Изобретение относится к области автоматизации прокатного производства .и может быть использовано для автоматической стабилизации запаса полосы в накопителе непрерывно-травильного агрегата.
Целью изобретения является повышение точности измерения запаса полосы и его стабилизации.
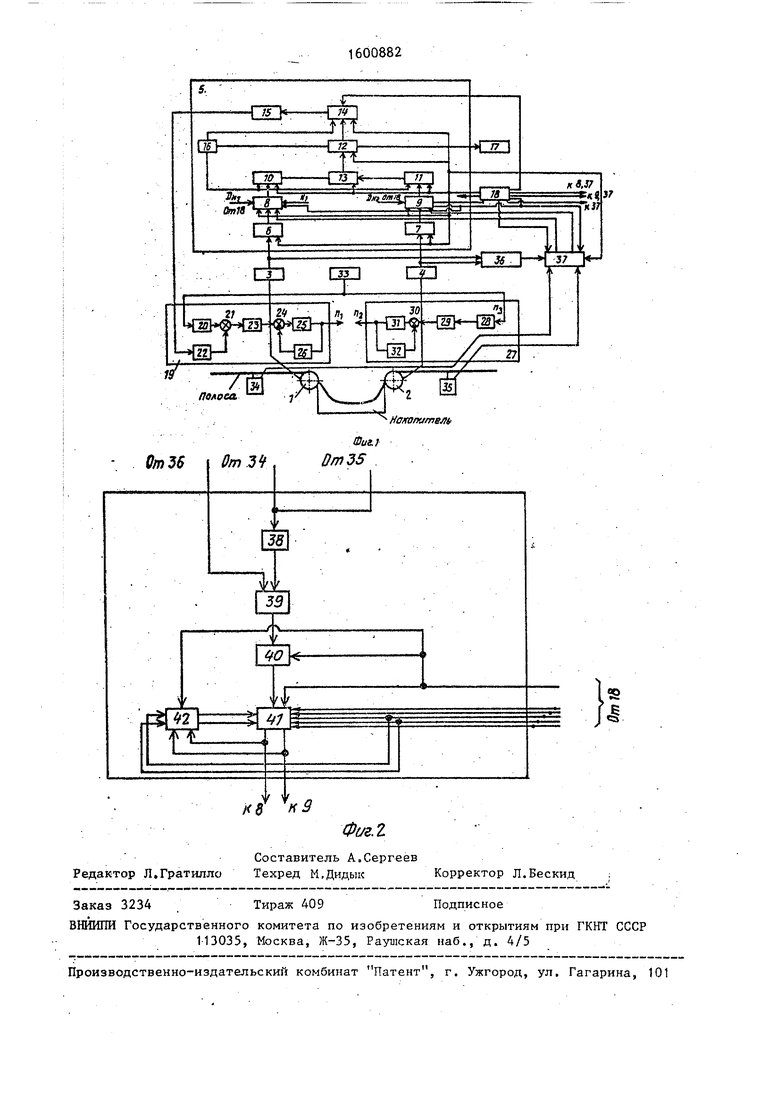
На фиг.1 представлена функциональная схема системы стабилизации запаса полосы в накопителе; на фиг.2 - структура второго вычислительного блока.
Система (фиг.1) содержит тянущие ролики 1 и 2, датчики 3 и 4 импульсов, ки нематически связанные с тянущими роликами, вычислительный блок 5, включаю1ций счетчики 6 и 7 импульсов
блоки 8 и 9 умножения, регистры 10- 12, вычитающие сумматоры 13 и 14, цифроаналоговый преобразователь (ЦАП) 15 и генератор 16 имрульсов, индикатор 17 запаса полосы, блок 18 ручного ввода данных, блок 19 управления электроприводом тянущего ролика 1, включающий усилитель 20, сумматор 21, усилитель 22, задатчик 23 интенсивности, вычитающий сумматор 24, регулятор 25 скорости, тахогенератор 26, блок 27 управления электроприводом тянущего ролика 2, включающий усилитель 28, задатчик 29 интенсивности, вычитающий сумматор 30, регулятор 31 скорости, тахогенератор 32, задатчик 33 скорости электроприводов, пробойник 34 контрольных отверстий, инди(З:)
00
эо
катор 35 контрольных отверстий, коммутатор 36 и вычислительный блок 37, причем тянущие ролики 1 и 2, установ- денные соответственно до и после накопительного колодца, соединены (кинематически) соответственно с первым 3 и вторым 4 датчиками импульсов выходы которых соединены соответственно с первым и вторым входами вычислительного блока 5 и коммутатора 36. Первый выход вычислительного блока 5 соединен с первым.входом блока 19 управления электроприводом, второй вход которого и вход блока 27 управления электроприводом тянущего ролика 2 соединены с выходом задатчика 33 скорости электроприводов. Выходы коммутатора 36, пробойника 34 и индикатора 35 контрольных отверстий соединены соответственно с первым, вторым и третьим входами вычислительного блока 37, четвертый вход которого соединен с вторым выходом вычислительного блока 5, третий и четвертый входы вычислительного блока 5 соединены соответственно с первым и вторым выходами вычислительного блока 37, пятый вход которого, и пятый вход вычислительного блока 5. соединены с первым выходом блока-18 ручного ввода данных, второй выход которого соединен с шестым входом вычислительного блока 37, седьмой, восьмой и девятый входы которого соединены соответственно с третьим, четвертым и пятым вькодами блока 18 ручного ввода данных, шестой выход которого соединен с шестым входом вычислительного блока 5, седьмой вход которого соединен с седьмым выходом блока 18. ручного ввода данных, восьмой и девятый выходы которого соединены соответственно с восьмым и девятым входами вычисли- тельного блока 5, третий выход вычислительного блока 5 соединен с входом индикатора 17, четвертый и пятый вы- ходы-блока 18 ручного ввода данных соединены соответственно с десятым и одиннадцатым входами вычислительного блока 5,
