Изобретение относится к вычислительной технике, а именно к системам для контроля и диагностики цифровых узлов в процессе их производства и ремонта.
Цель изобретения - повышение достоверности контроля за счет оперативного изменения частоты выдачи тестовых воздействий и повышение производительности системы при локализации сложных отказов . цифровых узлов.
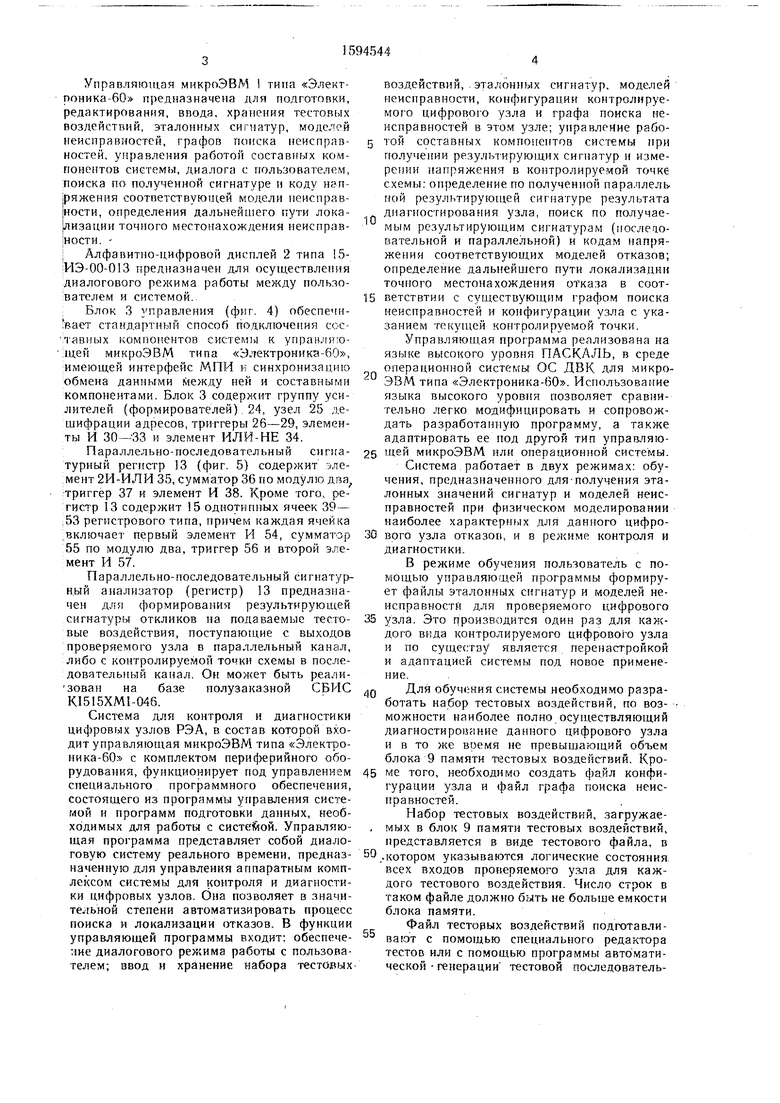
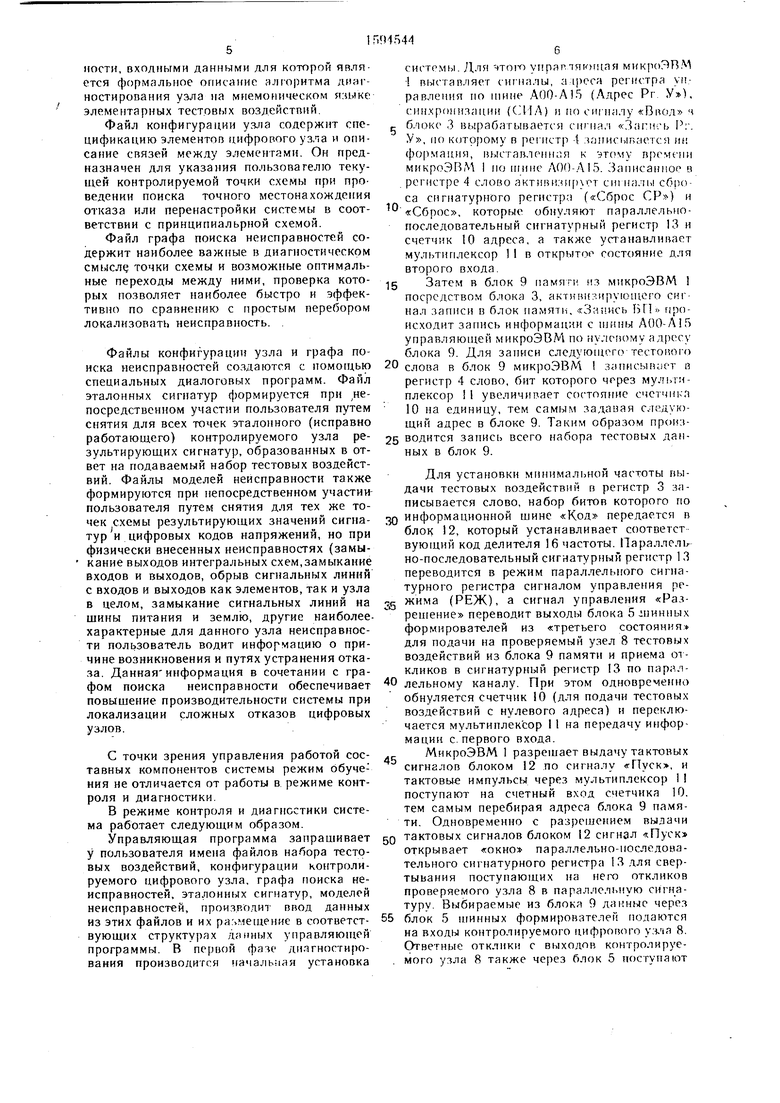
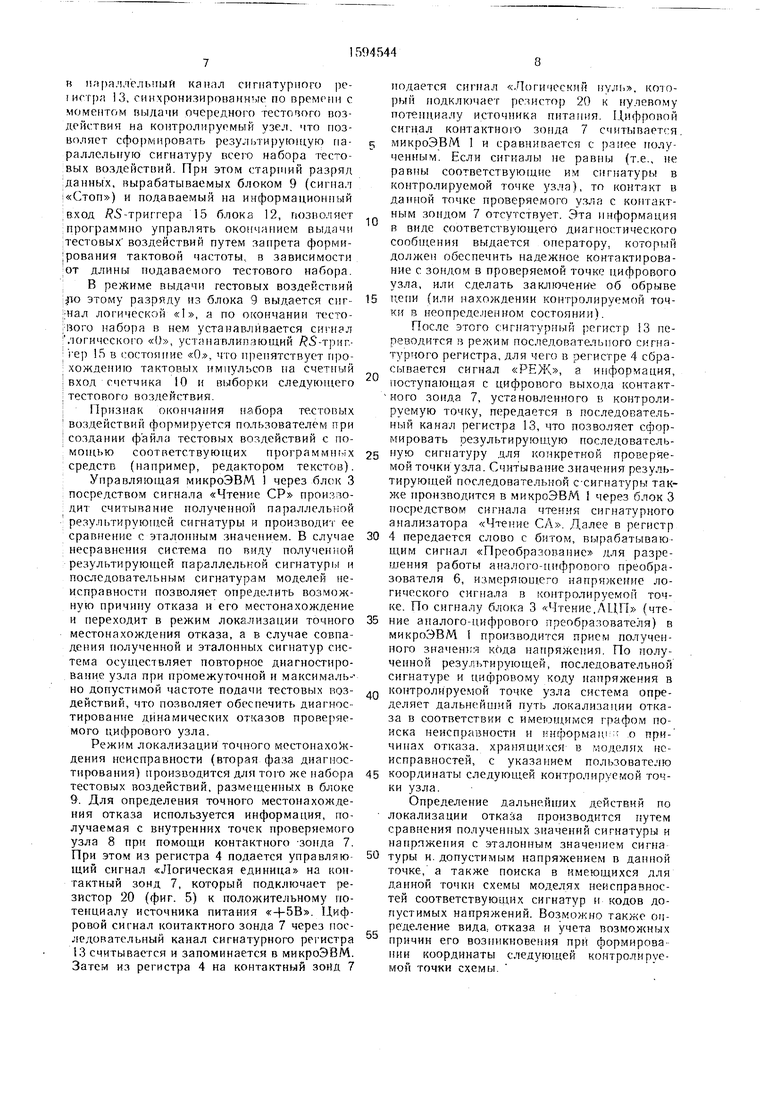
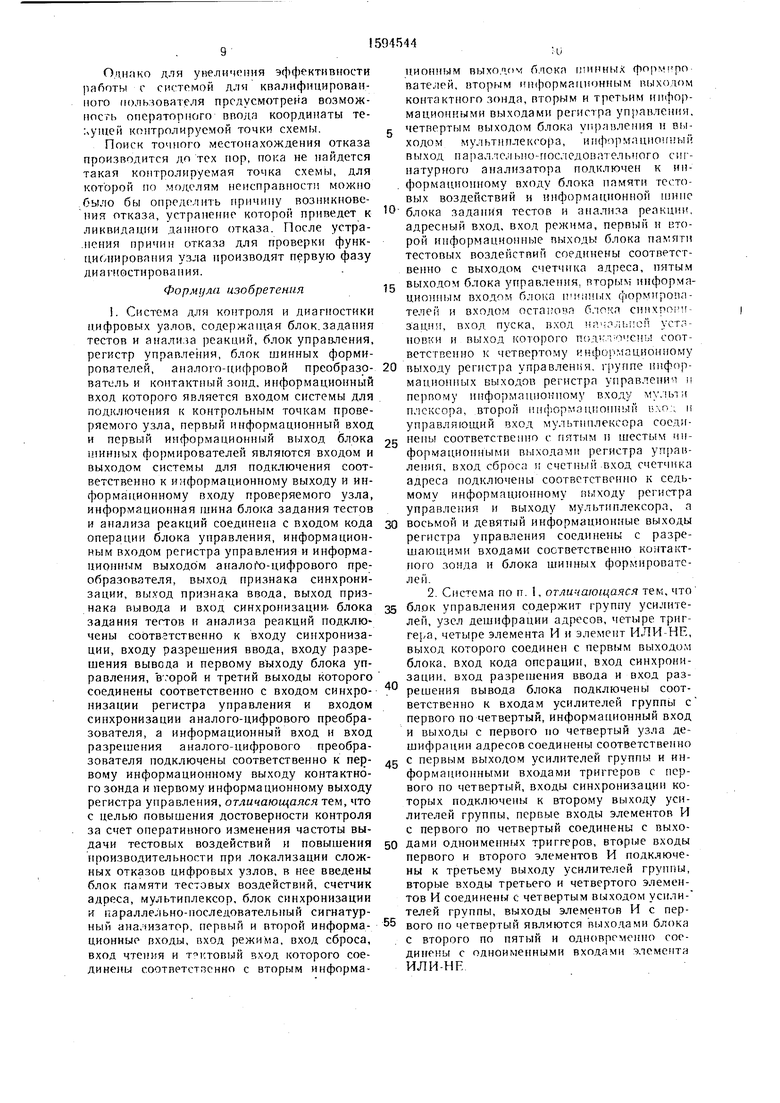
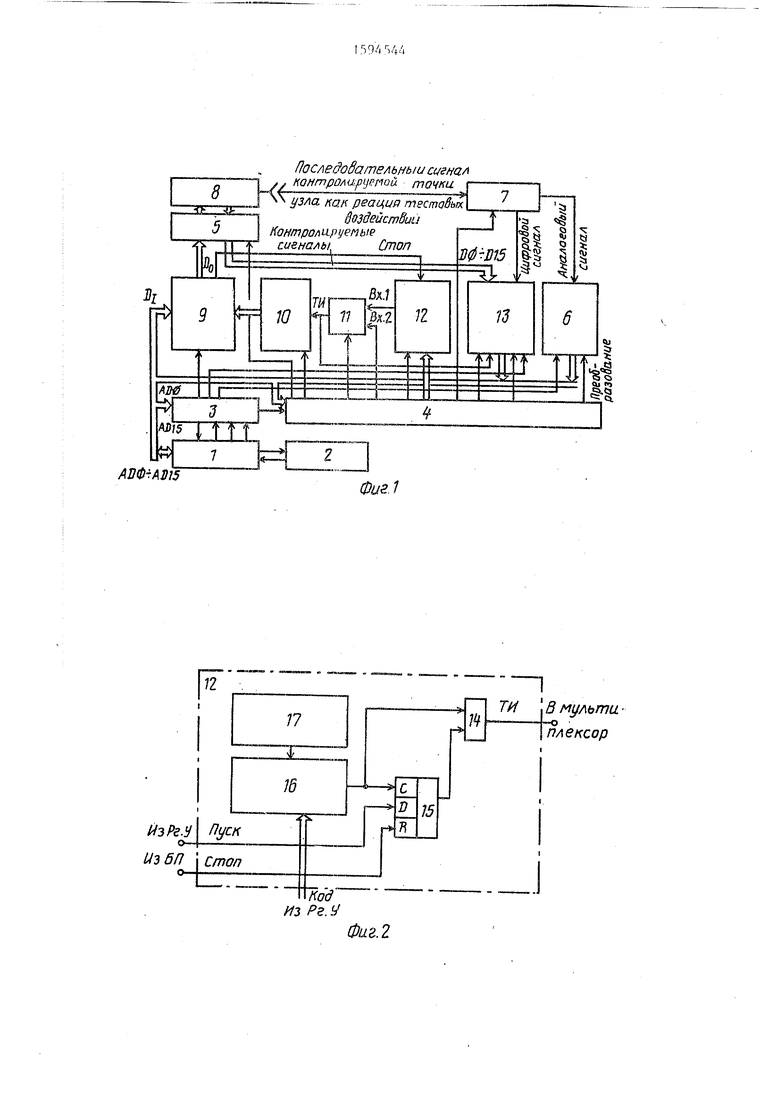
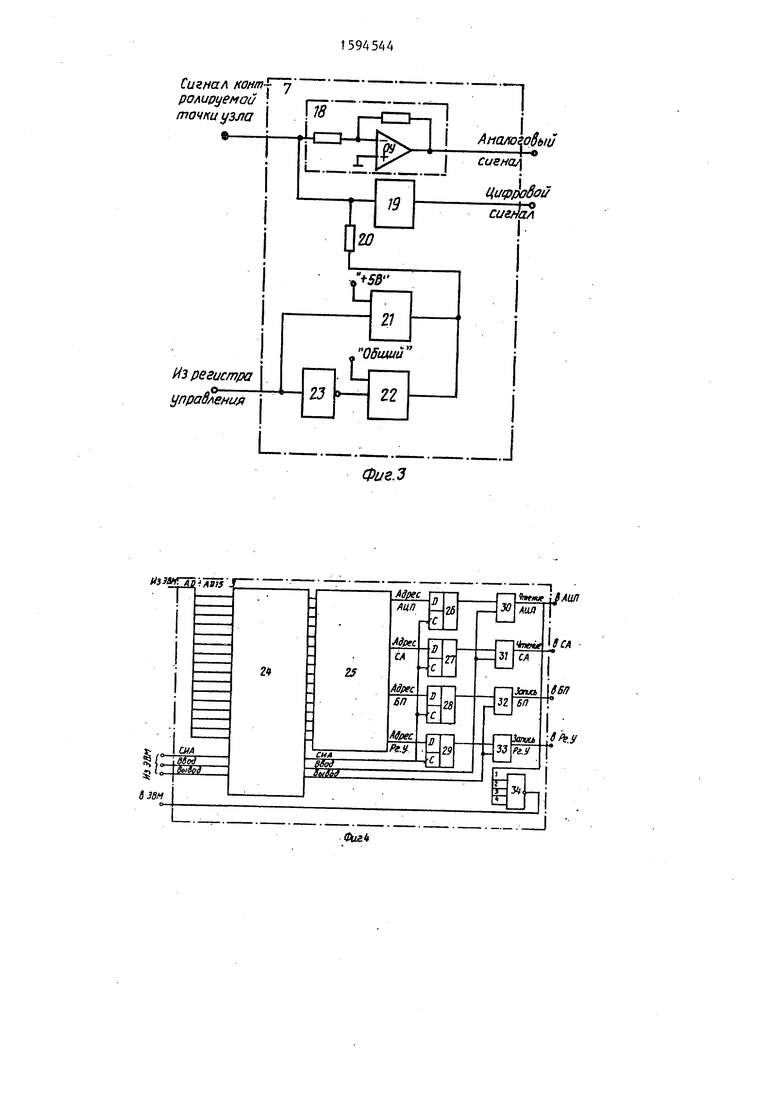
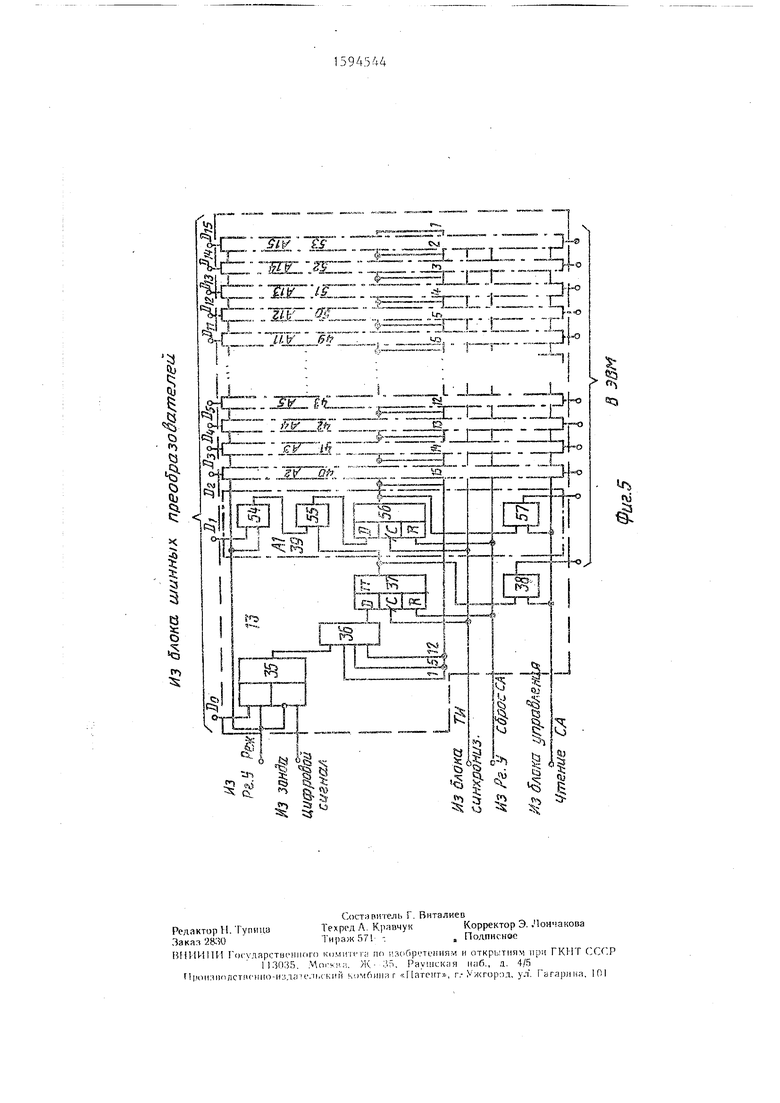
На фиг. 1 представлена структурная схема системы; на фиг. 2 - функциональная схема блока синхронизации; на фиг. 3 - функциональная схема контактного зонда; на