Изобретение относится к промышленному транспорту, а именно к устройствам для транспортирования и перегруз-, ки штучных грузов.
Целью из.обретения является повышение надэжности работы при транспортировании легких грузов и уменьшение металлоемкости.
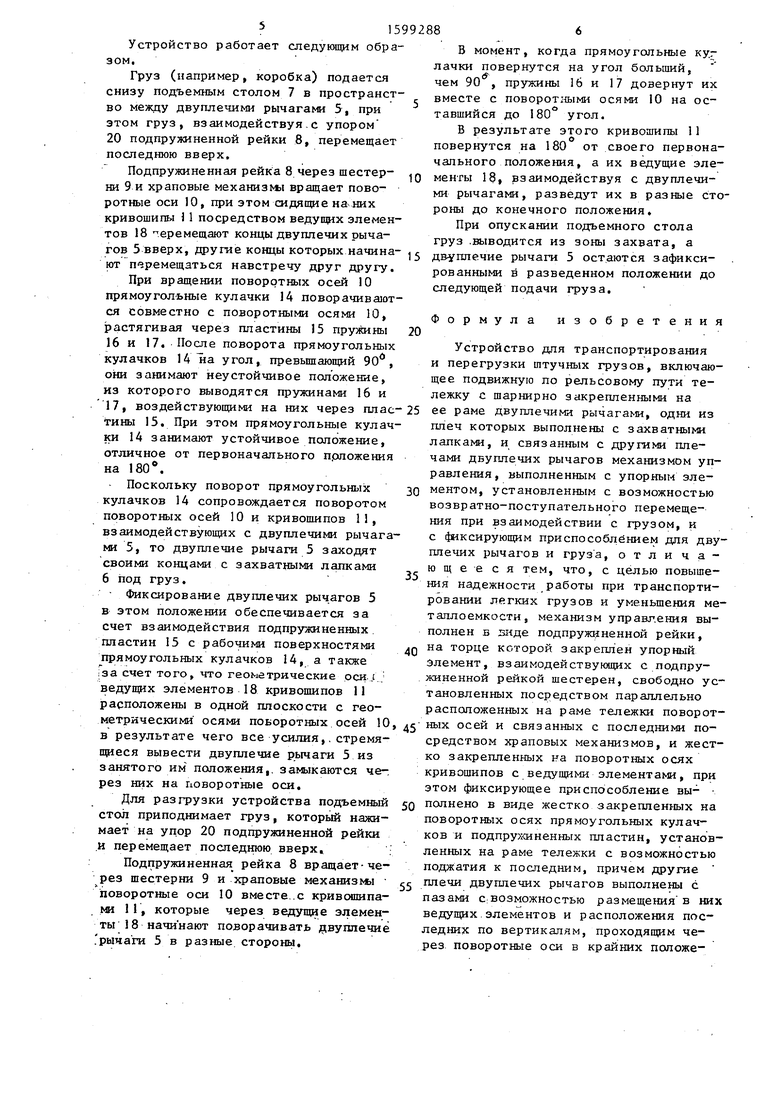
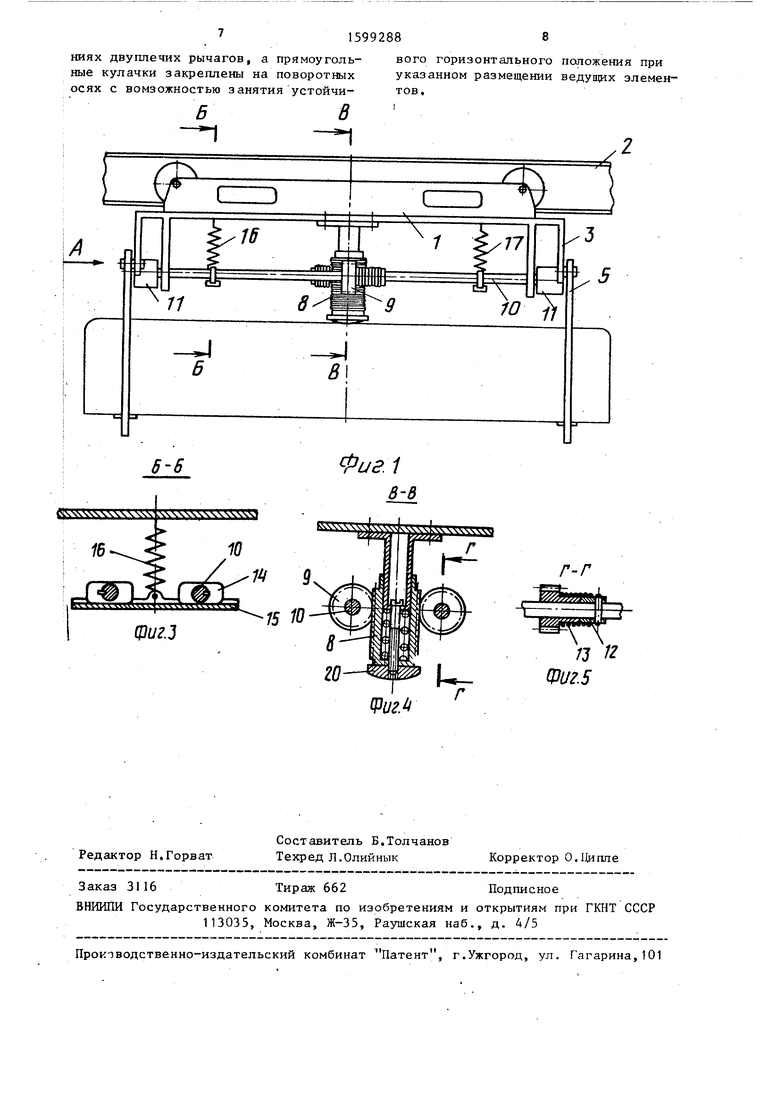
На фиг. 1 изображено устройство, поперечный разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. U на г. 5 - сечение Г-Г на
фиг. 4.
Устройство для транспортирования и перегрузки штучных грузов включает .грузонесущую тележку 1, подвижно установленную на рельсовом, например, монор.ельсовом пути 2 и имеющую раму 3., на которой установлены шарнирно посредством осей 4 двуплечие рычаги 5, связанные одними концами с меха- низмом управления двуплечими рычагами, а на других концах имеющие захват ные лапки 6, и средство относительного перемещения двуплечих рычагов 5 и груза, например подъемно-спускные
столы 7.
Механизм управления двуплечими ры- чагаш выполнен из подпружиненной рейки 8 и взаимодействующих с ней двух шестерен 9, установленных посредство храповых механизмов.на смонтированны на раме 3 пapaллeJ:ьныx поворотных осях 10, и кривошипов П, жестко закрепленных на поворотных осях 10.
Храповые механизмы представляют собой втулки 12, жестко связанные с
5
О
35
до 45
Q
поворотными осями 10, и цилиндрические; пружины 13,.одни концы которых закреп- лены на втулках 12, .а другие располо- жены на ступицах щестерней 9.
Поворотные оси 10 застопорены от произвольного поворота фиксирующим приспособлением, состоящим из жестко, закрепленных на осях 10 прямоугольных кулачков 14 и пластин 15, прижатых к рабочим поверхностям прямоугольных . кулачков 14-посредством пружин 1б и
17.J
