Фиг.з
ти применение в пп.. t/j с 2, g осевом направленнн зубья удермыоменност автоматизация и жнваются подвнжным пальцем 22, устанонцель изооретеиняленной в отверстие втулки и подпружиненмеханнзация процесса. „,. , „„вом направлении пружиной 23.
rK™S .:- ; ™ . Г.ьГв в.
Гс ое ГсГД-Ло и / - |а р; ;ГГрГЖор,усовоаес.
сТ с1гог о.ЪтнГПеГт оЬо
;;1л Гр°е«Гня тГ°:оТГн -°ва рки Мо7кТ коГп-уГс
™ 1Т Ж Гн Грп Га Геи аЕГГт н-Га 2вГп : в-вГrilE Va ГГз1в Т - о7и- а 1ГГ
EHr% i зуТеТ и Г оГти-Sy LJ тво 10 по дачи корпуса метчи-ми „редусмотрена регулировка призматичесL в захватное устройство при нахожде-«° у 7нГв;Гр та с1е д° ;:ц,™ образом.
мёх°а™чес каяр;ка 7 установлена в иод. Зубья вручную укладываются в двухшниниках на каретке И. имеюшеа возврат-лотковый в °РИ™
ио-поступательное перемещение посредствомтированиом °/ .f „ ™те
снлового цнлиидра 12 в цилиндрическихсобственного веса опускаются до питате
направ яющнх 13%акреиленных на раме 6.ля 26, который зХв
Такое движение необходимо для остановле-35 «У ВЬ ИЧУ Той™ 8 механической ру
иия свариваемой заготовки после ее ежа-в захватное устройство 8
тня подачей сварочного импульса тока. Наки. Корпуса
-ГМ я . яТ-О- :гг1 0 5i Ег;од-. ™-- - .о1ггит;.
ке ГпГо р ГнГэХо Р 5„.. рзбо™ установки осу.ес.зляе.ся
ки ГхГнГо Т;%Г.;а ГпеТвГ П„ГГ, Г.я ГвижеГе о. ..ока
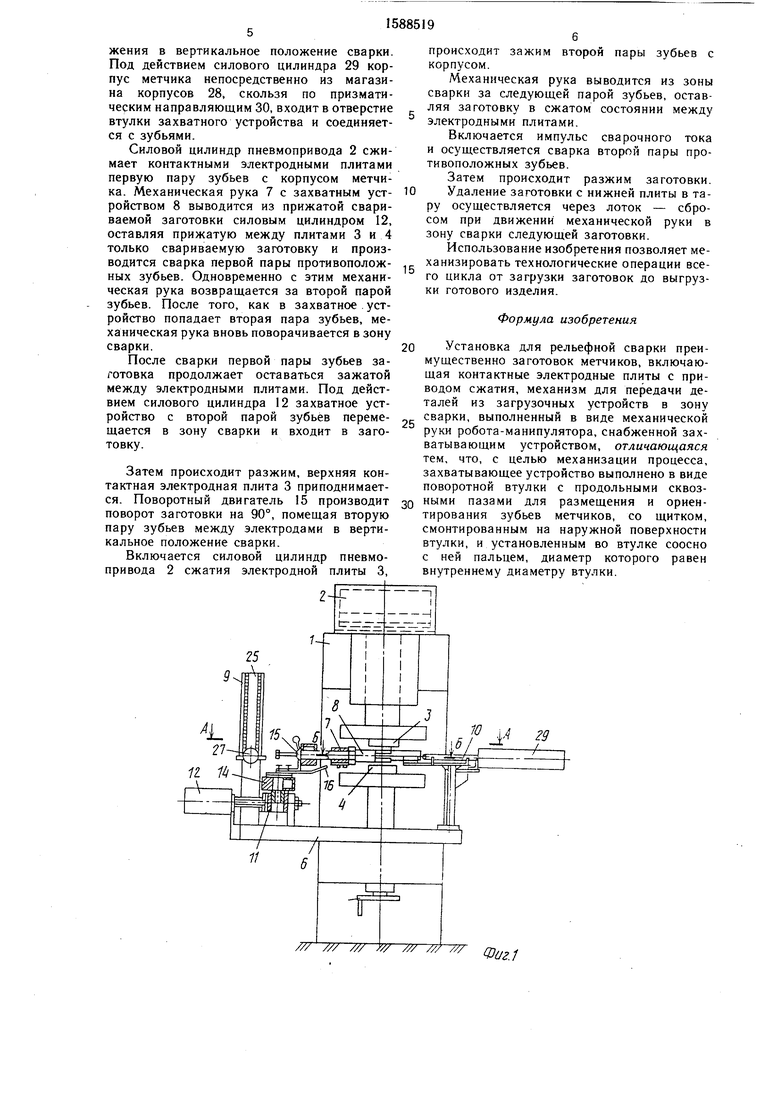
