О
О ГчЭ
о
Изобретение относится к автоматизации загрузки изделий в рабетотех- нологических комплексах.
Цель изобретения - увеличение удельной емкости устройства за счет перемещения в позицию разгрузки изделий непосредственно в нецодвижной кассете.
На фиг.1 изображен фрагмент робо- п тотехнологического комплекса с предлагаемым загрузочным устройством, план; на фиг.2 - механизм шагового перемещения загрузочного устройства, сечение А-А на фиг.1; на фиг.З - вид Б на и фиг.2.
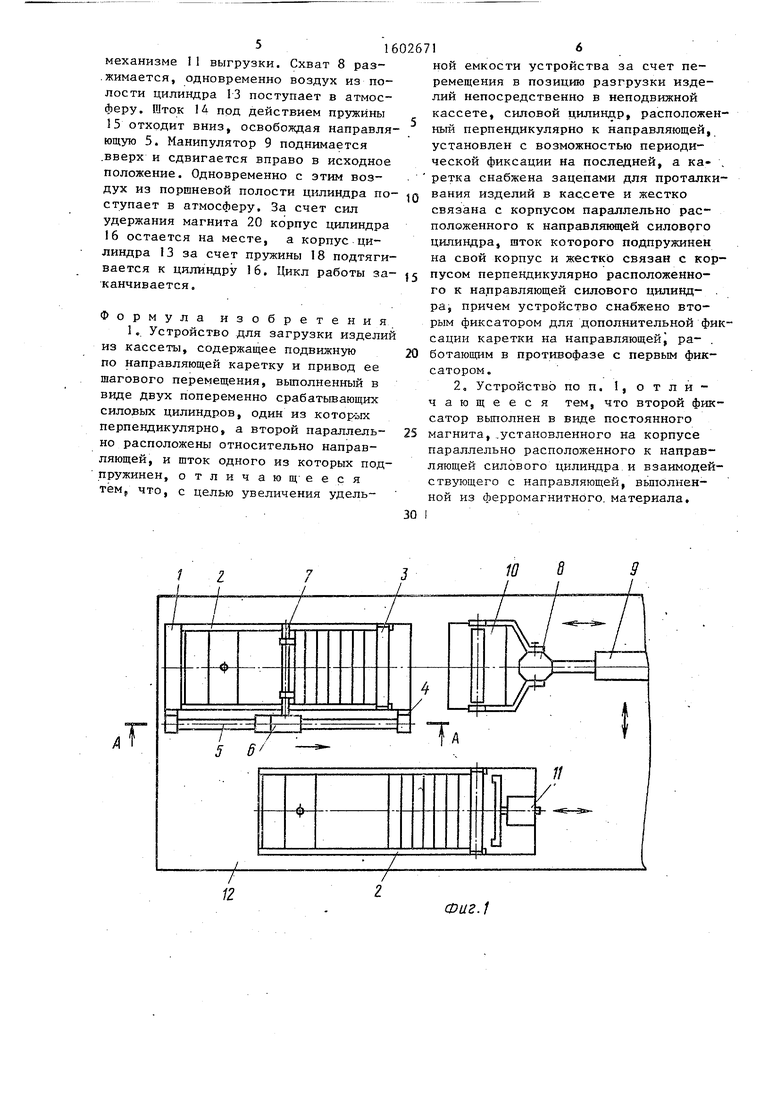
Загрузочное устройство (фиг.1) соержит основание 1, на котором уста-/ новлена кассета 2 с изделиями 3. На основании Г посредством стоек 4 за- jO креплена направляющая 5. На направляющей 5 размещен с возможностью перемещения вдоль нее привод 6 шагового перемещений каретки 7. На фиг.1 изображены также схват 8 манипулято- 25 ра 9, технологический модуль 10, узел 11 выгрузки, закрепленные на базовой плите 12. Привод 6 шагового перемещения (фиг. 2) содержит первый силовой цилиндр 13, установленный с воз- -зп можностью перемещения вдоль направляющей 5, шток 14 цилиндра -13 установлен перпендикулярно направляющей 5 и подпружинен пружиной 15. На на- , прав-ляющей 5 установлен второй силовой цилиндр 16, шток 17 которого подпружинен пружиной 18 и установлен в корпусе цилиндра 16 параллельно направляющей 5. Цилиндры 13 и 16 снабжены крьгожами-штуцерами 19 для подачи сжатого воздуха из пневмопанели манипулятора 9. Шток 17 цилиндра .16 жестко связан с корпусом цилиндра J3. На корпусе цилиндра 16 неподвижно закреплен постоянный магнит 20 с воз- дс можностью перемещения вместе с корпусом цилиндра 16 по направляющей 5, На стойке 4, расположенной со стороны выходного звена загрузочного устройства .закреплен датчик 21 отсутствия изделий в кассете. В штоковой полости цилиндра 16 установлена сменная втулка 22, определяюща я шаговый ход цилиндра 16 в- зависимости от ширины изделия 3. Позицией 23 обозначены уплотнительные элементы ци линдров 13 и 16.