Вычислительный блок 5 содержит (фиг.1) счетчики 6 и 7 импульсов, блоки 8 и 9 умножения, регистры Ю- 12, вычитающие сумматоры 13 и 14, ЦАП 15 и генератор ,16 импульсов, пер вый, второй и третий входы которого соединены с первьми входами,соответсвенно сумматора 14, регистров 10-12,
О
5
0
5
0
5
40
45
50
вторые входы сумматора 14 и регистров 10-12 соединены с седьмым входом блока 5 и первым входом вьгаитающего сумматора 13, второй и третий входы которого соединены с выходами регистров соответственно 10 и 11, рыход вычитающего сумматора 13 соединён с третьим входом регистра 12, четвертый вход которого соединен с шестым входом блока, а выход через ЦАП - с выходом блока, первые входы счетчиков 6 и 7 соединены с первым и вторым входами блока соответственно, а вторые входы - с седьмым входом блока, выходы счетчиков 6 и 7 соединены с первыми входами блоков 8 и 9 умножения соответственно, вторые входы которых соединены с седьмым входом блока, третий вход блока 8 умножения соединен с третьим входом блока, третий вход блока умножения соединен с четвертым входом блока 9 умножения, четвертые входы блоков 8 и 9 умножения соединены с пятым входом блока, пятый вход блока 8 умножения соединен с восьмым входом блока, пятый вход блока 9 умножения соединен с девятым входом блока, шестой вход блока 8 умножения соединен с десятым входом , блока, а шестой вход блока 9 умножения - с одиннадцатым входом блока, выходы блоков 8 и 9 умножения соединены с третьим входами регистров 10 и 11 соответственно.
Вычислительный блок 37 (фиг. 2) содержит триггер 38, логический элемент И 39, счетчик 40 импульсов, арифметическое устройство 41 и запоминающий блок 42, причем первый вход элемента И 39 является первым входом вычислительного блока, второй и третий входы которого являются входом триггера 38, выход триггера 38 соединен с вторым входом элемента И 39, выход которого соединен с первым входом счетчика 40 импульсов, выход которого соединен с первым входом арифметического уст- ройства 41, вторые входы счетчика 40 импульсов и арифметического устройства 41, а также первый вход запоминающего блока 42 являются соответстве.нно четвертым входом вычислительного бло-. ка, остальные пять входов которого, начиная с пятого из них, являются входами соответственно с третьего по седьмой арифметического устройства 41, второй и третий-входы запоминающего блока 42 также соединены соот5 1 ветственно с девятым и восьмым входами вычислительного блока, первый и второй входы запоминающего блока 42 соединены соответственно с восьмым и девятым входами арифметического устройства 41, первый и второй входы которого соединены соответственно с четвертым и пятым входами запоминающего блока 42 и являются соответ- ственно первым и вторым выходами вычислительного блока.
Система работает следующим образом.