фиг. 4 - функциональная схема блока управления; на фиг. 5 - функциональная схема параллельно-последовательного сигнатурного анализатора.
Система для контроля и диагностики цифровых узлов содержит (фиг. I) управляющую микроЭВМ I типа «Электроника-60
с комплектом периферийного оборудования (алфавитно-цифровое печатающее устройство, накопитель на гибких магнитных дисках) и алфавитно-цифровой дисплей 2. образующие.блок задания тестов н анализа реакций, а также блок 3 управления, регистр 4 управления, блок 5 щинных формирователей, аналого-цифровой преобразователь 6, контактный зонд 7, проверяемый узел 8, блок 9 памяти тестовых воздействий, счетчик 10 адреса, мультиплексор 11, блок 12 синхронизации, параллельно-поеледорательный сигнатурный анализатор (регистр) 13.
Блок 12 синхронизации содержит (фиг. 2)
элемент И 14, RS-rpurrep 15, делитель 16
частоты, генератор 17 тактовых импул сс;в.
Контактный зонд 7 содержит (фиг. 3) амалоговый повторитель 18. формирователь 9
цифровых сигналов, резистор 20, первый 21
и второй 22 аналоговые ключи, элемент
НЕ 23.
сд со
сд
4i
Nl;
Управляющая микроЭВМ I типа «Элект- роника-60 предназначена для подготовки, редактирования, ввода, хранения тестовых воздействий, эталонных сигнатур, моделей неисправностей, графов поиска неисправностей, управления работой составных компонентов системы, диалога с пользователем, ;поиска по полученной сигнатуре и коду 1ряжения соотпетствую1дей модели неисправ- 1НОСТИ, определения дальнейшего пути лока- |лизации точного местонахождения неисправ1НОСТИ. i Алфавитно-цифровой дисплей 2 типа 5- ИЭ-00-013 предназначен для осуществления диалогового режима работы между пользователем и системой..
; Блок 3 управления (фиг. 4) обеспечн- :вает стандартный способ подключения сос- тавных компонентов системы к упранлнзд- мцей MHKpOv3BM типа «Электроника-бО, :Имею1цей интерфейс МПИ к синхронизацию обмена данными между ней и составными компонентами. Блок 3 содержит группу усилителей (формирователей). 24, узел 25 дешифрации адресов, триггеры 26-29, элементы И 30-33 и элемент ИЛИ-НЕ 34.
Параллельно-последовательный сигиа- турный регистр 13 (фиг. 5) содержит эле- :мент 2И-ИЛИ 35, сумматор 36 по модулю Д1ча триггер 37 и элемент И 38. Кроме того, регистр 13 содержит 15 однотипных ячеек 39- :53 регистрового типа, причем каждая ячейка ,включает первый элемент И 54, сумматор 55 по модулю два, триггер 56 и второй элемент И 57.
