Изобретение относится к области транспортного машиностроения, в част ности, к механизмам дистанционного управления коробками передач таких- самоходных машин, как тракторы, ав томобили, комбайны и т.д. . Цель изобретения - облегчение управления за счет уменьшения зоны продольного качания рычага.
35
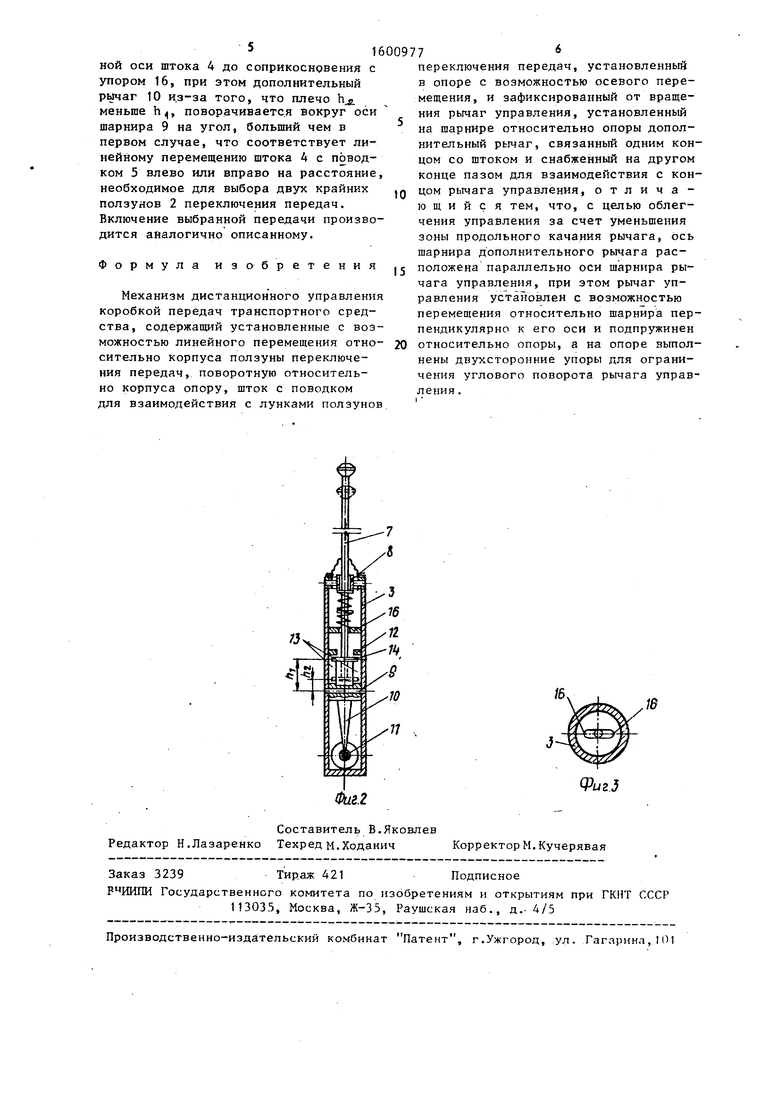
На фиг.1 показан механизм, продольный разрез; на фиг.2 - то же, поперечный разрез; на фиг.З - двухсторонний упор.
Механизм дистанционного управления коробкой передач транспортного средства содержит установленные t возможностью линейного перемещения относительно корпуса 1 ползуны 2 не реключения передач, поворотную относительно корпуса 1 опору 3, шток 4 с поводком 5 для взаимодействия с лун ками 6 ползунов 2 переключения передач, устано вленный в опоре 3 с воз 0 можностью осевого перемещения и зафиксированный от вращения рычаг 7 управления, установленный на шарнире 8 относительно опоры 3, и установленный на шарнире 9 относительно опоры 3 дд
дополнительный рычаг 10, связанный одним концом 11 со штоком 4 и снабженный на другом конце 12 пазом 13 для взаимодействия с концом 14 рыча
га 7 управления. Ось шарнира дополни- тельного рычага 10 расположена параллельно оси шарниру 8 рычага 7 управ- ления, а рычаг fуправления установлен с возможностью перемещения относительно шарнира 8 перпендикулярно к его оси и подпружинен пружиной 15 относительно опоры 3. На опоре 3 вы полнены двухсторонние упоры 16 для ограничения углбвого поворота рычага
55
35
0 дд
7 управления. Вращательное движение опоры 3 передается на шток 4 и поводок 5 шпонкой 17 через паз 18.
Механизм работает следующим образом.
В исходном положении рычаг 7 уп равления удерживается пружиной 15 в верхнем положении и его конец 14 вза имодействует с концом 12 дополнительного рычага 10 на плече h. Для выбора передачи рычаг 7 управления поворачивают в.плоскости, параллельной оси штока 4, до соприкосновения с - упором 16, при этом дополнительный рычаг 10 поворачивается на угол, со- ответствуюшяй линейному перемещению, штока 4 с поводком 5 влево или вправо на расстояние, необходимое для выбора двух средних ползунов 2 переключения передач. Для включения выбранной передачи рычаг 7 управления совершает качающееся движение совмест но с опорой 3 перпендикулярно продольной оси штока 4, при этом через шпонку 17 и паз 18 оно передается на шток 4 и поводок 5, который перемещает выбранный ползун 2 переключения передач и включает требуемую пере- дачу.