зубьев на механиТкой руке закреплен в то-силового цилиндра 27 переносит первую
рой поворотный двигатель 15.пару противопрложнь,х зубьев метчика в захПодвеска захватного устройства на плос-ватное устройство 8
кой пружине 16 позволяет компенсироватьгде они фиксируются в пазах и удержинеточТо сть изготовления, расположения по-во ваются от выпадания усилием прижима плосверхностей свариваемых деталей и обеспе-кой пружины 20 к пальцу 22. „,,й
равномерное распределение усилия. поворотный двигатель 14 и силовой
Захватное устройство 8 для поворота, цилиндр 12 переносит первую пару зубьев
фиксации и сборки с корпусом привари-с захватным устройством в зону сварки
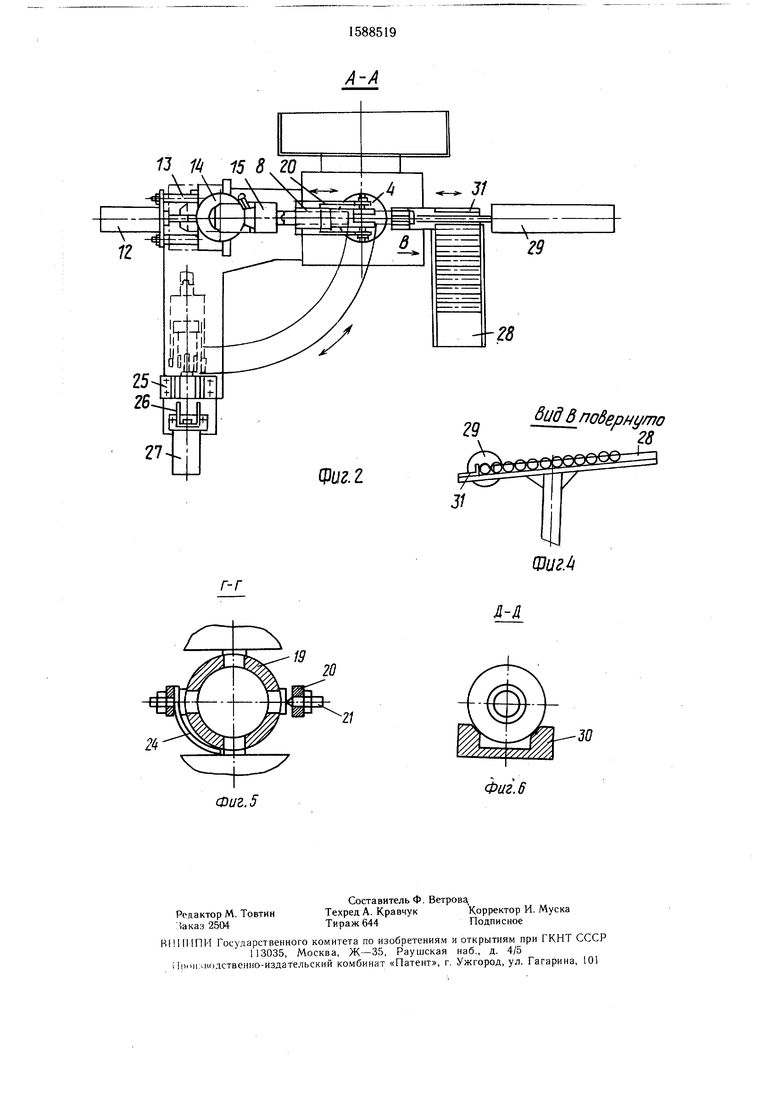
ваемых зубьев состоит из поворотного вмежду контактными РО „вао
подшипниках шпинделя 17, на корпусе55 нижней 4. После поворота, в зои сваркоторого закреплена накидной гайкой 18, ки другой поворотный двигатель 15 произсменная (соответственно размеру сваривае-водит поворот захватного устройства с зубья
мой заготовки метчика) втулка 19 с че-ми на 90 В результате, свариваемая пара
тырьмя продольными пазами по окруж-зубьев переходит из горизонтального положения в вертикальное положение сварки. Под действием силового цилиндра 29 корпус метчика непосредственно из магазина корпусов 28, скользя по призматическим направляющим 30, входит в отверстие втулки захватного устройства и соединяется с зубьями.