Параллельно-последовательный сигнатур- ньгй анализатор (регистр) 13 предназначен для формирования результирующей сигнатуры откликов па подаваемые тестовые воздействия, поступающие с выходов проверяемого узла в параллельный канал, либо с контролируемой точки схемы в последовательный канал. Он может быть реали- зован на базе нолузаказной СБИС KI515XMI-04G.
Система для контроля и диагностики цифровых узлов РЭА, в состав которой входит управляющая микроЭВМ типа «Электро- ника-60 с комплектом пери4 ерийного оборудования, функционирует под управлением специального программного обеспечения, состоящего из программы управления системой и программ подготовки данных, необходимых для работы с систе1йой. Управляющая программа представляет собой диалоговую систему реального времени, предназначенную для управления аппаратным комплексом системы для контроля и диагностики цифровых узлов. Она позволяет в значительной степени автоматизировать процесс поиска и локализации отказов. В функции управляющей программы входит: обеспече- ;1ие диалогового режима работы с пользователем; ввод и хранение набора тестовых
0
5
0
5
о
5
0
5
0
5
воздействий, - эталонных сигнатур, моделей неисправности, конфигурации контролируемого цифрового узла и графа поиска неисправностей в этом узле; управление работой составных компонентов системы при получении результирующих сигнатур и измерении напряжения в контролируемой точке схемы: определение по полученной параллель ной результирующей сигнатуре результата диагностирования узла, поиск по получаемым результирующим сигнатурам (послеао- вательной и параллельной) и йодам нап)я- жения соответствующих моделей отказов; определение дальнейшего пути локализации точного местонахождения оТ каза в соот- ветствтии с существующим графом поиска неисправностей и конфигурации узла с указанием текущей контролируемой точки.
Управляющая программа реали.зована на языке высокого уровня ПАСКАЛЬ, в среде операционной системы ОС ДВК для микро- ЭВМ типа «Электроника-60. Использование языка высокого уровня позволяет сравнительно легко модифицировать и сопровождать разработанную программу, а также адаптировать ее под другой тип управляющей микроэвм или операционной системы.
Система работает в двух режимах: обучения, предназначенного для-получения эталонных значений сигнатур и моделей неисправностей при физическом моделировании наиболее характерных для данного цифрового узла отказоц, и в режиме контроля и диагностики.
В режиме обучения пользователь с помощью управляющей программы формирует файлы эталонных сигнатур и моделей неисправности для проверяемого цифрового узла. Это производится один раз для каждого вида контролируемого цифрового узла и по существу является перенастройкой и адаптацией системы под новое применение.
Для обуч(;ния системы необходимо разработать набор тестовых воздействий, по возможности наиболее полно осуществляющий диагностирование данного цифрового узла и в то же время не превышающий объем блока 9 памяти тестовых воздейсгвий. Кроме того, необходимо создать файл конфигурации узла и файл графа поиска неисправностей.
Набор тестовых воздействий, загружаемых в блок 9 памяти тестовых воздействий, представляется в виде тестового файла, в ..котором указываются логические состояния всех входов проверяемого узла для каждого тестового воздействия. Число строк в таком файле должно быть не больше емкости блока памяти.
Файл тесторых воздействий подготавливают с помощью специального редактора тестов или с помощью программы авто мати- ческой генерации тестовой последовательиостн, входными данными для которой является формальное описание алгоритма дияг- ностиропания узла на мнемоническом языке элементарных тестовых воздейстпий.
Файл конфигурации уз.па содержит спецификацию элементов цифропого узла и описание связей между элементами. Он предназначен для указания пользователю текущей контролируемой точки схемы нри проведении поиска точного местонахождения отказа или перенастройки системы в соответствии с принципиальрной схемой.
Файл графа поиска неисправностей содержит наиболее важные в диагностическом смыслу точки схемы и возможные оптимальные переходы между ними, проверка которых позволяет наиболее быстро и эффективно по сравнению с простым перебором локализовать неисправность. .
Файлы конфигурации узла и графа поиска неисправностей создаются с помощью специальных диалоговых программ. Файл эталонных сигнатур формируется при ,не- посредствениом участии пользователя путем снятия для всех точек эталонного (исправно работающего) контролируемого узла результирующих сигнатур, образованных в ответ на подаваемый набор тестовых воздействий. Файлы моделей неисправности также формируются при непосредственном участии пользователя путем снятия для тех же точек схемы результирующих значений сигнатур и цифровых кодов напряжений, но при физически внесенных неисправностях (замыкание выходов интегральных схем,замыкание входов и выходов, обрыв сигнальных линий с входов и выхо-дов как элементов, так и узла в целом, замыкание сигнальных линий на шины питания и землю, другие наиболее- характерные для данного узла неисправности пользователь водит информацию о причине возникновения и путях устранения отказа. Данная информация в сочетании с графом поиска неисправности обеспечивает повыщение производительности системы при локализации сложных отказов цифровых узлов.
С точки зрения управления работой составных компонентов системы режим обучения не отличается от работы в режиме контроля и диагностики.
В режиме контроля и диагностики система работает следующим образом.