- На концах поворотных осей 10 за- креплены кривошипы 1.1, ведущие элементы 18 которых расположенй относительно прямоугольных кулачков 14 в их горизонтальном устойчивом положении во в.заимно перпе--п;икулярных плос костях, проходящих через геометрические оси поворотных осей 10.
На свободных от захватных лапок 6 плечах выполнены, вилки, в пазах 19
которых расположены ведушле элементы -18 кривошипов 11.
Подпружиненная рейка 8 имеет на торце 20 упор для взаимодействия с грузом. Для упрощения конструкции подпружиненная рейка 8 выполнена цшшнд - рической формы.
В исходном положении двуплечие ры- чаги 5 разведены в стороны (4иг. 2), Поворотные оси 10 зафиксированы от произвольного, вращения посредством фиксаторов, прямоугольные кулачки 14 которых удерживаются в одном из двух возможных положений за счет прижатия к ним подпружиненных пластин 15.
51599288
Устройство работает следующим обра10
зон.
Груз (например, коробка) подается снизу подъемным столом 7 в пространство между двуплечими рычагами 5, при этом груз, взаимодействуя-С упором 20 подпружиненной рейки 8, перемещает последнюю вверх.
Подпружиненная рейка 8 через шестерни 9 и храповые механизма вращает поворотные оси 10, при этом сидяпще кривошипы 1 1 посредством ведущих элементов 18 .еремещают концы двуплечих рычагов 5 вверх, другие концы которых начина- «г ют перемещаться навстречу друг другу.
При вращении поворотных осей 10 прямоугольные кулачки 14 поворачиваются совместно с поворотными осями 10, растягивая через пластины 15 пружины 20 16 и 17. После поворота прямоугольных кулачков угол, превышающий , они занимают неустойчивое положение, из которого выводятся пружинами 16 и
В момент, когда прямоугольные куг
лачки повернутся на угол больший, чем 90 , пружины 16 и 17 довернут их вместе с поворотными осями 10 на оставшийся до 180 угол.