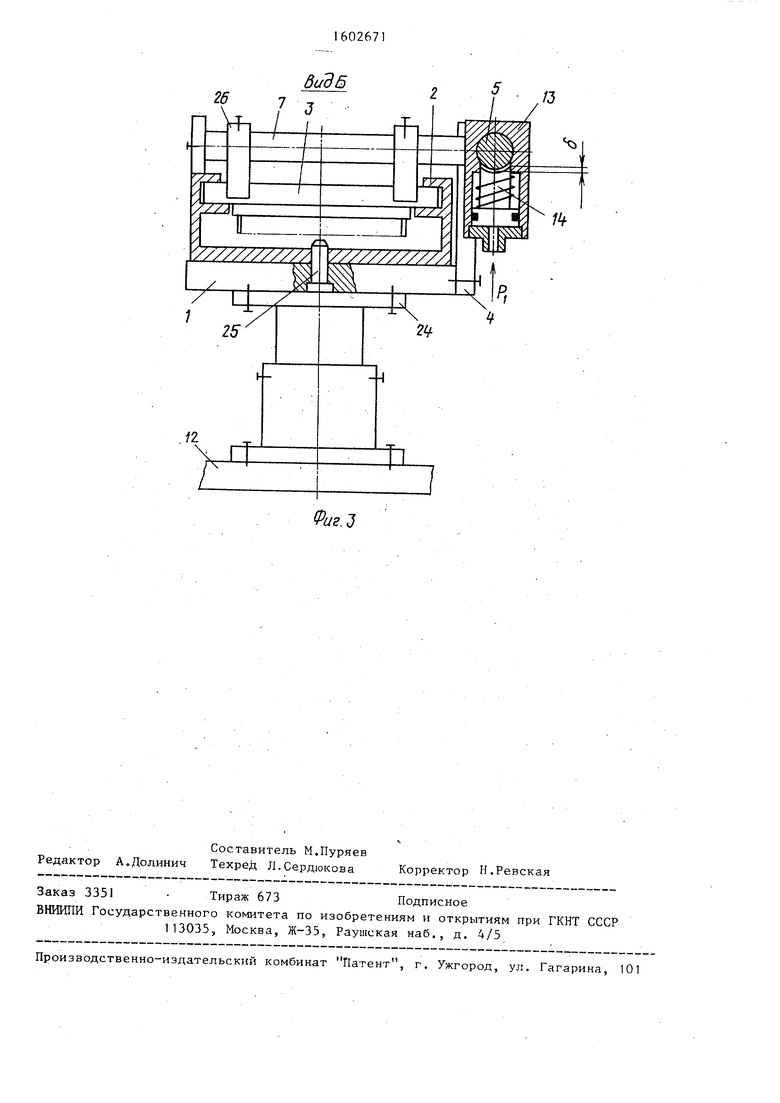
На фиг.З изображена боковая проекция загрузочного устройства, кото35
.- 55
п и
jO 5 зп с 5
5
рая с помощь ю регулируемой по углу поворота и высоте стойки 24 закреплена к базовой плите 12. Съемная кассета 2 с изделиями 3 установлена на основании 1 загрузочного устройства с помощью ловителя 25. На каретке 7. установлены зацепы 26, расстояние между которыми регулируется в зависимости от типоразмера изделия 3 по длине.
Устройство работает следующим образом.
Предварительно оператор устанавливает кассету 2 с изделиями 3 на основание 1, а на механизм 11 выгрузки - аналогичную пустую кассету. Рука манипулятора 9 находится в верхнем втянутом положении. Схват .8 разжат, каретка 7 загрузочного устройства находится в крайнем левом по фиг.1 положении. По команде .Пуск рука манипулятора 9 перемещается вперед к загрузочному устройству и ось схвата 8 совмещается с осью первого изделия в кассете 2. Далее манипулятор 9 опускается вниз, затем поступает команда на сжатие схвата 8, который удерживает изделие 3 за боковые поверхности. Одновременно через крьщ ку-шту- цер в цилиндр 13 поступает сжатый воздух от штатного пневмоцилиндра манипулятора 9. DITOK 14, вьвдвигаясь. выбирает зазор б между направляющей 5 и штоком 14 (фиг.З). В результате ; корпус цилиндра 13 фиксируется на направляющей 5. Далее рука манипулятора 9 поднимается с изделием 3 вверх втягивается и опускается на технологический модуль, где происходит необходимая операция над изделием. Далее манипулятор 9 извлекает из модуля 10 изделие и сдвигается влево к механизму 11 выгрузки. Одновременно со сдвигом манипулятора в поршневую полость цилиндра 16 подается давление воздуха. Шток 17 цилиндра 16 остается на месте, так как. он .жестко связан с цилиндром 13, который в этот момент зафиксирован на направляющей 5. Поэтому перемещается корпус цилиндра 16 с которым связана карет- ка 7, на величину шага t, равного ширине изделия.