Управляющая программа запрашивает у пользователя имена файлов набора тестовых воздействий, конфигурации контролируемого цифрового узла, графа поиска неисправностей, эталонных сигнатур, моделей неисправностей, произр.о.т,ит пвод данных из этих файлов и их ра.чмещение в соответствующих структурах данных управляюн1ей программы. В первой фазе диагностирования производится (ачальиаи установка
системы. 71,ля ЧТ01-0 упряг.лпкяная микроЭП.М выгтап.пяет сигналы, а ipeca регистра уп,- равлеиии по тине АОО-Л)5 (Адрес Рг син.хроиизацми ((Л1Л) и rso сигиллу «Ввод н g блоке 3 вырабатывается сигнал «.Зпгнсь 1 г. У, (И) которому в регистр -1 .ч,)писыв, :1ется ии формация, 1 ыставлениоЯ к этому времени микроэвм 1 по игиие А()()-.. Записанное в регистре 4 слово активи.чи)гт cm ня.чы сброса сигнатурного регистра («Сброс СР) и «Сброс, которые обнуляют параллельно- последовательный сигнатурный регистр 13 и счетчик 10 адреса, а также устанавливает мультиплексор 11 в открытое состояние для второго входа.
5 Затем в блок 9 памяти, яз микроЭВМ 1 посредством блока 3, актншг ирующего сигнал записи в блок памяти, «Заинсь БП происходит запись информации с 1пимы AOO-AI5 управляющей микроЭВМ по нулевому адресу блока 9. Для записи следующего тестового
0 слова в блок 9 микроЭВМ 1 з;1писы и)0т в регистр 4 слово, бит которого через мультиплексор 1 увеличивает состояние счетчик.ч 10 на единицу, тем самым задавая следующий адрес в блоке 9. Таким образом произ5 водится запись всего набора тестовых данных в блок 9.
Для установки минимальной частоты выдачи тестовых воздействии в регистр 3 записывается слово, набор битов которого по
зд информационной шине «Код передается в блок 12, который устанавливает соответст вующий код делителя 16 частоты. Параллель но-последовательный сигнатурный регистр 13 переводится в режим параллельного сиша- турного регистра сигналом управления реg жима (РЕЖ), а сигнал управления «Разрешение переводит выходы блока 5 спинных формирователей из «третьего состояния для подачи на проверяемый узел 8 тестовых воздействий из блока 9 памяти и приема oi- кликов в сигнатурный регистр 13 по па рал0 лельному каналу. При этом одновременна обнуляется счетчик 10 (для подачи тестовых воздействий с нулевого адреса) и переключается мультиплексор 11 на передачу информации с.первого входа.
Микроэвм 1 разрешает выдачу тактовых сигналов блоком 12 по сигналу гПуск, и тактовые импульсы через мультиплексор 1 поступают на счетный вход счетчика 10. тем самым перебирая адреса блока 9 памяти. Одновременно с разрешением выдачи
Q тактовых сигналов блоком 12 сигнал «Пуск открывает «окно параллельно-последовательного сигнатурного регистра 13 для свертывания поступающих на него откликов проверяемого узла 8 в параллельную сигнатуру. Выбираемые из блока 9 данные через
5 блок 5 1НИННЫХ формирователей полаются на входы контролируемого цифрового y.vin 8. Ответные отклики с выходов контролируемого узла 8 также через блок 5 поступают
в параллельный канал сигнатурного ре- iHCT);i 13, сиихронизироваиные по времени с моментом выдачи очередного тестового поз- дрнствия на контролируомый узел, что ноз- воляет сформировать результирующую параллельную сигнатуру всего набора тестовых воздействий. При этом стар1ний разряд Сданных, вырабатываемых блоком 9 (сигнал :«Стоп) и подаваемый на информационный :в.ход / 5-триггера 15 блока 12, гк)31ю.ляет ;программ)10 управлять окончанием выдачи тестовых воздействий путем запрета форми- ;рования тактовой частоты, в зависимости ;от длины подаваемого тестового набора. . В режиме выдачи тестовых воздействий ;fto этому разряду из блока 9 выдается сиг- ::Нал логической «1, а по окончания i Boro )ia6opa в нем устанавливается сигнал логического «О, устанавлипающий / 5 -триг- : гер 15 в состояние «О, что иреиятствует нро- : хождению тактовых имнульсов на счетный : вход счетчика 10 и выборки следуюн1его :тестового воздействия.
: Признак окончания набора тестовых воздействий формируется пользователем при создании файла тестовых воздействий с но- соответствующих программных средств (например, редактором текстов). Управляющая микроЭВМ 1 через блок 3 посредством сигнала «Чтение СР произво- : дит считывание полученной параллельной результирующей сигнатуры и производит ее сравнение с эталонным значением. В случае несравнения система по виду получен К)й результируюи1ей параллельной сигнатур1 1 и носледовательнрлм сигнатурам моделей неисправности позволяет определить возможную причину отказа и его местонахождение и переходит в режим локализации точного местонахождения отказа, а в случае совпадения полученной и эталонных сигнатур система осуществляет повторное диагностирование узла при промежуточной и максималь-- но допустимой частоте подачи тестовых воздействий, что позволяет обеспечить диагностирование динамических отказов проверяемого цифрового узла.
Режим локализации точного местонахо - дения неисправности (вторая фаза диагностирования) производится для того же набора тестовых воздействий, размещенных в блоке 9. Для определения точного местонахождения отказа используется информация, получаемая с внутренних точек проверяемого узла 8 при помощи контактного -зонда 7. При этом из регистра 4 подается управляю щий сигнал «Логическая единица на контактный зонд 7, который подключает резистор 20 (фиг. 5) к положительному потенциалу источника питания «-}-5В. 1Диф- ровой сигнал контактного зонда 7 через последовательный канал сигнатурного регистра 13 считывается и запоминается в микроЭВМ. Затем из регистра 4 на контактный зоНД 7
0
подается сигнал «Логический ь уль, который нодключает резистор 20 к |улевому потенциалу источника пита11ия. Цифровой сигнал коитактно|-о зонда 7 считывается.