Предварительно путем подачи сигна лов с блока 18 ручного ввода данных (седьмой выход) производится обнуление счетчиков 6, 7 и 40 импульсов, блоков 8 и 9.умножения, регистров Ю 12, вычитающих сумматоров 13 и 14, .арифметического и запоминающего устройств 41 и 42 соответственно. Затем путем подачи сигналов с блока 18 ручного ввода данных производится- вйод исходных данных: по шестому вы
де D ,, D 4 оду - заданного запаса 1-г. полосы в ычитающий сумматор 14; по восьмому девятому выходам - в блоки 8 и 9 начений переводньпс коэффициентов К, 1ГО,/М; Кг ,
диаметры тянущих роликов 1 и 2;
М - число импульсов на один оборот тянущего ролика (датчика импульсов), по второму и третьему выходам - знаений базовой длины L, U D дд в вычислительный блок 37, по пятому и четвертому выходам - значений диаметров Вц| , T), по первому выходу - константы IJ в блоки 8, 9 и 37.
Путем подачи сигнала от задатчи- ка 33 скорости электроприводов, про-, ходящего через усилители 20 и 28, за- датчики 23 и 29 интенсивности и поступающего в контуры регуляторов 25 и
31скорости с тахогенераторами 26 и
32в обратной связи, производится запуск приводов (не показаны), кинематически связанных с тянущими роликами 1 и 2 и датчиками 3 и 4 импульсов. Датчики 3 и 4 импульсов начинают выдавать импульсы, подсчитываемые счетчиками 6 и 7 импульсов в процессе / движения полосы. В начальньш момент; содержимое второго вычитающего сумматора 14 равно о
ео 0-1 -H.
2
Это значение преобразуется с помощью ЦАП 15 и в виде управляющего (координирующего) сигнала .поступает в усилитель 22 коррекции, выходной сигнал которого в виде положительной добавки поступает в канал основного задания сигнала по скорости блока 19 управления электроприводом тянущего ролика 1. За счет этой добавки . нущий ролик 1 начинает вращаться быстрее, что приводит к быстрому накоплению текущего запаса I j- полосы.
В процессе накопл- ния полосы в блоках 8 и 9.умножения производится умножение текущего числа импульсов N-r и N.T, на коэффициенты К, и К. Полученные после умножения величины текущих длин полосы
{П
N.
N,
Го,
кВг
Г2 М
поступают в регистры 10 и 11, на
входы которых также приходят импульсы первой серии с частотой следования f|.. Эти импульсы производят перезапись содержимого регистров Ю и 11 в вычитающий сумматор 13, на выходе которого образуется величина й1-г поступающая в регистр 12, содержимое которого с помощью второй серии импульсов, сдвинутых на с, относительно первой серии, .но следующих с той же частотой f р, периодически поступает в индикатор 17 для визуального контроля и перезаписывается в вычитающий суммато{з 14, где производится вычисление отклонения 6 текущего запаса полосы от заданного. С помощью тьей серии импульсов, также следующих с той же частотой fp, но сдвинутых на время (г относительно первой, при условии 1) ,, производится перезапись содержимого вычитающего сумматора 14 в ЦАП 15, где величина 6 преобразуется в потенциальный сигнал, поступающий на вход ус шителя 22 для коррекции сигнала задания по скорости, поступающего в блок 19 управления
электроприводом тянущего ролика 1.
. При сравнении текущего Д1| и заданного запаса 1-, полосы на индикаторе 17 выс
вечивается значение запаса полосы,
соответствующее заданному его значению. Управляющий (координирующий) сигнал при этом не вырабатыву -тся.
1600882
Действие возмущающих факторов таких как повышение или понижение йагрузки приводов, колебание источников питания, разброс параметров локальных регуляторов и другие, приво- jitHT к рассогласованию угловых скоростей привода агрегата и к невыполнению условий, что вызьюает уход теку- цего запаса полосы 41т- от заданного г. Это, в свою очередь, приводит к Цфаботке си-гнала ошибки 6, а следо- ательно, и управляющего воздействия, Направленного на стабилизацию запаса
8
и проверкой условия
ЛОгиш-йОьад О..
Полученные новые значения диаметров периодически при выполнении условий
UD,. Oi
10
L ПОЛОСЫ.15
1 Для обеспечения равенства линейных скоростей необходимо учиты- Ьать разницу диаметров измерительных |роликов, являющуюся следствием их из- JHoca в процессе эксплуатации. Учет 1этой разницы производится в вычисли- |тельном блоке 37, принцип действия которого заключается в следующем. Сигнал от пробойника 34 контрольных отверстий поступает на вход триггера i38 (фиг.2), переводя его в единичное состояние, .что дает возможность при наличии сигнала от коммутатора 36 (при подключении-его к первому датчику, импульсов) пропустить импульсы 20 через элемент И 39 для подсчета их в счетчике 40 импульсов. Полученное значение Ng| числа импульсов используется далее для расчета диаметра В,,4„ измерительного ролика-в арифме irtjM-iiJj oiA - ЛОги -йВзяд 0.
