г1
Фи9.1
Изобретение относится к транспортному машиностроению, в частности к механизмам дистанционного управления коробками передач самоходных машин типа тракторов и аналогичных транспортных средств.
Цель изобретения - улучшение условий эксплуатации путем уменьшения зоны качания рычага.
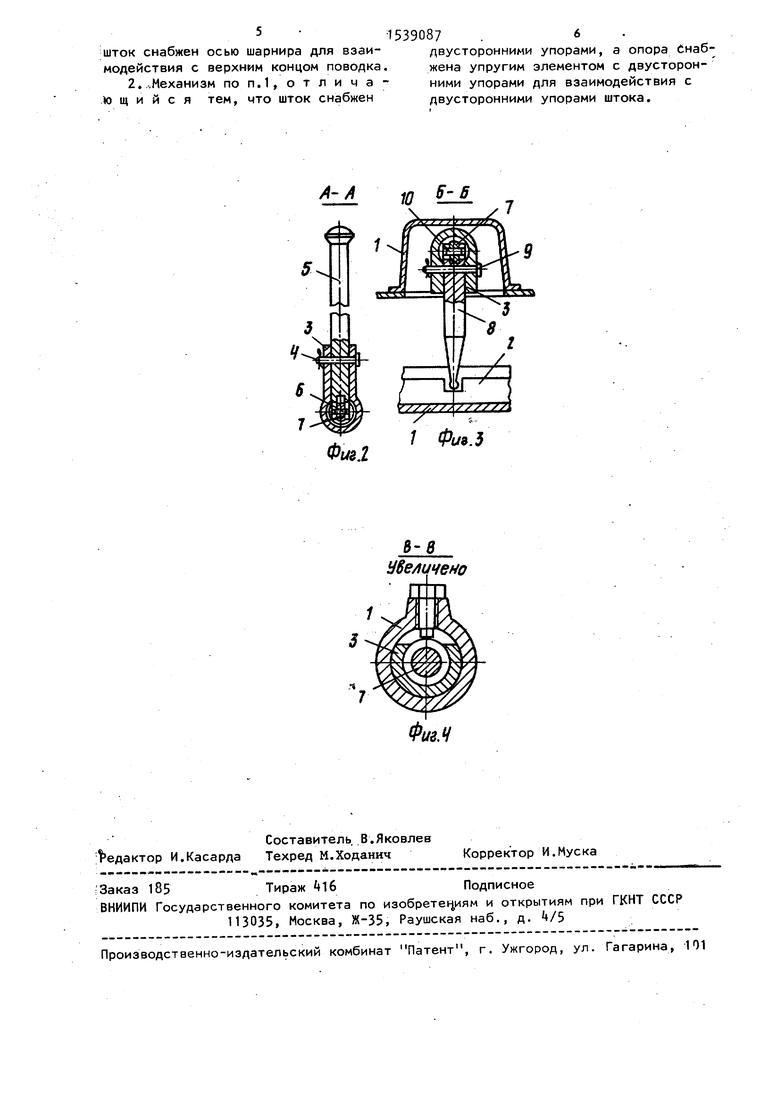
На фиг. 1 изображен механизм дистанционного управления коробкой передач транспортного средства, общий вид; на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 - разрез Б-Б на фиг.1; на фиг. 4 - разрез В-В на фиг. 1.
Механизм дистанционного управления коробкой передач транспортного средства содержит установленные в корпусе 1 ползуны 2 переключения .передач, поворотную относительно .корпуса 1 опору 3, установленные на шарнире 4 относительно опоры 3 рычаг
5управления, связанный через шарнир
6с соосным опоре 3 штоком 7, поводок 8 для выборочного взаимодействия с ползунами 2 переключения передач. Для уменьшения- зоны качания рычага
5 управления поводок 8 установлен относительно опоры 3 на шарнире 9 и связан со штоком через шарнир 10. Величина зоны качания рычага 5 управления для выбора ползунов 2 переключения передач определяется взаимным положением осей шарниров 4, 6, 9, Ю Кроме того, шток 7 снабжен двусторонними упорами, выполненными, например с одной стороны в виде перепада диаметров 11 на конце 12 штока 7, а с другой стороны - в виде стопорного кольца 13. Двусторонние упоры 11 и 13 штока 7 расположены с двух сторон от упоров 14 и 15 упругого элемента 16, установленного в деформированном состоянии в расточке 17 опоры 3.
Механизм дистанционного управлени коробкой передач транспортного средства работает следующим образом.