В результате этого кривошипы 11 повернутся на 180 от своего первона чального положения, а их ведущие эле менты 18, взаимодействуя с двуплечими рычагами, разведут их в разные с;т роны до конечного положения.
При опускании подъемного стола груз .выводится из зоны захвата, а двуплечие рычаги 5 остаются зафиксированными в разведенном положении до следующей подачи груза.
Формула изобретения
Устройство для транспортирования и перегрузки штучных грузов, включающее подвижную по рельсовому пути тележку с шарнирно закрепленными на
- .jj J arv d U i с: г1 ЛЫ Mta Л а
17, воздействующими на них через плас-25 ее раме двуплечими рычагами, одни из
тины 15. При этом прямоугольные кулачки 14 занимают устойчивое положение, отличное от первоначального прложения на 180.
Поскольку поворот прямоугольных кулачков 14 сопровождается поворотом поворотных осей 10 и кривошипов II, взаимодействующих с двуплечими рычагами 5, то двуплечие рычаги 5 заходят своими концами с захватными лапками
6 под груз.
Фиксирование двуплечих рычагов 5 в этом положении обеспечивается за счет взаимодействия подпружиненных, пластин 15 с рабочими поверхностями прямоугольных кулачков 14, а также 1за счет того, что геометрические оси,,; ведущих элементов 18 кривошипов 11 расположены в одной плоскости с геоплеч которых выполнены с захватными лапками, и связанным с другими плечами двуплечих рычагов механизмом управления, выполненным с упорным эле30 ментом, установленным с возможностью возвратно-поступательного перемещения при взаимодействии с грузом, и с (фиксирующим приспособлением для дву плечих рычагов и груза, отличающееся тем, что, с целью повышения надежности работы при транспортировании легких грузов и уменьшения ме таллоемкости, механизм управл.ения выполнен в виде подпружцненной рейки,
4Q на торце которой закрепл ен упорный элемент, взаимодействующих с подпружиненной рейкой шестерен, свободно ус тановленных пос1)едством параллельно расположенных на раме тележки поворот
- д ii ъ i-j. д. . 1 i. J I
метрическиш осями поворотных осей 10, 45 ных осей и связанных с последними пов результате чего все усилия,,стремящиеся вывести двуплечие рычаги 5 из занятого им положения,, за Ф1каются через них на поворотные оси.
Для разгрузки устройства подъемный стол приподнимает груз, который нажимает на упор 20 подпружиненной рейки и перемещает последнюю вверх.
Подпружиненная рейка 8 вращает-через шестерни 9 и храповые механизм 1 поворотные оси 10 вместе .с кривошипа- , ми 11, которые через ведущие элементы Ч 8 начинают поворачивать двуплечие .рычаги 5 в разные стороны.
средством храповых механизмов, и жест ко закрепленных на поворотных осях кривошипов с ведущими элементами, при этом фиксирующее приспособление вы-
50 палнено в виде жестко закрепленных на поворотных осях прямоугольных кулачков и подпружиненных пластин, установленных на раме тележки с возможностью поджатия к последним, причем другие
55 плечи двуплечих рычагов выполнены с пазами С;возможностью размещения в них ведущих.элементов и расположения последних по вертикалям, проходящим через поворотные оси в крайних положе0
г
0
В момент, когда прямоугольные куг
лачки повернутся на угол больший, чем 90 , пружины 16 и 17 довернут их вместе с поворотными осями 10 на оставшийся до 180 угол.
В результате этого кривошипы 11 повернутся на 180 от своего первоначального положения, а их ведущие элементы 18, взаимодействуя с двуплечими рычагами, разведут их в разные с;то- роны до конечного положения.
При опускании подъемного стола груз .выводится из зоны захвата, а двуплечие рычаги 5 остаются зафиксированными в разведенном положении до следующей подачи груза.
