯ ПОДВЕСНОГО ТОЛКАЮЩЕГТГ—-'КОНВЕЙЕРА | 1972 |
|
SU327098A1 |
| Тележечный конвейер | 1979 |
|
SU870273A1 |
| Конвейер для распределения грузов | 1984 |
|
SU1273317A1 |
Изобретение относится к конвейерному транспорту и позволяет упростить конструкцию и расширить технологические возможности конвейера путем обеспечения останова тележек (Т) 1 на любом участке трассы. На направляющих 2 конвейера установлены Т 1 с поворотными подпружиненными пружиной 7 двуплечими рычагами (ДР) 4. Плечи каждого ДР 4 состыкованы друг с другом под прямым углом. Установлены ДР 4 симметрично друг другу с возможностью совместного поворота и взаимодействия с загнутыми концами захватов 11 тягового органа 10 конвейера посредством выемок 9 и 8. Последние выполнены на концах взаимно перпендикулярных плеч ДР 4 и в стыке между ними с внешней стороны соответственно. Каждый захват 11 выполнен в виде двух упруго деформируемых пластин с встречно-загнутыми концами 12 и 13 на каждой. При изменении с помощью реверсивного привода направления движения тягового органа 10 концы 12 и 13 захватов 11 попадают в выемки 8 или 9 ДР 4 или выходят из них. При этом захваты 11 перемещают Т 1 на требуемое расстояние и освобождает ее. 4 ил.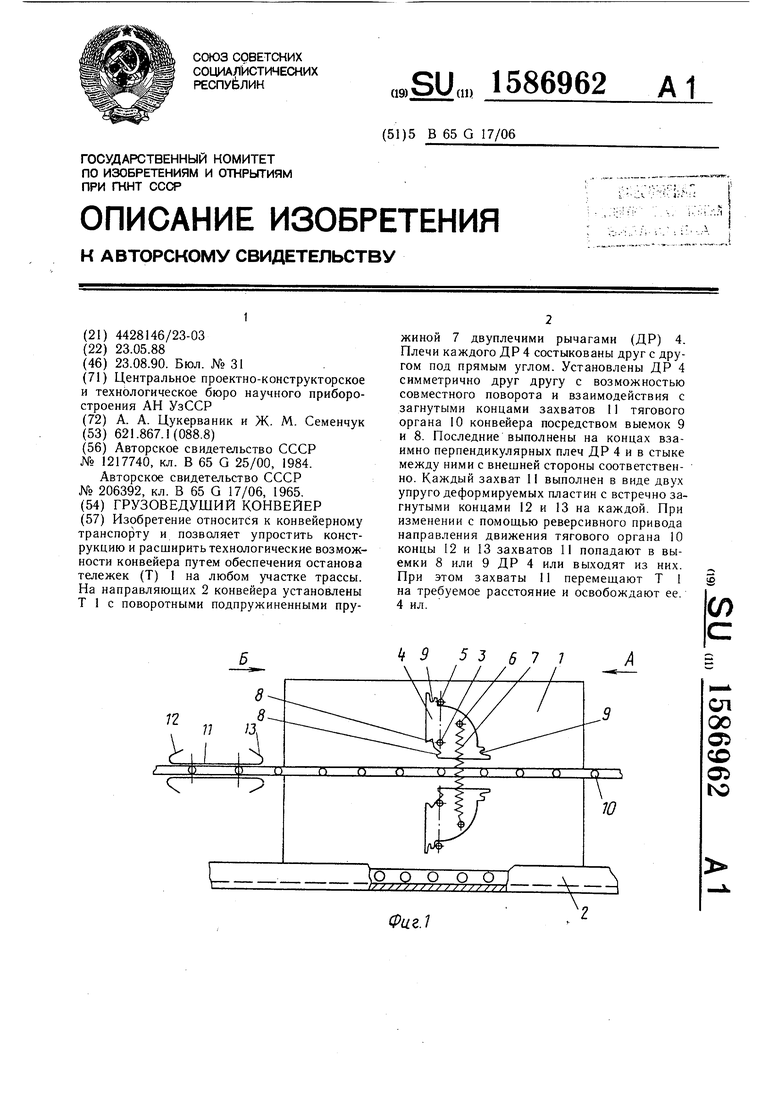
и:
:л
О О О О о
/Х///////7
-хо .
Г
о о о ОС
PS
S
::5
,
а
О О о
/Х///////77
)
ф1/г.2
1
а.--Ф1 г.3
си и
IjTTTj g go/ .1
j XX /XX/X /xWX//X//y I
f
.
| Напольный грузоведущий конвейер | 1984 |
|
SU1217740A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| ВЕРТИКАЛЬНО-ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 0 |
|
SU206392A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