вводятся в блоки 8 и 9 умножения вы- числительного блока 5.
Введение вычислительного блока 37 позволяет придать системе свойство адаптации к износу измерительных роликов 1 и 2, что приводит к снижению погрешности стабилизации запаса полосы в накопителе..
20
25
Формула изобретения
1, Система стабилизации запаса полосы в накопителе, содержащая два тянущих ролика, установленных до и посл накопительного колодца, блоки управле ;ния электроприводами тянущих роликов ;И два датчика импульсов, причем тяну- I щие ролики кинематически соединешл i с датчиками импульсов, о т л и ч а - |Ю щ а я с я тем, что, с целью повыш ния точности измерения запаса полосы и его стабилизации, она снабжена дву мя вычислительными блоками, пробойником и индикатором/контрольных отверстий, коммутатором и задатчиком скорости, причем выходы первого и второ го датчиков импульсов соединены соот
и W-J ИС W«Tl ACJlOiivyi -/ vvii.- f f- fAv T. ..M --w 1.,1 ,.---.
тическом устройстве 41 по соотношению - ветственно с nepBfcnvi и вторым входами
D
Lll
V
N5,. после чего определяется разница
Ш «5м В том случае, когда это значение превьшает пороговое, что определяется проверкой условия Л , в знаковом разряде сумматора арифметического устройства 41, вырабатывается сигнал, по которому измеренное значение D,j,, вводится в ячейку запоминающего устройства 42 для замены прежнего значения диаметра измерительного ролика на новый, г.е. значение П„, заменяется на Щ.ц При последующих измерениях описанная процедура повторяется. Измерение диаметра D j j BToporo измерительного ролика производится аналогично по соотношениям, LfM
DHJ-DzM MfDjHjM
8
и проверкой условия
ЛОгиш-йОьад О..
Полученные новые значения диаметров периодически при выполнении условий
UD,. Oi
0
5
20
irtjM-iiJj oiA - ЛОги -йВзяд 0.
вводятся в блоки 8 и 9 умножения вы- числительного блока 5.
Введение вычислительного блока 37 позволяет придать системе свойство адаптации к износу измерительных роликов 1 и 2, что приводит к снижению погрешности стабилизации запаса полосы в накопителе..
Формула изобретения
1, Система стабилизации запаса полосы в накопителе, содержащая два тянущих ролика, установленных до и после накопительного колодца, блоки управле- ;ния электроприводами тянущих роликов ;И два датчика импульсов, причем тяну- I щие ролики кинематически соединешл i с датчиками импульсов, о т л и ч а - |Ю щ а я с я тем, что, с целью повыше- ния точности измерения запаса полосы и его стабилизации, она снабжена двумя вычислительными блоками, пробойником и индикатором/контрольных отверстий, коммутатором и задатчиком скорости, причем выходы первого и второго датчиков импульсов соединены соотAv T. ..M --w 1.,1 ,.---.
ветственно с nepBfcnvi и вторым входами
0
5JQ 5
коммутатора, а также с первым и вторым входами первого вычислительного блока, первый выход которого соединен с первым входом блока управления электроприводом первого тянущего ролика, второй вход.которого и вход блока управления электроприводом второго тянущего ролика соединены с выходом задатчика скоройти, выходы коммутатора, пробойника и индикатора контрольных отверстий соединены соот- ветсвенно с первым, вторым и третьим входами второго вычислительного блока, первый и второй выходы которого соединены с третьим, и четвертым входами первого вычислительного блока, второй выход которого соединен с четвертым входом второго вычислительного блока, пятый вход которого соединен с первым выходом блока ручного ввода данных и пятым входом первого вычислительного блока, второй и третий выходы блока ручного ввода данных
соединены с шестым и седьмым входами второго вычислительного блока соответственно, восьмой и девятый входы которого соединены с четвертым и пятым выходами блока ручного ввода дан- ных, шестой выход которого соединен с шестым входом первого вычислительного блока, седьмой, восьмой и девятый входы которого соединены с седьмым, восьмым и девятым выходами блока руч- ного ввода данных, третий выход первого вычислительного блока соединен с входом индикатора.