Силовой цилиндр пневмопривода 2 сжимает контактными электродными плитами первую пару зубьев с корпусом метчика. Механическая рука 7 с захватным устройством 8 выводится из прижатой свариваемой заготовки силовым цилиндром 12, оставляя прижатую между плитами 3 и 4 только свариваемую заготовку и производится сварка первой пары противоположных зубьев. Одновременно с этим механическая рука возвращается за второй парой зубьев. После того, как в захватное . устройство попадает вторая пара зубьев, механическая рука вновь поворачивается в зону сварки.
После сварки первой пары зубьев заготовка продолжает оставаться зажатой между электродными плитами. Под действием силового цилиндра 12 захватное устройство с второй парой зубьев перемещается в зону сварки и входит в заготовку.
Затем происходит разжим, верхняя контактная электродная плита 3 приподнимается. Поворотный двигатель 15 производит поворот заготовки на 90°, помещая вторую пару зубьев между электродами в вертикальное положение сварки.
Включается силовой цилиндр пневмопривода 2 сжатия электродной плиты 3,
происходит зажим второй пары зубьев с корпусом.
Механическая рука выводится из зоны сварки за следующей парой зубьев, остав- ляя заготовку в сжатом состоянии между электродными плитами.
Включается импульс сварочного тока и осуществляется сварка второй пары противоположных зубьев.
Затем происходит разжим заготовки. 0 Удаление заготовки с нижней плиты в тару осуществляется через лоток - сбросом при движении механической руки в зону сварки следующей заготовки.
Использование изобретения позволяет ме- ханизировать технологические операции всего цикла от загрузки заготовок до выгрузки готового изделия.
Формула изобретения
0 Установка для рельефной сварки преимущественно заготовок метчиков, включающая контактные электродные плиты с приводом сжатия, механизм для передачи деталей из загрузочных устройств в зону сварки, выполненный в виде механической руки робота-манипулятора, снабженной захватывающим устройством, отличающаяся тем, что, с целью механизации процесса, захватывающее устройство выполнено в виде поворотной втулки с продольными сквоз0 ными пазами для размещения и ориентирования зубьев метчиков, со щитком, смонтированным на наружной поверхности втулки, и установленным во втулке соосно с ней пальцем, диаметр которого равен внутреннему диаметру втулки.