Для включения передач, связанных с крайними ползунами 2 переключения передач, необходимо рычаг 7 управле НИН, преодолевая сопротивление пружин 15,- переместить вертикально вниз. При этом конец-14 рычага 7 управления перемеш,ается по-пазу 13 другого конца 12 дополнительного рычаги 10 до упора. Б этом положении конец 14 ры чага 7 управления взаимодействует t. другим концом 12 дополнительного ры чага 10 на плече h., меньшим h,. Для выбора передачи рычаг 7 управления поворачивают в плоскости, параллель55
ной оси штока 4 до соприкосновения с упором 16, при этом дополнительный рычаг 10 и.з-за того, что плечо h меньше h, поворачивается вокруг оси шарнира 9 на угол, больший чем в первом случае, что соответствует линейному перемещению штока А с поводком 5 влево или вправо на расстояние необходимое для выбора двух крайних ползунов 2 переключения передач. Включение выбранной передачи производится аналогично описанному.
Формула изо
р е т е н и я
Механизм дистанционного управления коробкой передач транспортного средства, содержащий установленные с возможностью линейного перемещения относительно корпуса ползуны переключения передач, поворотную относительно корпуса опору, шток с поводком для взаимодействия с лунками ползунов
0
переключения передач, установленный в опоре с возможностью осевого перемещения, и зафиксированный от вращения рычаг управления, установленный на шарнире относительно опоры дополнительный рычаг, связанный одним концом со штоком и снабженный на другом конце пазом для взаимодействия с концом рычага управления, отличающийся тем, что, с целью облегчения управления за счет уменьшения зоны продольного качания рычага, ось шарнира дополнительного рычага расположена параллельно оси шарнира рычага управления, при зтом рычаг управления устаГювлен с возможностью перемещения относительно шарнира перпендикулярно к его оси и подпружинен относительно опоры, а на опоре выполнены двухсторонние упоры для ограничения углового поворота рычага управления . I 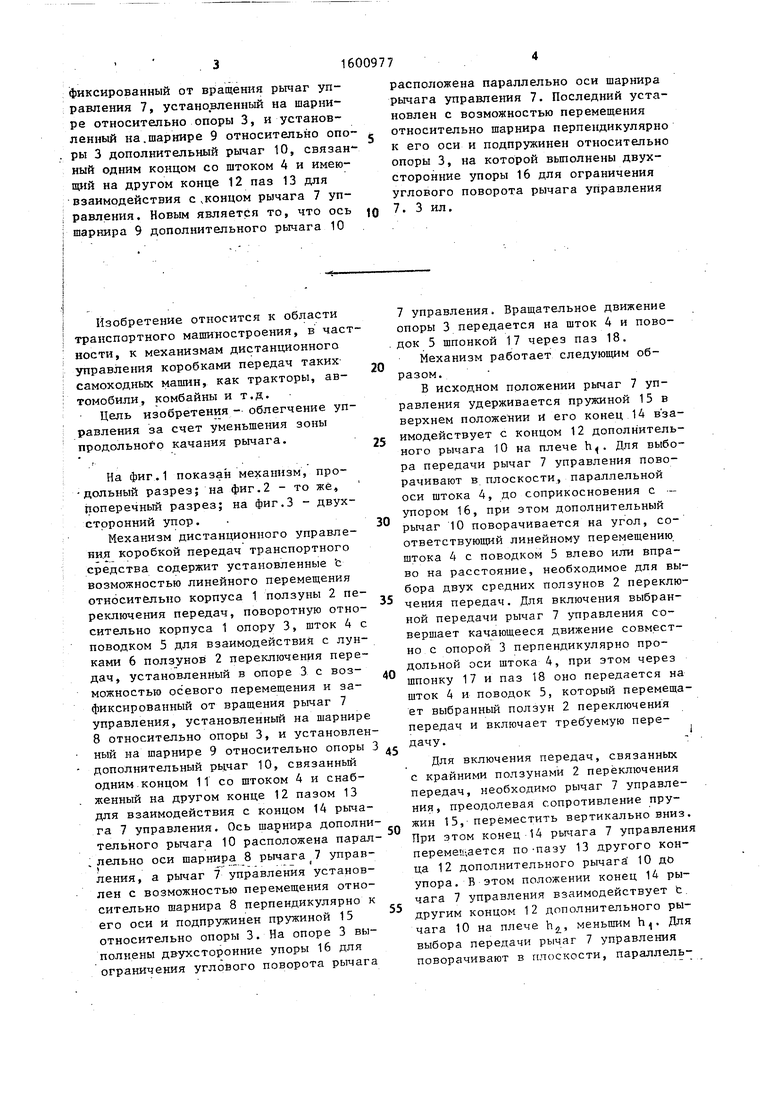
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления коробкой передач транспортного средства | 1988 |
|
SU1691159A1 |