В результате этого стопа изделий перемещается вправо (фиг.1) до упора в торцовую стенку кассеты 2. Далее манипулятор 9 опускает изделие в приемную кассету 2, установленную на
механизме I 1 выгрузки. Схват 8 раз- .жимается, одновременно воздух из полости цилиндра 13 поступает в атмосферу, Иток 14 под действием пружины
15отходит вниз, освобождая направляющую 5. Манипулятор 9 поднимается
.вверх и сдвигается вправо в исходное положение. Одновременно с этим воздух из поршневой полости цилиндра поступает в атмосферу. За счет сил удержания магнита 20 корпус цилиндра
16остается на месте, а корпус ци10
НОИ емкости устройства за счет перемещения в позицию разгрузки изделий непосредственно в неподвижной кассете, силовой цилиндр, расположенный перпендикулярно к направляющей, установлен с возможностью периодической фиксации на последней, а каретка снабжена зацепами для проталкивания изделий в кассете и жестко связана с корпусом параллельно расположенного к направляющей силового цилиндра, шток которого подпружинен
линдра 13 за счет пружины 18 подтяги- на свой корпус и жестко связан с кор- вается к цилиндру 16. Цикл работы за- «с пусом перпендикулярно расположенно- канчивается.
го к направляющей силового цилинд- , ра, причем устройство снабжено вторым фиксатором для дополнительной фиксации каретки на направляющейj раФормула изобретения
1.. Устройство для загрузки издели из кассеты, содержащее подвижную по направляющей каретку и привод ее шагового перемещения, вьтолненный в виде двух попеременно срабатывающих силовых цилиндров, один из котор-ых перпендикулярно, а второй параллельно расположены относительно направляющей, и шток одного из которых подпружинен, отличающееся темр что, с целью увеличения удель0
НОИ емкости устройства за счет перемещения в позицию разгрузки изделий непосредственно в неподвижной кассете, силовой цилиндр, расположенный перпендикулярно к направляющей, установлен с возможностью периодической фиксации на последней, а каретка снабжена зацепами для проталкивания изделий в кассете и жестко связана с корпусом параллельно расположенного к направляющей силового цилиндра, шток которого подпружинен
на свой корпус и жестко связан с кор- с пусом перпендикулярно расположенно-
на свой корпус и жестко связан с кор- пусом перпендикулярно расположенно-
го к направляющей силового цилинд- , ра, причем устройство снабжено вторым фиксатором для дополнительной фиксации каретки на направляющейj работающим в противофазе с первым фиксатором.
2, Устройство по п. 1, о т л и - чающееся тем, что второй фиксатор выполнен в виде постоянного
магнита, .установленного на корпусе параллельно расположенного к направляющей силового цилиндра и взаимодействующего с направляющей, вьшолнен- ной из ферромагнитного, материала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Устройство для подачи заготовок | 1987 |
|
SU1648729A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Устройство для автоматической простановки стержней | 1985 |
|
SU1268281A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Автоматическая линия обработки деталей | 1976 |
|
SU707978A1 |
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
| Устройство для сварки изделий из полимерных материалов | 1981 |
|
SU1031743A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
Изобретение относится к автоматизации загрузки изделий в робототехнологических комплексах. Цель изобретения - увеличение удельной емкости устройства за счет перемещения в позицию разгрузки изделий непосредственно в неподвижной кассете. Устройство содержит основание 1, на котором установлена кассета с изделиями и подвижную по направляющей 5 каретку с зацепами для проталкивания изделий в позицию разгрузки непосредственно в кассете и с приводом ее шагового перемещения посредством двух попеременно срабатывающих силовых цилиндров 13 и 16, первый из которых перпендикулярно расположен к направляющей 5 и установлен с возможностью периодической фиксаци на ней, а второй - параллельно. С корпусом силового цилиндра 16 жестко связана каретка, а его шток 17 в свою очередь подпружинен относительно корпуса и жестко связан с корпусом силового цилиндра 13. Устройство снабжено также вторым фиксатором, выполненным в виде постоянного магнита 20, подвижного относительно ферромагнитной направляющей 5. При попеременном срабатывании цилиндров 13 и 16, а также фиксатора в виде магнита 20 осуществляется шаговое перемещение изделий в кассете, установленной неподвижно на основании. 1 з.п. ф-лы. 3 ил.
7
Т
5 6
Т /2
10 8
1 /
Фиг.1
Фиг. J
| Загрузочное устройство | 1986 |
|
SU1340974A1 |