Формула изобретения
Устройство для транспортирования и перегрузки штучных грузов, включающее подвижную по рельсовому пути тележку с шарнирно закрепленными на
- .jj J arv d U i с: г1 ЛЫ Mta Л а
5 ее раме двуплечими рычагами, одни из
плеч которых выполнены с захватными лапками, и связанным с другими плечами двуплечих рычагов механизмом управления, выполненным с упорным эле0 ментом, установленным с возможностью возвратно-поступательного перемещения при взаимодействии с грузом, и с (фиксирующим приспособлением для двуплечих рычагов и груза, отличающееся тем, что, с целью повышения надежности работы при транспортировании легких грузов и уменьшения металлоемкости, механизм управл.ения выполнен в виде подпружцненной рейки,
Q на торце которой закрепл ен упорный элемент, взаимодействующих с подпружиненной рейкой шестерен, свободно установленных пос1)едством параллельно расположенных на раме тележки поворот - д ii ъ i-j. д. . 1 i. J I
5 ных осей и связанных с последними посредством храповых механизмов, и жестко закрепленных на поворотных осях кривошипов с ведущими элементами, при этом фиксирующее приспособление вы-
палнено в виде жестко закрепленных на поворотных осях прямоугольных кулачков и подпружиненных пластин, установленных на раме тележки с возможностью поджатия к последним, причем другие
плечи двуплечих рычагов выполнены с пазами С;возможностью размещения в них ведущих.элементов и расположения последних по вертикалям, проходящим через поворотные оси в крайних положеФиг.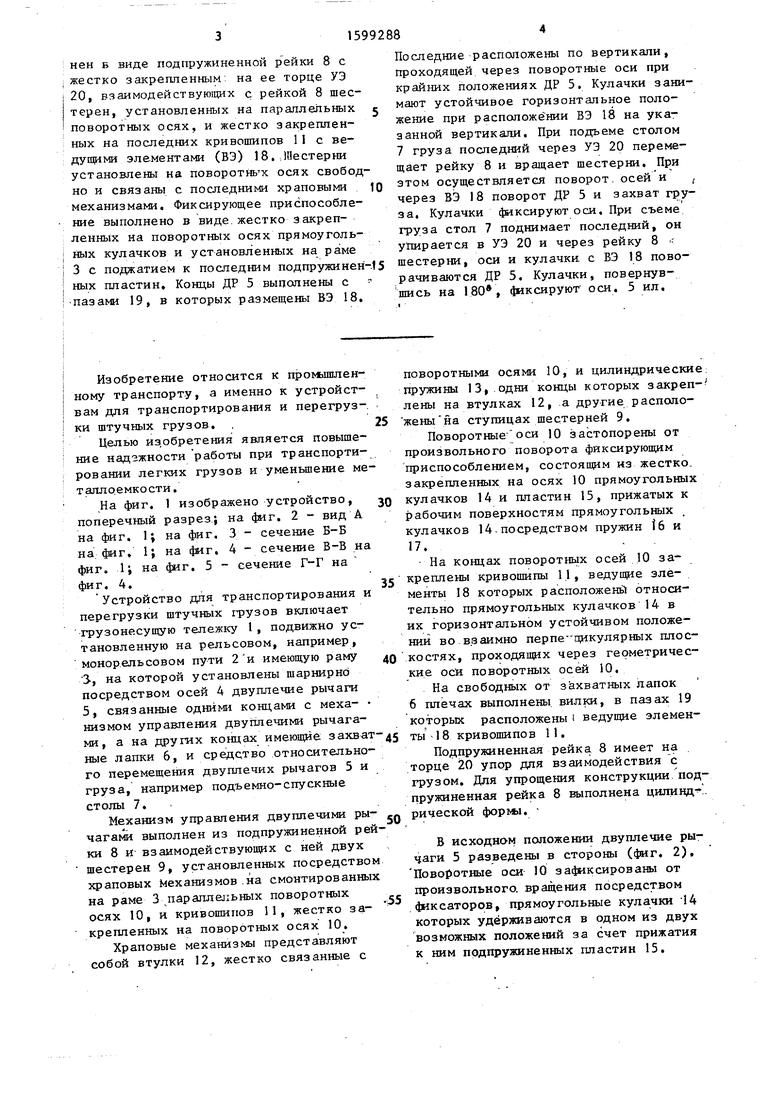
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки тележечного конвейера | 1976 |
|
SU659479A1 |
| САМОСВАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2652759C2 |
| Пресс для вырубки заготовок из плоского материала | 1983 |
|
SU1119762A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1324980A1 |
| Металлорежущий станок | 1982 |
|
SU1069972A1 |
| Устройство для контроля и сортировки магнитов | 1987 |
|
SU1443979A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU899210A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| КОРНЕКЛУБНЕУБОРОЧНЫЙ АГРЕГАТ И.Г.МУХИНА | 1996 |