Для выбора одного из ползунов 2 переключения передач рычаг 5 управления поворачивается относительно шар- нира 4. При этом за счет штока 7 и шарниров 6 и 10 передается движение на поводок 8, поворачивая его относительно опоры 3 на шарнире 9. Так как усилия для выбора ползунов 2 пе- реключения передач практически не требуется, то. соответствующим расположением осей шарниров 4, 6, 9, Ю
0
5
0
5
0
5
0
5
достигается снижение величины попе- речного качания рычага 5 управления (для выбора ползунов 2 переключения передач. Информацию о выборе средних ползунов 2 переключения передач водитель получает при подходе одного из двусторонних упоров 11 или 13 к одному из двусторонних упоров 14 или 15 упругого элемента 16 (одно из по- |ложений показано на фиг., при этом происходит ощутимое возрастание усилия на рычаге 5 управления). Информацию о выборе крайних ползунов 2 переключения передач водитель получает при упоре конца поводка 8 в корпус 1.
Для переключения выбранного ползуна переключения передач рычаг 5 управления совместно с опорой 3 и поводком 8 поворачиваются относительно оси опоры 3. Так как для перемещения ползуна 2 переключения передач требуется повышенное усилие, то повышение передаточного отношения от рычага 5 управления к ползунам 2 переключения передач при переключении ползуна 2 способствует снижению общего усилия управления коробкой передач транспортного средства.
Таким образом, установка поводка 8 в шарнире 9 относительно опоры 3 и связь со штоком 7 через шарнир 10, а также снабжение штока 7 двусторонними упорами 11 и 13 для взаимодействия с двусторонними упорами 14 и 15 упругого элемента 16, установленного в реформированном состоянии в расточке 17 опоры 3, уменьшают зону качания рычага 5 управления коробкой передач.
Формула изобретения 1. Механизм дистанционного управления коробкой передач транспортного средства, содержащий установленные в корпусе ползуны переключения передач, поворотную относительно корпуса опо- -ру, соосный опоре шток, установленный в нем с возможностью осевого перемещения поводок для взаимодействия с ползунами переключения передач и рычаг управления, установленный в шарнире относительно опоры и связанный через шарнир со штоком, отличающийся тем, что, с целью повышения удобства пользования путем уменьшения зоны качания рычага, поворотная опора снабжена шарниром, на котором установлен поводок с возможностью качания вдоль оси штока, а
5 1539087 . 6
шток снабжен осью шарнира для взаи- двусторонними упорами, а опора Снаб- модействия с верхним концом поводка. жена упругим элементом с двусторон2. Механизм поп.1,отлича- ними упорами для взаимодействия с to т и и с я тем, что шток снабжен двусторонними упорами штока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм дистанционного управления коробкой передач транспортного средства | 1988 |
|
SU1600977A1 |
| Механизм дистанционного управления коробкой передач транспортного средства | 1987 |
|
SU1504121A1 |
| Устройство для дистанционного управления коробкой передач транспортного средства | 1988 |
|
SU1691159A1 |
| Механизм дистанционного управления коробкой передач транспортного средства | 1990 |
|
SU1720905A1 |
| Механизм дистанционного управления коробкой передач транспортного средства | 1989 |
|
SU1632819A1 |
| Механизм дистанционного управления коробкой передач транспортного средства | 1989 |
|
SU1710376A1 |
| Устройство для управления коробкой передач | 1979 |
|
SU947846A1 |
| Дистанционный привод управления переключением передач транспортного средства | 1982 |
|
SU1017526A1 |
| Механизм управления коробкой передач транспортного средства | 1983 |
|
SU1164087A1 |
| Привод управления переключением передач транспортного средства | 1987 |
|
SU1446001A1 |
Изобретение относится к транспортному машиностроению, в частности к механизмам дистанционного управления коробками передач самоходных машин типа тракторов и аналогичных транспортных средств. Цель изобретения - повышение удобства пользования путем уменьшения зоны качания рычага. Механизм содержит корпус 1, установленные в корпусе ползуны 2 переключения передач, поворотную относительно корпуса опору 3, соосный с опорой шток 7, установленный в ней с возможностью осевого перемещения, поводок 8 для взаимодействия с ползунами 2, рычаг 5 управления, установленный в шарнире 4 относительно опоры 3 и связанный через шарнир 6 с штоком 7. Новым является то, что поводок 8 установлен в шарнире 9 относительно опоры 3 и связан с штоком 7 через шарнир 10, а также шток 7 снабжен двусторонними упорами 11 и 13 для взаимодействия с двусторонними упорами 14 и 15 упругого элемента 16, установленного в деформированном состоянии в опоре 3. 1 з.п. ф-лы, 4 ил.
А-А
6-В
1 Фи9.5
В-в Увеличено
Фиг.Ч
| МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 0 |
|
SU203493A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