5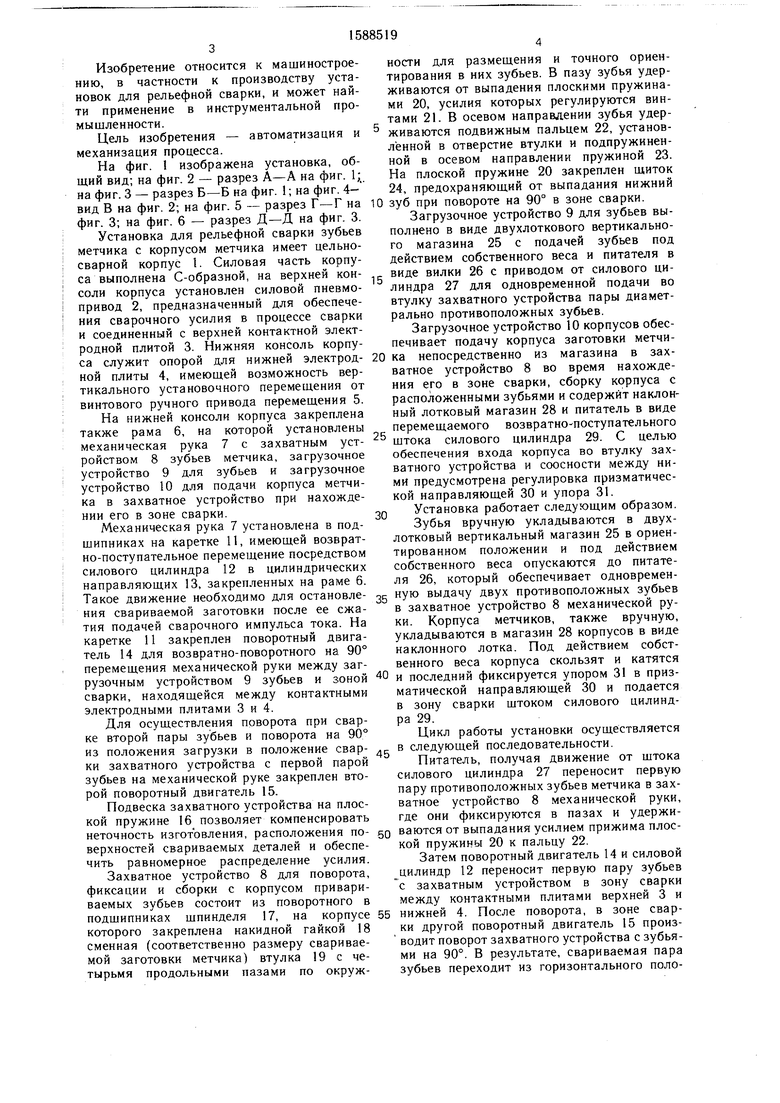
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гибки обечаек из листовых заготовок | 1978 |
|
SU770609A2 |
| Машина для многоточечной контактной сварки | 1986 |
|
SU1368134A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Электродное устройство для контактной точечной сварки | 1988 |
|
SU1648682A1 |
| Устройство для сборки под сварку | 1978 |
|
SU766806A1 |
| Устройство для сборки и дуговой сварки металлоконструкций | 1978 |
|
SU789262A1 |
| МАШИНА ДЛЯ ШОВНОЙ СВАРКИ | 1969 |
|
SU238035A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Машина для контактной стыковой сварки | 1977 |
|
SU662306A2 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
Изобретение относится к сварке и может найти применение в инструментальной промышленности при изготовлении метчиков. Цель изобретения - механизация процесса. Корпус метчика устанавливается на позиции сварки во втулке 19, внутренний диаметр которой равен диаметру корпуса. Втулка 19 выполнена с четырьмя продольными сквозными пазами, в которые устанавливаются зубья метчика. В пазах зубья удерживаются от выпадания плоскими регулируемыми пружинами. В осевом направлении зубья удерживаются подпружиненным пальцем 22. Зуб, находящийся в нижнем положении, удерживается от выпадания щитком. Изобретение позволяет механизировать процесс сварки метчика с четырьмя зубьями на протяжении всего цикла от загрузки деталей до выгрузки готового изделия. 6 ил.
25
9
/// /// /// //у /// /// ///
иг.1
20
2
Фиг, 5
ЦЗигМ
Фаг. 6
| Белянин П | |||
| Н Промышленные роботы | |||
| М.: Машиностроение, 1975, с | |||
| РЕЛЬСОВАЯ ПЕДАЛЬ | 1920 |
|
SU289A1 |