|
RU2104630C1 |
Изобретение относится к промышленному конвейерному транспорту и позволяет повысить надежность работы при транспортировании легких грузов и уменьшить металлоемкость. Устройство содержит подвижную по рельсовому пути тележку 1 с шарнирно закрепленными на ее раме 3 двуплечими рычагами (ДР) 5 и связанным с плечами последних механизмом управления, выполненным с упорным элементом (УЭ) 20 и фиксирующим приспособлением для ДР 5. Для подачи и съема грузов с тележки 1 служит подъемно-опускной стол 7, являющийся средством относительного перемещения ДР 5 и груза. На свободных плечах ДР 5 выполнены захватные лапки 6. Механизм управления выполнен в виде подпружиненной рейки 8 с жестко закрепленным на ее торце УЭ 20, взаимодействующих с рейкой 8 шестерен, установленных на параллельных поворотных осях, и жестко закрепленных на последних кривошипов 11 с ведущими элементами (ВЭ) 18. Шестерни установлены на поворотных осях свободно и связаны с последними храповыми механизмами. Фиксирующее приспособление выполнено в виде жестко закрепленных на поворотных осях прямоугольных кулачков и установленных на раме 3 с поджатием к последним подпружиненных пластин. Концы ДР 5 выполнены с пазами 19, в которых размещены ВЭ 18. Последние расположены по вертикали, проходящей черех поворотные оси при крайних положениях ДР 5. Кулачки занимают устойчивое горизонтальное положение при расположении ВЭ 18 на указанной вертикали. При подъеме столом 7 груза последний через УЭ 20 перемещает рейку 8 и вращает шестерни. При этом осуществляется поворот осей и через ВЭ 18 поворот ДР 5 и захват груза. Кулачки фиксируют оси. При съеме груза стол 7 поднимает последний, он упирается в УЭ 20 и через рейку 8 шестерни, оси и кулачки с ВЭ 18 поворачиваются ДР 5. Кулачки, повернувшись на 180°, фиксируют оси. 5 ил.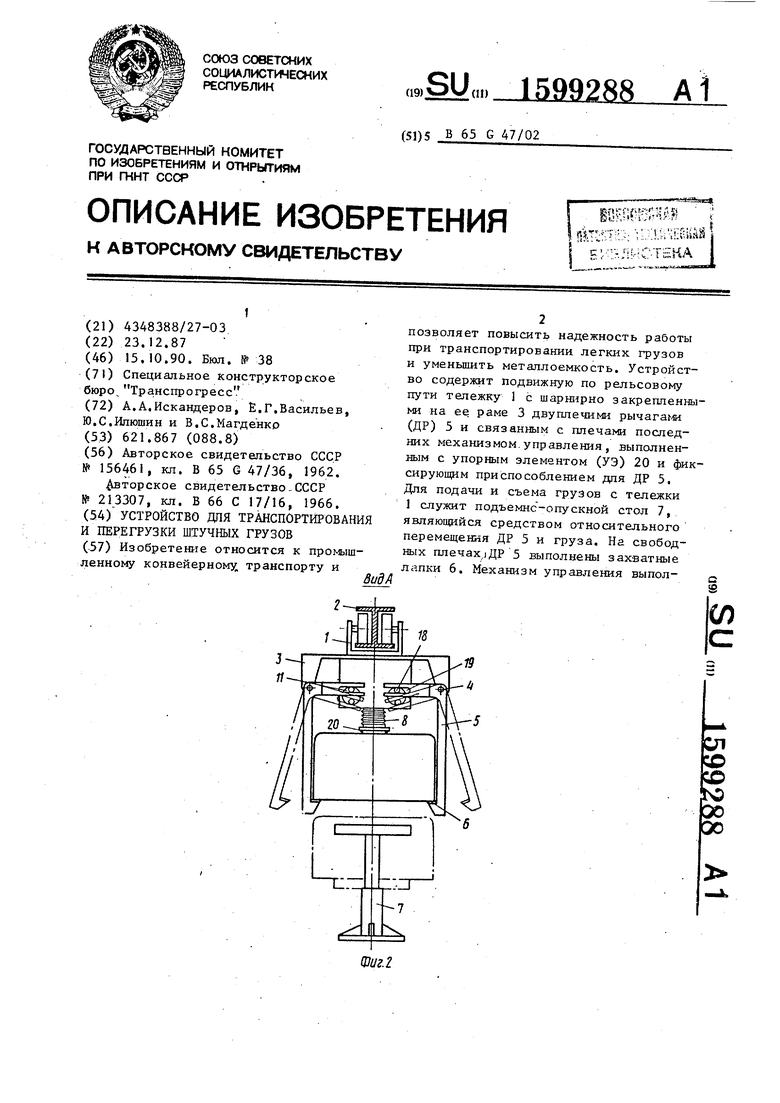
| 0 |
|
SU156461A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ | 0 |
|
SU213307A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