| Механизм дистанционного управления коробкой передач транспортного средства | 1987 |
|
SU1504121A1 |
| Механизм дистанционного управления коробкой передач транспортного средства | 1988 |
|
SU1539087A1 |
| Механизм дистанционного управления коробкой передач транспортного средства | 1990 |
|
SU1720905A1 |
| Механизм дистанционного управления коробкой передач транспортного средства | 1989 |
|
SU1632819A1 |
| Механизм дистанционного управления коробкой передач транспортного средства | 1989 |
|
SU1710376A1 |
| Устройство для управления коробкой передач транспортного средства | 1980 |
|
SU968795A2 |
| Устройство для управления коробкой передач транспортного средства | 1985 |
|
SU1301732A1 |
| Устройство для управления коробкой передач | 1979 |
|
SU947846A1 |
| Устройство дистанционного управления коробкой передач | 1986 |
|
SU1388337A1 |
Изобретение относится к транспортному машиностроению, в частности к механизмам дистанционного управления коробками передач таких самоходных машин, как тракторы, автомобили, комбайны и т.д. Цель изобретения - облегчение управления за счет уменьшения зоны продольного качания рычага. Механизм дистанционного управления коробкой передач транспортного средства содержит установленные с возможностью линейного перемещения относительно корпуса 1 ползуны 2 переключения передач, поворотную относительно корпуса 1 опору 3, шток 4 с поводком 5 для взаимодействия с лунками 6 ползунов 2 переключения передач, установленный в опоре 3 с возможностью осевого перемещения и зафиксированный от вращения рычаг управления 7, установленный на шарнире относительно опоры 3, и дополнительный рычаг 10, связанный одним концом со штоком 4 и имеющий на другом конце 12 паз 13 для взаимодействия с концом рычага управления 7. Новым является то, что ось шарнира 9 дополнительного рычага 10 расположена параллельно оси шарнира рычага управления 7. Последний 7 установлен с возможностью перемещения относительно шарнира перпендикулярно к его оси и подпружинен относительно опоры 3, на которой выполнены двусторонние упоры 16 для ограничения углового поворота рычага управления 7. 3 ил.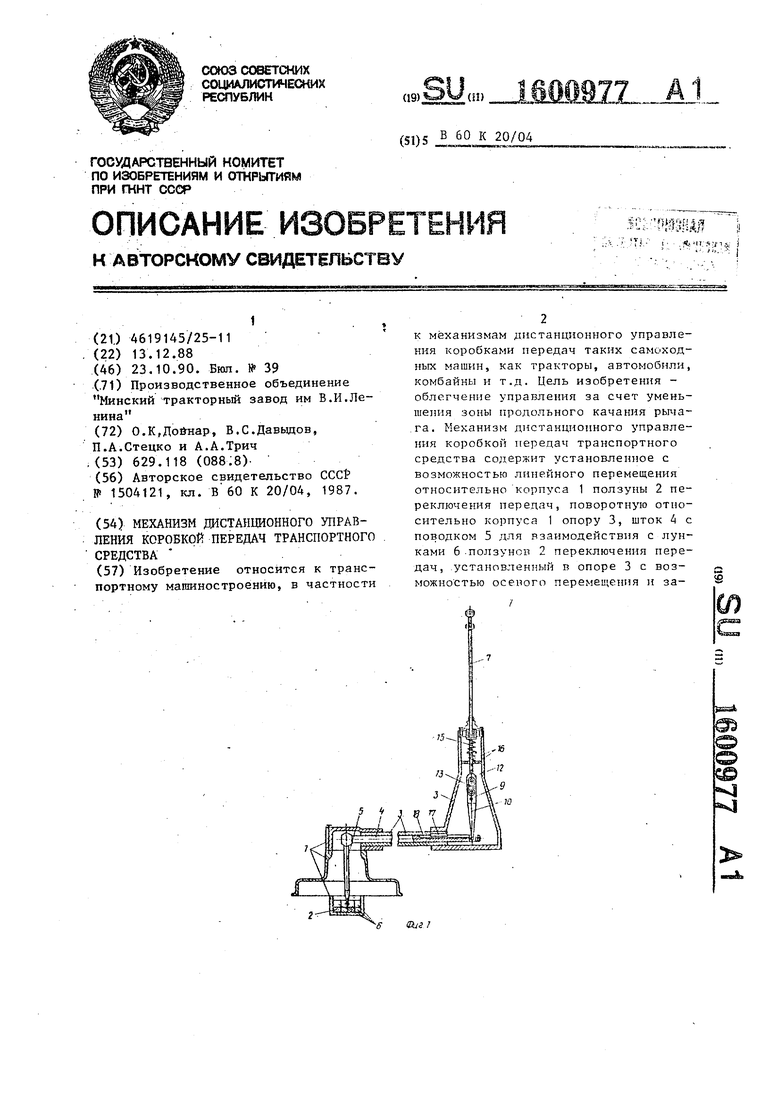
;з
Фиг.2
QPuz5