i 2. Система поп,1, отличающаяся тем, что первый вычислительный блок содержит два счетчика импульсов, два блока умножения, три регистра, два вычитающих сумматора, цифроанал оговый преобразователь, генератор импульсов, причем первые входы первого и второго счетчиков импульсов являются соответственно первым и вторым входами вычислительного блока, выходы первого и второго счетчиков импульсов соединены с первыми входами соответственно первого и второго блоков умножения, выходы первого и второго блоков умножения соединены с первыми входами соответственно первого и второго регистров, вторые входы которых соединены с пер- вът выходом генератора импульсов, выходы первого и второго регистров соединены соответственно с первым и вторым входами первого вычитающего сумматора, выход которого соединен ;с первым входом третьего регистра, второй вход которого соединен со вторым выходом генератора импульсов, первый и второй выходы третьего регистра соединены соответственно с третьим входом вычислительного блока и с первым входом второго вычитающего сумматора, второй вход которого соединен с третьим выходом генератора импульсов, выход второго вычитающего сумматора соединен с входом цифроана- логового преобразователя, выход которого является первым выходом вычислительного блока, вторые входы первого и второго счетчиков импульсов, вторые
5
5
0
5
0
5
0
5
0
I входы первого и второго блоков умножения, третьи йхйды первого и второго регистров, первого и второго вычитающих сумматоров являются седьмьш выходом вычислительного блока, четвертый вход второго вычитающего сумматора соединен с шестым входом вычислительного блока, третий и четвертый входы которого являются третьими входами первого и второго блоков умножения, четвертые входы первого и второго блоков умножения соединены с пятым выходом вычислительного блока, пятые входы первого и второго блоков умножения соединены соответственно с восьмым и девятым входами вычислительного блока, десятый и одиннадцатый выходы которого соединены с шестыми входами первого и блоков умножения.
3. Система поп.1, отличающаяся тем, что второй вычислительный блок содержит триггер, логический элемент И, счетчик импульсов, арифметическое устройство и запоминающий блок, причем первый вход элемента И является первым входом вычислительного блока, второй и третий входы которого являются входом триггера, выход которого соединен с вторым входом элемента И, выход которого соединен с первь входом счетчика импульсов, выход которого соединен с первым входом арифметического устройства, а также первьй вход запоминающего блока является четвертым входом вычислительного блока, остальные пять входов которого, начиная с пятого из них, являются входами соответственно с третьего по седьмой арифметического устройства, второй и третий входы запоминающего блока также соединены соответственно с девятым и восьмым входами вычислительного блока, первый и второй выходы запоминающего блока соединены соответственно с восьмым и девятым входами арифметического устройства, первый и второй выходы которого соединены соответственно с четвертым и пятым входами запоминающего блока и ЯШ1ЯЮТСЯ соответственно первым и вторым выходами вычислительного блока.
/ Полоса
®Щ



| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования вытяжки непрерывной полосы | 1988 |
|
SU1570814A1 |
| Система автоматического управления непрерывным агрегатом для обработки рулонов | 1988 |
|
SU1639817A1 |
| Устройство для вычисления полинома | 1982 |
|
SU1098003A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ЭФФЕКТИВНОСТИ | 2001 |
|
RU2178201C1 |
| СПОСОБ ЦИФРОВОЙ РЕКУРСИВНОЙ ПОЛОСОВОЙ ФИЛЬТРАЦИИ И ЦИФРОВОЙ ФИЛЬТР ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2014 |
|
RU2579982C2 |
| Устройство для вычисления элементарных функций | 1983 |
|
SU1160429A1 |
| АДАПТИВНЫЙ ВРЕМЕННОЙ ДИСКРЕТИЗАТОР | 2015 |
|
RU2583707C1 |
| СПЛАЙН-ИНТЕРПОЛЯТОР | 1997 |
|
RU2116668C1 |
| Устройство для обнаружения движущихся объектов | 1989 |
|
SU1817256A2 |
| СПЛАЙН-ИНТЕРПОЛЯТОР | 1997 |
|
RU2116669C1 |
Изобретение относится к автоматизации прокатного производства и может использоваться для автоматической стабилизации запаса полосы в накопителе непрерывно-травильного агрегата. Цель изобретения - повышение точности измерения запаса полосы и его стабилизации. Она достигается благодаря непрерывному учету износа тянущих роликов, используемых в качестве измерительных. 2 з.п. ф-лы, 2 ил.
Фш.г
Составитель А.Сергеев Редактор Л.Гратилло Техред М.Дидык Корректор Л.Бескид
Заказ 3234
Тираж 409
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Рауиюкая наб., д. 4/5
-ffff/ronumsjf Шиг.)
во
i
Подписное
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для контроля количества полосы в накопленном колодце | 1974 |
|
SU496597A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Устройство для контроля количества полосы в накопительном колодце | 1976 |
|
SU610580A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для измерения запаса полосы в накопительном колодце | 1983 |
|
SU1088828A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