микроэвм 1 и сравнивается с ранее полученным. Если сигналы не равны (т.е., не равны соответствующие им сигнатуры в контролируемой точке узла), то «oviTaKT и данной точке проверяемого у.зла с KOfrraKT- ным зондом 7 отсутствует. Э та информация в виде соответствующего диагностического сообщения выдается оператору, который должен обеспечить надежное контактирование с зондом в проверяемой точке цифрового узла, или сделать заюцочение об обрыве
цепи (или нахождении контролируемой точки в неопределенном состоянии).
После этого сигнатурный регистр 13 переводится в режим последовательного сигнатурного регистра, для чего в регистре 4 сбрасывается сигнал «РЕЖ, а инф/ормация, поступающая с цифрового выхода контакт- ного зонда 1, установленного в контролируемую точку, передается в последовательный канал регистра 13, что позволяет сформировать результирующ,ую последователь5 ную сигнатуру .цля конкретной проверяемой точки узла. Считывание значения результирующей последовательной с-сигнагуры также производится в микроэвм 1 через блок 3 посредством сигнала чтения сигнатурного анализатора «Чтение СУ. Далее в регистр
0 4 передается слово с битом, вырабатывающим сигнал «Преобразование для разре- гления работы аналого-цифрового преобразователя б, измеряющего напряжение логического сигнала в контролируемой точке. По сигналу блока 3 «Чтение,.АЦП (чте5 ние аналого-цифрового преобразователя) в микроэвм производится прием полученного значения кода напряжения. По гюлу- чепной результирующей, последовательной сигнатуре и цифровому коду напряжения в
д контролируемой точке узла система определяет дальнейщий путь локализации отказа в соответствии с имеюп;имся графом поиска неисправности и ниформац :;; .о при- чинах отказа, хранящихся в моделях неисправностей, с указанием пользователю
5 координаты следующей контролируемой точки узла.
Определение дальнейших действий по локализации отказа производится путем сравнения полученных значений сигнатуры и напряжения с эталонным значением сигна
0 туры и. допустимым напряжением в данной точке, а также поиска в имеющихся для данной точки схемы моделях неисправностей соответствующих сигнатур и кодов допустимых напряжений. Возможно также ori- ре деление вида, отказа и учета вoз foжныx причин его возникновения при формировании координаты следующей контролируемой точки схемы.
Однако для унеличення эффективности работы с систрмой для квалифицированного пользователя предусмотрена возможность операторного ввода координаты те- :чушей контролируемой точки схемы.
Поиск точног о местонахождения отказа производится до тех пор, пока не найдется такая контролируемая точка схемы, для которой но моделям неисправности можно было бы онределить причину возникновения отказа, устраиение которой приведет к ликвидации данного отказа. После устра- .нения причин отказа для проверки функ- цибиирования узла производят первую фазу диагностировании.
Формула изобретения
1. Система для контроля и диагностики н.ифровых узлов, содержан1ая блок.задания тестов и анализа реакций, блок управления, регистр упрапле шя, блок шинных формицион1 ым выходом блока глинных формиро вателей, вторым ин||юрма(и1онным выходом контактного зонда, вторым и третьим иифор- мациоикыми выходами регистра уп)анлении,
g четвертым выходом блока упрл 5ления и выходом мультиплексора, информационны и выход параллельно-последоЕ ательного сигнатурного анализатора подключен к ии- . фор мациоиному входу блока памяти тестовых воздействий и информа и1онной тине
10 блока задания тестов и анализа реакции, адресный вход, вход режима, первый и второй информационные выходы блока памяти тестовых воздействий соединены соответственно с выходом счетчика адреса, пятым
g выходом блока управления, вторым информационным входом бло1са нмшиых форм гропа- телей и входом остапорп блока синхроп зации, вход пуска, вход начллы сп установки и выход которого п()Д .:-. соответственно к четвертому информационному
рователей, аналого-цифровой преобразр- 20 выходу регистра управлени я, группе иифорватель и контактный зонд, информационный вход которого является входом системы для подключения к контрольным точкам проверяемого узла, первый информационный вход и первый информационный выход блока 25 гиинных формирователей являются входом и выходом системы для подключения соответственно к информационному выходу и информационному входу проверяемого узла, информационная шина блока задания тестов и анализа реакций соединена с входом кода операции блока управления, информационным входом регистра управления и информа- циоппым выходом анало1Ч)-цифрового преобразователя, выход признака синхронизации, выход признака ввода, выход признака вывода и вход синхронизации, блока задания тегтов и анализа реакций подключены со(этветственио к входу синхронизации, входу разрешения ввода, входу разрешения вывода и первому выходу блока управления, второй и третий выходы которого соединены соответственно с входом синхронизации регистра управления и входом синхронизации аналого-цифрового преобразователя, а информационный вход и вход разрешения аналого-цифрового преобрамацио1Н ЫХ выходов регистра управлени : первому нпформацнонпому входу мульти
ПЛСКСОра, второй | нфОрМОЦ1 0 Н Ь Й UXO.i li
управляющий вход мультиплексора соединены соответственно с пятым is шестым информационными выходами регистра управления, вход сброса и счетный вход счетчика адреса подключены соответственно к седьмому информационному мыходу регистра управле1 ия и выходу мультиплексора, а
30 восьмой и девятый информационные выходы регистра управления соединены с разре- шаюцхими входами соответственно контактного зонда и блока формирователей.
2. Система по п. 1, отличающаяся тем, что
35 блок управления содержит группу усилителей, узел дешифрации адресов, четыре триггера, четыре элемента И и элемент , выход которого соединен с первым выходом блока, вход кода операции, вход синхронизации, вход разрешения ввода и вход разрешения вывода блока подключены соответственно к входам усилителей группы с первого но четвертый, информационный вход и выходы с первого но четвертый узла дешифрации адресов соединены соответственно
40
зователя подключены соответственно к пер- g с первым выходом усилителей группы и информационными входами триггеров с первого по четвертый, входы синхронизации которых подключены к второму выходу усилителей группы, первые входы элементов И с первого по четвертый соединены с выхо- 50 дами одноименных триггеров, вторые входы первого и второго элементов И подключены к третьему выходу усилителей группы, вторые входы третьего и четвертого элементов И соединены с четвертым выходом усилителей группы, выходы элементов И с пер- 5 вого по четвертый являются выходами блока с второго по пятый и одновременно соединены с одноименными входами элемента ИЛИ-HF,
ному информационному выходу контактного зонда и первому информационному выходу регистра управления, отличающаяся тем, что с целью повышения достоверности контроля за счет оперативного изменения частоты выдачи тестовых воздействий и повышения производительности при локализации сложных отказов цифровых узлов, в нее введены блок памяти тестовых воздействий, счетчик адреса, мультиплексор, блок синхронизации и параллельно-последовательный сигнатурный ана.жзатор, первый и второй информационные входы, вход режима, вход сброса, вход и тактовый вход которого соединены с.оответст;зеино с вторым информацион1 ым выходом блока глинных формиро вателей, вторым ин||юрма(и1онным выходом контактного зонда, вторым и третьим иифор- мациоикыми выходами регистра уп)анлении,
четвертым выходом блока упрл 5ления и выходом мультиплексора, информационны и выход параллельно-последоЕ ательного сигнатурного анализатора подключен к ии- фор мациоиному входу блока памяти тестовых воздействий и информа и1онной тине
блока задания тестов и анализа реакции, адресный вход, вход режима, первый и второй информационные выходы блока памяти тестовых воздействий соединены соответственно с выходом счетчика адреса, пятым
выходом блока управления, вторым информационным входом бло1са нмшиых форм гропа- телей и входом остапорп блока синхроп зации, вход пуска, вход начллы сп установки и выход которого п()Д .:-. соответственно к четвертому информационному
выходу регистра управлени я, группе иифорвыходу регистра управлени я, группе иифор
мацио1Н ЫХ выходов регистра управлени : первому нпформацнонпому входу мульти
ПЛСКСОра, второй | нфОрМОЦ1 0 Н Ь Й UXO.i li
управляющий вход мультиплексора соединены соответственно с пятым is шестым информационными выходами регистра управления, вход сброса и счетный вход счетчика адреса подключены соответственно к седьмому информационному мыходу регистра управле1 ия и выходу мультиплексора, а
восьмой и девятый информационные выходы регистра управления соединены с разре- шаюцхими входами соответственно контактного зонда и блока формирователей.
2. Система по п. 1, отличающаяся тем, что
блок управления содержит группу усилителей, узел дешифрации адресов, четыре триггера, четыре элемента И и элемент , выход которого соединен с первым выходом блока, вход кода операции, вход синхронизации, вход разрешения ввода и вход разрешения вывода блока подключены соответственно к входам усилителей группы с первого но четвертый, информационный вход и выходы с первого но четвертый узла дешифрации адресов соединены соответственно
Последовательный KQfimpOAapijsnoii точки
АОФ А1115
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля цифровой аппаратуры | 1989 |
|
SU1735854A1 |
| Устройство для контроля цифровых узлов | 1981 |
|
SU978154A1 |
| Устройство для контроля цифровых узлов | 1984 |
|
SU1231506A1 |
| Устройство для контроля и диагностики цифровых блоков | 1986 |
|
SU1388871A1 |
| Устройство для контроля цифровых узлов | 1983 |
|
SU1120338A1 |
| Устройство для контроля цифровых узлов | 1985 |
|
SU1269139A1 |
| Устройство для контроля электрических параметров цифровых узлов | 1984 |
|
SU1260974A1 |
| Устройство для контроля цифровых узлов | 1986 |
|
SU1363215A1 |
| Устройство для контроля электрических параметров цифровых узлов | 1980 |
|
SU907556A1 |
| Многовходовой сигнатурный анализатор | 1986 |
|
SU1363213A1 |
Изобретение относится к вычислительной технике, а именно к системам для контроля и диагностики цифровых узлов в процессе их производства и ремонта. Целью изобретения является повышение достоверности контроля за счет оперативного изменения частоты выдачи тестовых воздействий и повышение производительности системы при локализации сложных отказов цифровых узлов. Для этого в систему, содержащую блок задания тестов и анализа реакций, блок управления, регистр управления, блок шинных формирователей, аналого-цифровой преобразователь и контактный зонд, введены блок памяти тестовых воздействий, счетчик адреса, мультиплексор, блок синхронизации и параллельно-последовательный сигнатурный регистр. 1 з.п. ф-лы, 5 ил.
77
//зЯг.У
Луск
cmon
cmot
п6д Из Рг. У
Ф11г.2
Щ
ТИ В мультиплексор
т
Сигнал нонт-- j
ППАППЧОигч
i..,.j
Фие.З
|Ч±::.:ЖЕ:„: -:
S51 i
.. ... .,
AiiL. JL...
f
J t
Г 11 Ж: ;/
дд иця-Ч-Д1 « 1и«джидд -а
E.,.
: EZM;: ir.::iEi3 :
« 5
l
осэ
Г ii
ifb
щ
I
о
&J
sa a
,
i§ R
5 42
ij
| Устройство для контроля цифровых блоков | 1986 |
|
SU1343417A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для контроля цифровых блоков | 1985 |
|
SU1267422A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Система для контроля и диагностики цифровых узлов | 1980 |
|
SU911531A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
